Labbook IMAV
Started Labbook 2014.
November 9, 2013
- Coupled the dashboard webcam to nb-udk. Trick was to use th on-button for three seconds. Gneral pc-camera drivers were loaded by Windows7. Could use (after some testing), the webcam inside Matlab (testcam.m from AMR assignment 3):
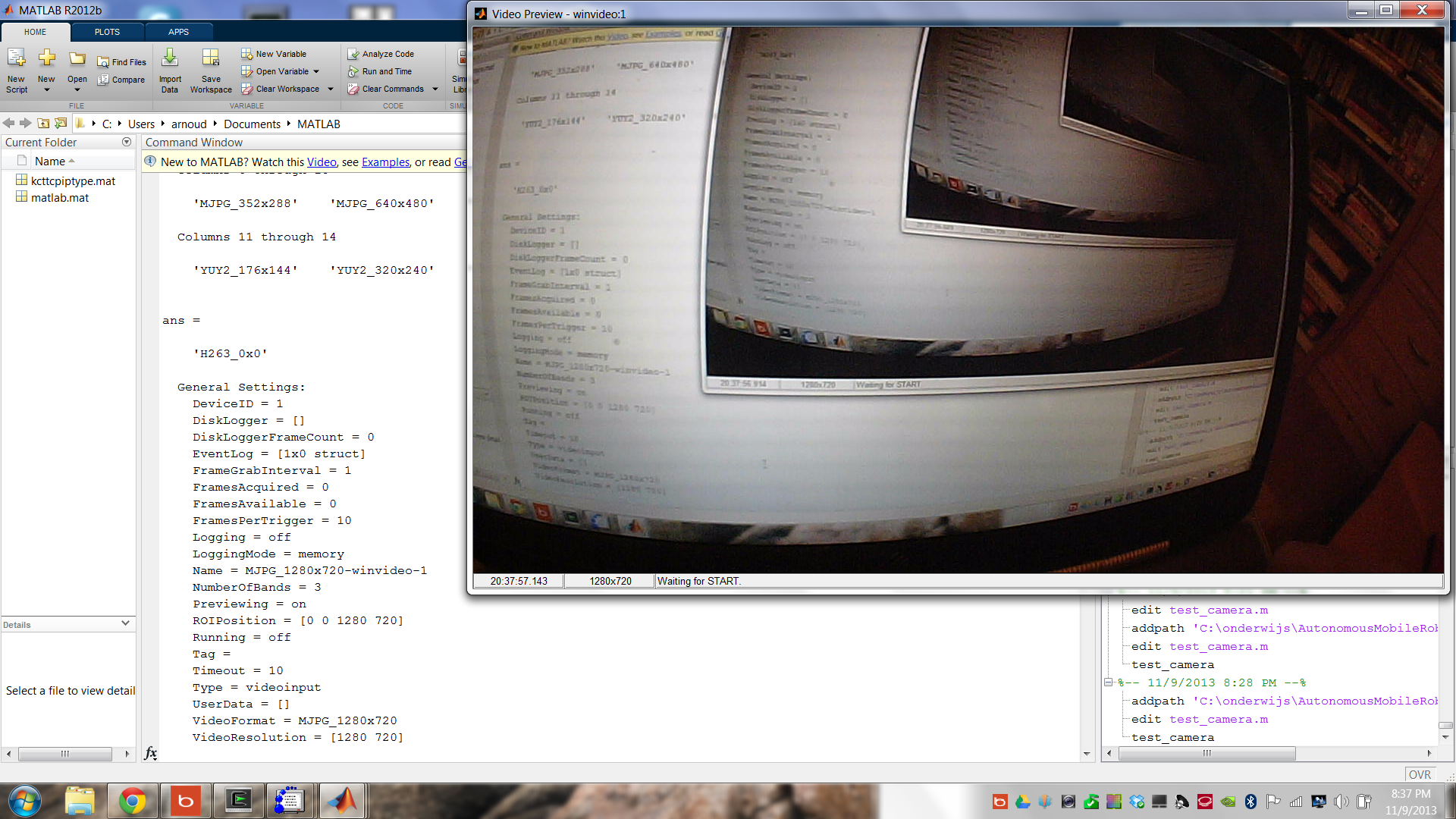
- With the botton on the camera is also recognized by Linux. Recognized by usb as Camera from TechSys. Also recognized by uvcvideo as UVC 1.00 device. Installed Cheese, which showed the video (although no button to switched to integrated webcam (and many Tcl warnings).
