The topic of oscillations is important in physics education. This is not only true because of the numerous applications,
but also because oscillations and waves, in addition to particles, form the foundation of modern physics.
Oscillations is also a topic where modelling comes in handy because many of its applications are explored via mathematical models.
Below are some examples of dynamic models on oscillatory behaviour1 belonging to the subdomain Information Transfer in
the physics syllabus on Waves,2,3 with corresponding files for the Coach 7 modelling environment.4
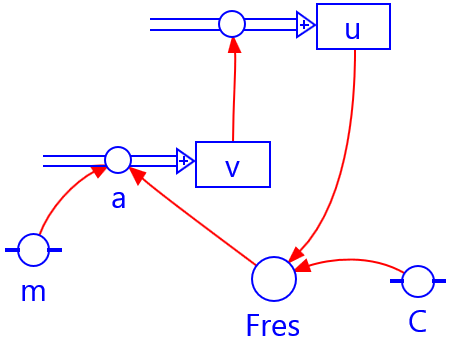
A mass hanging on a spring attached to a fixed suspension point is set into vibration.
A harmonic motion is the result when the resultant force on the mass \(m\) is proportional
to the deviation \(u\) from equilibrium: $$ F_{\rm res}= - C\cdot u $$ The proportionality constant \( C \) is called the spring constant.
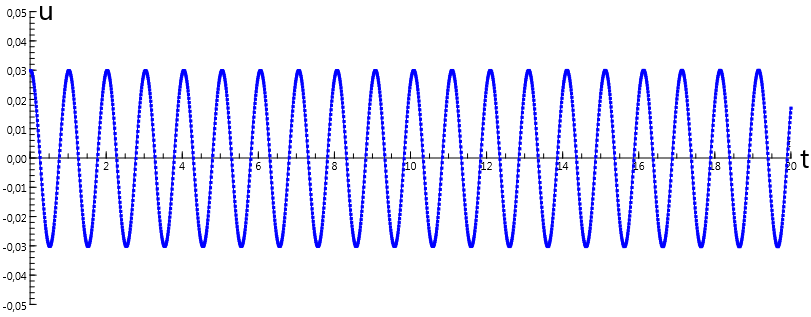
The harmonic motion as a result of this force law has a period of vibration \( T= 2 \pi
\sqrt{m/C}\).
Formulas in Binas:
$$\begin{array}{l}F_{\rm s}= C\cdot u \\ u(t)= A \sin \left( \frac{2\pi}{T} \cdot
t\right) \end{array}$$
Difference equations:
$$\begin{array}{l}\Delta v= (F_{\rm res}/m)\cdot \Delta t \\ \Delta u= v\cdot \Delta
t \end{array}$$
Text-based model
\(\begin{array}{l} F_{\rm res}= - C \cdot u \\ a=F_{\rm res}/m \\ v=v + a \cdot dt
\\u = u + v\cdot dt\\ t=t+ dt \end{array}\)
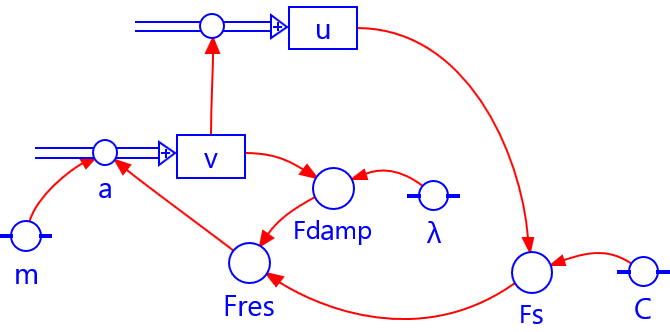
As a simple model for a damped oscillation we consider a harmonic motion that is damped by a frictional force proportional to the velocity
$$F_{\rm damp}= \lambda \cdot v$$ The constant \( \lambda \) describes the strength of the damping force,
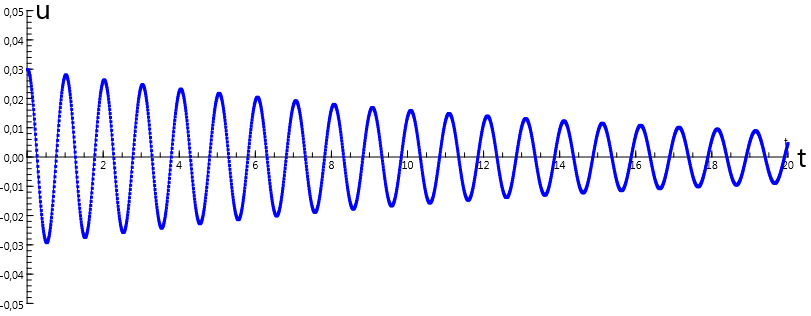
for example casued by a viscous liquid in a shock absorber. The effect of the damping force is that the amplitude of the vibration
decreases. For a small damping force this decrease is exponential.