November 8, 2013
October 31, 2013
- Read Robotized Plant Probing, which contains a method of enhancement of the segment boundaries based on segment dissimlarity (p. 53). This method is maybe also applicable for Jaysinh.
October 14, 2013
- Installed the crasyradio driver on nb-udk. The CrazyRadio is based on the RF24 standard on 2.4 GHz ISM (Industrial, Scientific and Medical) band. This means that I should also be able to connect to my solar panels :-).
- Downloaded Nordic nRFgo SDK and installed in C:\Programs\Nordic. The Docs\nrf_sdk.chm is most informative. Decided to try the UART "Hello World" example.
- SDK contains only example code, no project files. Also installed nRFgo Studio, which includes JLink OB CDC Driver (Installed in C:\Programs\Segger.
- Compiled the code with command cl main.c -I ../../../compiler/common -I ../../../hal/nrf24le1 -I ../../../compiler/c51 /link /OUT uart_example, but makes fails on redefinition of basic types (uart_example reimplements for instance putchar). Should give the option not to include the standard includes.
October 3, 2013
- Got an AR.Drone 1 from Venture Labs. The drone had a broken central cross, which I repaired with the video. Note that the screw-driver has two sides, that the supports between the main board and the navigation board have to be mounted with their curve outside. Also start with a clean floor, that helps a lot when you drop something.
September 13, 2013
- Saw that Industry, Scientific & Medic radio band ISM at 868MHz is less crowded and can cover 100m indoors, 300m outdoors. The dongle for the Rasberry Pi has drivers for Linux and Windows7s and weights 11 gram (IC only 3.5 gram). Software is available at easyRadio. It should work for the control (not the video).
August 21, 2013
- Did a search about the algorithm inside ZXing, but found not much (except a Software Engineering thesis from Sweden concentrating on the 1D bar-code detection). Checked the site and finaly the code. The logic seems to be located in the file Detector.java.
May 28, 2013
- I have a copy of the IMAV's team git repository on nb-ros in ~/ROS/packages/ardrone_tools.
April 5, 2013
- Connected ardrone_slam to the AR.Drone 1.0. The warning is correct, in test_drone_connection the size 104, in vp_com_socket the size is 112.
Program crashed after 'Start thread_academy'. Started debugger, crash is in video_com_multisocket_stage_open() in the call video_com_stage_register.
Checked cfg->configs. The structure cfg exist, cfg->configs[0] could not be evaluated. I switched off WIN32 of adronewin32 to check if this origin for the size difference.
- Added a hack and added 8 bytes to the struct in test_drone_connection, which seems to work. Added getDroneVersion in test_drone_connection, which is 1.11.5.
- Added prints to video_stages. 8 stages are correctly added, but the pipeline has a bad name. Also fifo is bad pointer.TBC
April 4, 2013
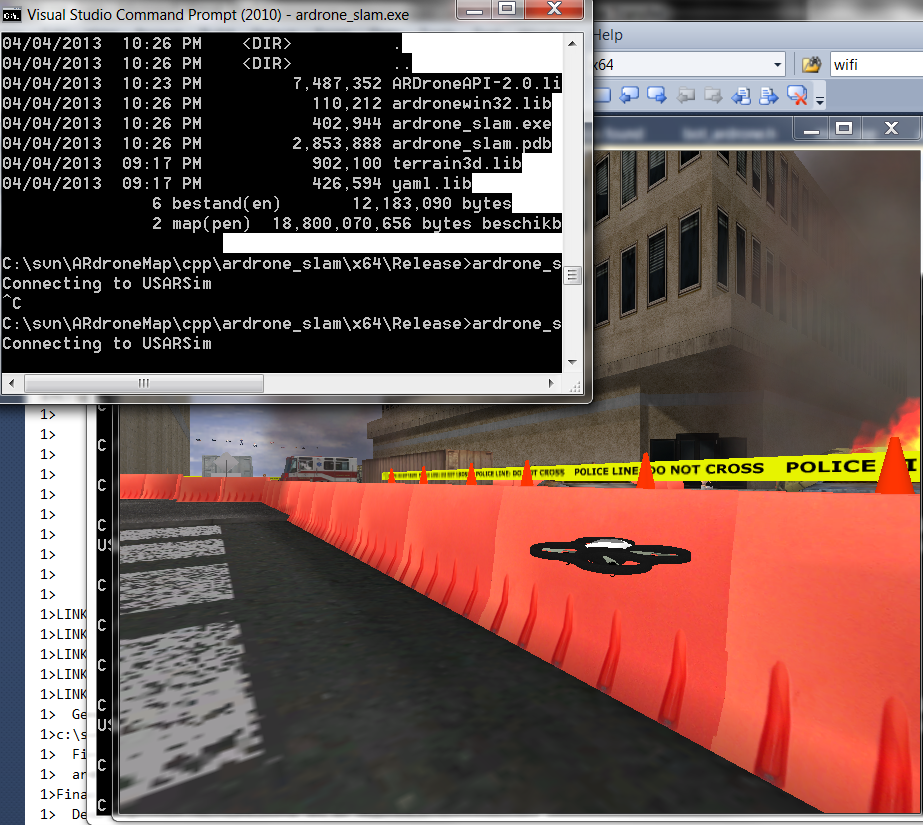
- Was succesfully able to control an ARDrone in UT2004-USARSim, as indicated in my Rescue Labbook.
- Continue with ardrone_slam. Seems that I tried to make a 64bits version, after the 32bits version crashed. 47 linking errors to fix.
- Changed openpgm to build64: still 47 linking errors.
- Made also terrain3d and yaml 64bits. All linking errors solved (373 warnings :-). Removed some errors in project-files: 353 warmings and 5 errors. 4 were Intelligence errors which were easy to solve. The last one is a VCMessage which suddenly failed. Has nothing to do with trailing \ in Output-dir. Changed terrain3D from /MT to /MD. Error was that I put a trailing behind the target (creating a directory called ardrone_slam.exe :-).
- Get the serious warning: "1>c:\svn\ardronemap\cpp\ardrone_slam\ardronewin32\ardrone_tool_win32.c(463): warning C4789: destination of memory copy is too small". config_wifi.c is in ARDroneAPI-2.0, and loads vp_com.h from C:\svn\ARdroneMap\ARDrone_SDK_2_0\ARDroneLib\VP_SDK\VP_Com/vp_com.h. ardrone_tool_win32 loads the same (different compilers options?). As long as I do not connect to a real ARDrone the program works fine:
- Added print-statement of the size of the structure in both functions. Also made the connection to Usarsim, but the function is not called in simulation. ARDroneSlam seems to work (although the program crashes when I start visual slam, but the option -ResX=176 -ResY=144 does not seem to have an effect for ut2004.exe. Should try do it manually:
March 24, 2013
- Tried to install the ardrone_tools from bitbucket. Failed on missing ssh-key. Copied my id_rsa from nb-udk. Added this key with command ssh-add ~/.ssh/id_rsa. I see with ssh-add -l now two ids: physar@gmail and id_rsa. Still the clone fails.
- First logging in with ssh -T git@bitbucket.org solves the issue.
- Created ardrone_tools (25 packages) with 0 errors.
- Continued with Gazebo setup. Checked if gazebo was installed correctly (by footlose). Starts up nicely (except a warning about sun and groundplane manifest)
- Continued with installation, did rosmake for adrone_joystick, joy, cvg_sim_gazebo_plugins, message_to_tf.
- Failed on starting package gazebo/gazebo. Tried rosmake gazebo, but ros is not gazebo aware.
- Did rosws set --svn simulator_gazebo https://code.ros.org/svn/ros-pkg/stacks/simulator_gazebo/tags/fuerte. This fails on missing package driver common, so also did rosws set --svn driver_common https://code.ros.org/svn/ros-pkg/stacks/driver_common/tags/fuerte. rosmake driver_common, but simulator_gazebo fails on missing resource protobuf. Should I do rosstack profile && rospack profile.
- Start from scratch, installed a fresh version of ros (groovy version - Dec 2012). Performed sudo apt-get install ros-groovy-desktop-full
- Made a directory ROS-groovy next to ROS-fuerte. Did rosmake ardrone_autonomy and ardrone_tools. Continued with rosmake ardrone_joystick and joy.