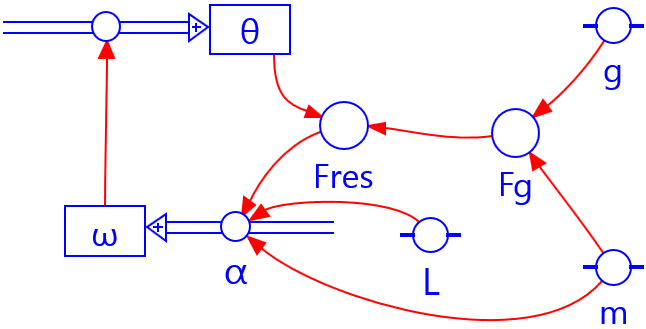
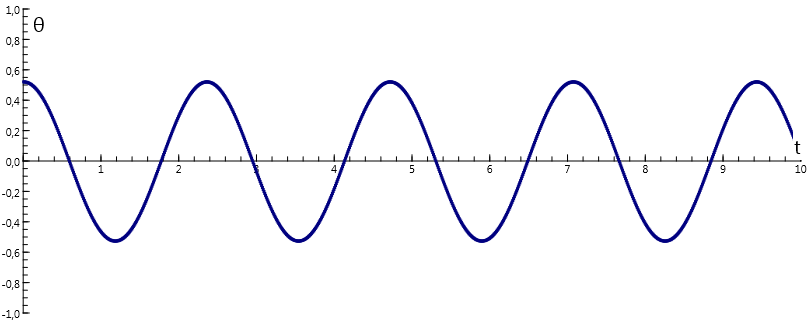
The model of a mathematical pendulum describes the motion of a mass \(m\)
attached to a stiff chord of length \(L\) hung up on a fixed suspension point.
When the pendulum is moved out of its equilibrium position, the mass moves along an arc of length
\( s = \theta \cdot L \), where \( \theta \) is the angle (in radians) between the pendulum and the vertical line.
The resultant force is minus the tangential component of gravity along the arc:
$$F_{\rm res} = - F_{\rm g} \cdot \sin \theta $$
When released, the mass performs a pendulum motion under the influence of gravity
with period of vibration \( T \approx 2\pi \sqrt{L/g} \) for small angles.
Formulas in Binas:
$$ \begin{array}{l} F_{\rm g} =m\cdot g \\ \omega = d\theta / dt \\ T = 2\pi /
\omega \end{array} $$
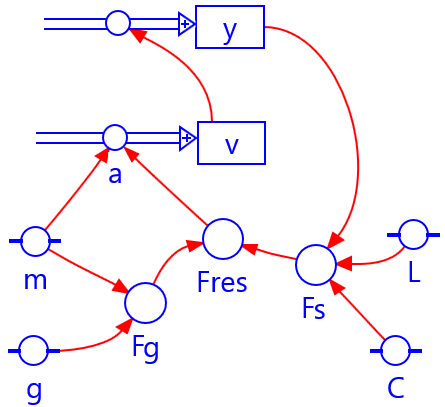
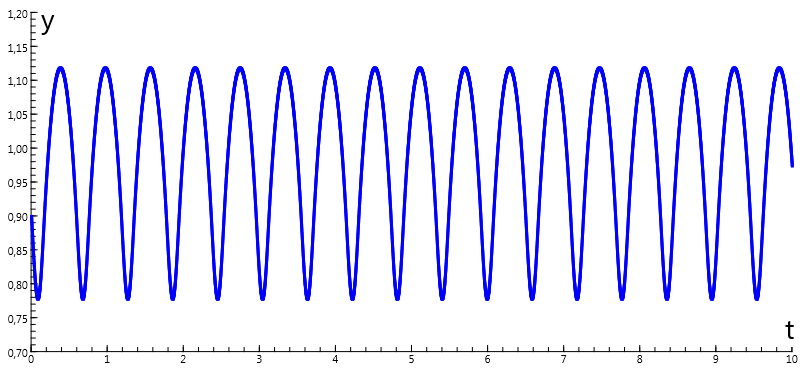
The inverted spring-mass model is a model that can be applied in
biophysics.5 The model describes a falling object of mass \(m \)
that is absorbed and reflected via a spring of length \( L \). When the
vertical coordinate \( y \) of the object is greater than the length \(L\) the object is in free fall;
when \(y < L \) then the object is subject to an additional linear spring force $$F_{\rm s} = C \cdot (L - y)$$
The elasticity of the spring is here described by the spring constant \(C \).