- rosmake cvg_sim_gazebo_plugins failed. Tried apt-cache search ros-groovy | grep gazebo, followed by sudo apt-get install ros-groovy-simulator-gazebo, but got answer that simulator-gazebo is already latest version.
- Back to fuerte, and did sudo apt-get install ros-fuerte-simulator-gazebo.
- Now roslaunch cvg_sim_test outdoor_flight works. Unfortunatelly, the drone publishes images, but doesn't subscribes on control messages. Did rosrun ardrone_tools main.py -sim -n ''. Tried also rostopic pub -l /ardrone/takeoff std_msgs/Empty but no response. Seems that the coupling with ardrone_autonomy is missing. A remake of ardrone_autonomy and tum_simulator (which I didn't do after the installation of simulator_gazebo) solved the issue.
-
- Continued with Paparazzi Installation. First did sudo add-apt-repository ppa:paparazzi-uav/ppa, followed by sudo apt-get update and sudo apt-get paparazzi-dev paparazzi-arm-multilib.
- Made a directory ~/develop and git clone https://github.com/RoboticaTUDelft/paparazzi.git, as indicated in AR.Drone2 getting started. Make failed on call to usbd_init in sw/ext/luftboot/src/luftboot.c:463. Checked Black Magic site to see if there is a newer version. Couldn't really find where luftboot is based on (seems to be stm32). Removed luftboot directory from ext/Makefile. Now lpc21iap could be build.
- Started paparrazi. Selected A/C = ardrone2, target=ap, session=ARDrone2 Simulation. Clicked on build, but make complains that c is unknown command. Defined in the environment CC, but still the Paparazzi Center failed.
March 23, 2013
- Created folder Publications/UvA at https://uascompetitions.projects.nlr.nl
- Received sonar range sensor (MB 1340) from maxbotix.
Sensor has range from 20cm to 765m. Opening angle is depended on the size of the obstacle. Plot C indicates an opening angle of 22 deg (tan^-1 (2/5)).
- Following instructions at ardrone_tools wiki.
- Instead of command deb http:///packages.ros.org/ros/ubuntu quantal main" > /etc/apt/sources.list.d/ros-latest.list I followed instruction of FootLose: start with http://www.ros.org/wiki/groovy/Installation/Source.
- Did sudo apt-get update, followed by sudo apt-get install python-rosdep python-wstool build-essential.
- Now I could do sudo rosdep init and rosdep update.
- Did sudo apt-get install python-rosinstall python-rosdep python-pygame, but all packages were already up-to-date.
- Followed with step 2. Only rosws set ~/ROS/packages didn't work (missing workspace). After executing source ~/ROS/setup.sh there is a ROS_WORKSPACE in the environment, and rosws set ~/ROS/packages works.
- Received in step 3 some warnings about directories without manifest (suggesting to remove them).
- Installed the drivers of Linksys AE1000 from source (downloaded from Romean forum).
- Did lsusb and the Linksys card was visible (with Ralink RT3572 chips). Followed instructions from Fedora Forum. The card was already working, with identity ra0.
- Still, I couldn't select my connection from Network Settings. Did wslist ra0 scan and saw several ESSIDs.
- According to Linux journal, the command sudo iwconfig ra0 essid ardrone should select the access point you want. sudo iwspy ra0 indicates that this interface doesn't support wireless statistics collection.
- Try to find a more recent driver from a more trustable source. Found wikidevi with links to several driver pages.
- Thanks to the wayback machine I Found out that Mediatek just wanted my name and email. When you provide thos I received a bz2 file with version 2.5.0 of the code. Conflict with the Mint-update I did in the background, so I should try again when update is ready.
- With the latest software, ra0 is no longer visible. No other ethernet device is visible. Created /etc/modprobe.d/rt3572sta.conf and could do sudo modprobe ra0, but to no avail.
Strange enough, also the blue light on the card was no longer visible. Tried it under Windows. After installing the drivers from the CD, I could connect to the PZA_UAV and ardrone2. The blue light is back, and flashes when information is send over the link. Started Linux again, the bleu light keeps burning, but still no wireless device visible. Note that there is both a Network and Network Connection configuration screen.
- Tried to install an wireless frontend from 2009, but the compilation failed.
March 3, 2013
- The lab in Zurich uses as middle-layer MAVLink, which has a very lightweight message protocol allowing to use both ROS and LCM communication layers (From PixHawk paper.
February 19, 2013
- Searching for articles which cited Birsteau et al., I found three interesting articles:
February 18, 2013
- Working on the Iran Open 2013 Team Description Paper. Published our first TDP on my page. Found a nice overview of aerial competions. The WaybackMachine didn't had the page http://www.as.go.drl.de/MAV2005 about the 1st US-European Competition and Workshop on Micro Aerial Vehicles Garmisch-Partenkirchen, Germany archived. The Wayback machine had more about http://www.us-euro-mav.com, which was also used for the 2006 competition. I found the CFP of MAV2005.
- Found a nice overview article about Vision based navigation from 2005: nothing new in our approach.
February 5, 2013
- Should check the Paparazzi control as developed by TU Delft.
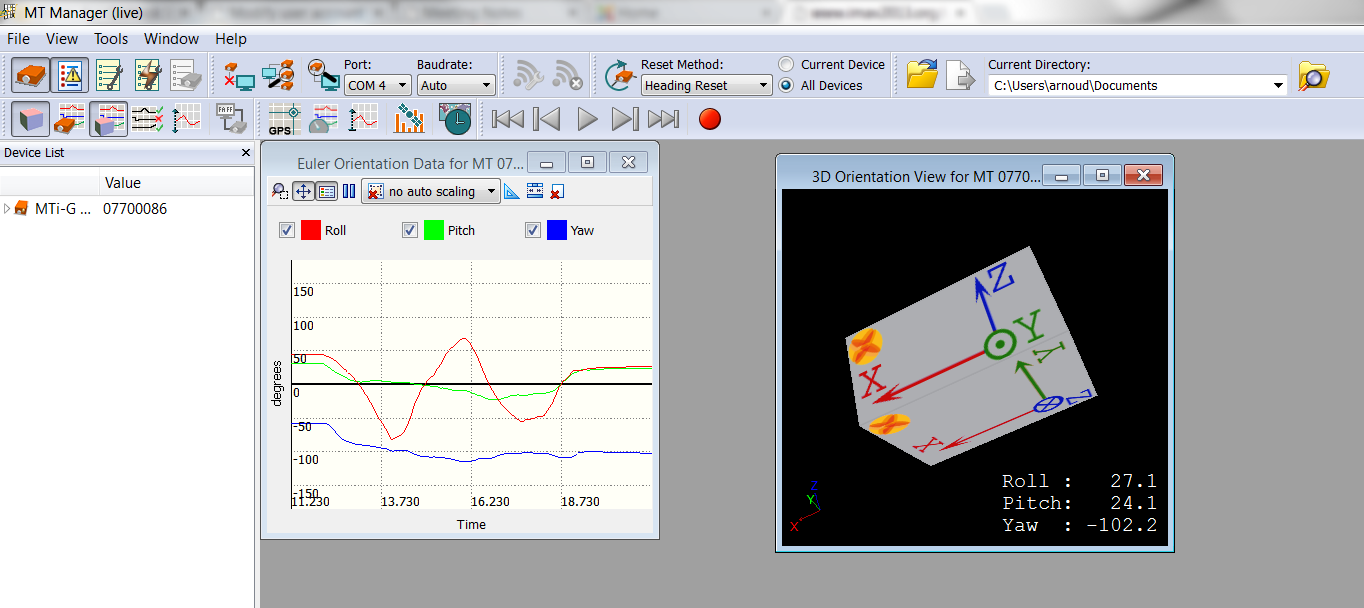
- Installed the MT Software Suite at nb-unreal. Skipped the 2008 Redistribution (not detected, but asked for repair / removal). MT Manager works:
 .
.
- Checked the Magfield Mapper. This is a callibration tool which should be used once the sensor is mounted. The tool is not reachable anymore as plugin from the MT Manager. When executed standalone the usb-connector sensor first has to be disconnected, otherwise the Magfield mapper cannot connect to the Motion Tracker.
Previous Labbook
Related Labbooks