Formulas in Binas:
$$ \begin{array}{l}F_{\rm g} =m\cdot g \\ F_{\rm s}= C\cdot u \end{array}$$
Difference equations:
$$ \begin{array}{ll}\Delta v= (F_{\rm res}/m)\cdot \Delta t & \\ \Delta y=
v\cdot \Delta t & \\ F_{\rm res}= - F_{\rm g} +F_{\rm s} & y < L\\ F_{\rm
res}= - F_{\rm g} & y \geq L \end{array} $$
Text-based model
\(\begin{array}{l} {\rm If} \; y < L\\ \quad {\rm Then}\; F_{\rm s}=C \cdot (L-y)
\\ \quad {\rm Else}\; F_{\rm s} =0 \\ {\rm EndIf}\\ F_{\rm g} = m \cdot g \\
F_{\rm res} = - F_{\rm g} + F_{\rm s}\\ a=F_{\rm res}/m \\ v=v+ a \cdot dt\\ y = y +
v \cdot dt \\ t = t + dt \end{array}\)
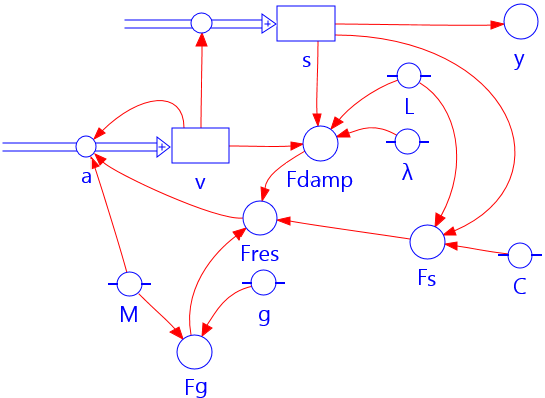
In this model, the fall of a bungee jumper is modelled. In the initial phase of the jump we consider
the bungee jumper as a falling mass \(M\) attached to a elastic cord as in the chained-mass model
1.9, but in this case with neglect of the mass of the cord because it is small with respect to the mass of the jumper.
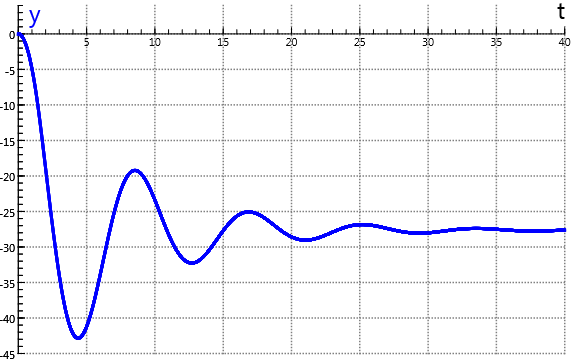
When the jumper has reached the end \(L\) of the elastic cord, then an extension phase is followed by a damped
upward and downward motion of the bungee jumper on the cord.
For the model of this oscillatory motion we assume that
\(M\) is subject to an elastic spring force \(F_{\rm s}=C \cdot (s −L)\) and to a
damping force \(F_{\rm damp}=\lambda \cdot v\) proportional to the velocity.
Formulas in Binas:
$$\begin{array}{l}{F_{\rm g}} = m \cdot g\\ F_{\rm s}=C \cdot u \end{array}$$
Difference equations:
$$ \begin{array}{l} {\Delta v} = (F_{\rm res}/M) \cdot \Delta t \\ \Delta s = v
\cdot \Delta t\end{array} $$
The resultant force is the gravitational force minus the spring force and the damping force:
$$ F_{\rm res} = M \cdot g - F_{\rm s} - F_{\rm damp}$$ under the condition that \( F_{\rm s}=0, F_{\rm damp}=0\) if \(s < L \).
Text-based model
\(\begin{array}{l} F_{\rm g} = M \cdot g \\ {\rm If} \; s < L\\ \quad {\rm Then}
\; F_{\rm s}=0, \; F_{\rm damp}=0\\ \quad {\rm Else}\; F_{\rm s} =C \cdot (s-L),
\; F_{\rm damp}=\lambda \cdot v\\ {\rm EndIf}\\ F_{\rm res} = F_{\rm g} - F_{\rm
s} - F_{\rm damp} \\ a= F_{\rm res}/M\\ v= v + a \cdot dt \\ s = s + v \cdot dt\\ t
= t + dt \end{array}\)
Graphical model
Initial values (SI)
\(\begin{array}{l} g = 9{.}81 \\ L=11 \\C=41{.}3\\\lambda=20\\M = 70 \\ v = 0\\ s = 0
\\t = 0 \\ dt = 0{.}001 \end{array}\)