Started Labbook 2015.
December 24, 2014
- Matlab points to the RWTH Toolbox for the NXT. For the new EV3 hardware there is Matlab hardware support. Yet, the add-on seems only to be installed from Matlab 2013 or above.
- Nice comparison of EKF vs Fast-SLAM from Collier.
December 17, 2014
- Looked at the robotics program at Edinburgh. They have three robotics courses:
December 9, 2014
- Exercise 5 of the ETHx-course is equivalent with the AMR assignment 4. Should look at their code (and solution).
November 26, 2014
- Checked the EDX-course, including video's. Part I and part II are concluded with a quiz. Claim that they could execute interactive matlab-code, yet this doesn't work for me.
- Our exercise3 is not on EDX. Instead they do localization on line-detection.Should look if some of the Matlab support function are relevant for us:
November 25, 2014
- MathWorks report that the problems of 'linuxvideo' are a known bug, without work around.
- Started a virtual V4L driver with command sudo modprobe vivi, but this device doesn't show up in imaqtool.
- Tried some of the V4L test-applications. Checked out the v4l-utils in directory ~/git/v4l-utils. Did a make install. Checked qv4l2 (which gives a good image (using the uvcvideo driver). Did the test v4l2-compliance, which did 39 test (4 failed). Yet, many test returned OK (Not Supported)
- The command v4l2-ctl --list-devices shows that vivi is active as device /dev/video1. The command v4l2-ctl -l gives a list of all controls (i.e. brightness, contrast, hue, gamma, sharpness, etc), including their current value.
- Also did v4l2-compliance -d /dev/video1. The vivi-driver had an additional capability ( Read/Write, next to Video Capture and Streaming). So, 93 tests were done (18 failed).
November 24, 2014
- Looked at InitCamera.m. Installed missing formats of the Image Acquisition Toolbox ({'dcam' 'gentl' 'gige' 'linuxvideo'}). Replaced winvideo with linuxvideo. InitCamera.m now complains that RGB32_640x480 is not one of the supported formats. Available formats are all in YUYV color-space. Should try to use YUYV_640x480. Now it continues, but complains that the device (my webcam) maybe in use. Should try it with a USB-camera.
- Attached the Sweex usb-camera to nb-ros. It is device 1 (webcam is 2). It supports two formats (BA81_160x120 and BA81_176x144). Replaced two lines in the code to a bit more general implementation:
videoinfo.DeviceInfo(1).SupportedFormats';
format = videoinfo.DeviceInfo(1).DefaultFormat;
Same error (device is in use).
- Used the Logitech sphere. Supported formats are YU12x160x120, YU12_320x240, YU12_640x480. Still, device is in use.
- Tried the instructions from matlab help:
obj = videoinput('linuxvideo,1)
videoinput now complains that /dev/video2 cannot be opened (which is correct, the webcam is on video0). Camorama can easily display the webcam.
- Read the matlab troubleshoot pages. Used imaqtool, which indicate that the uvcvideo driver v3.13.11 is used.
- Read the FAQ of the uvc-drivers. My webcam is from Microdia, and according to lsusb the device has idVendor 0x0c45 and idProduct 0x644d. The commmand lsusb -d 0c45:644d -v gave several '14 Video' lines, so it is a real uvc device.
- The three cameras all use another adaptor driver (pwc, uvcvideo and sonixb). All gave same error in imaqtool.
- Tried to include the support for the older Video 4 Linux 1 devices with the command LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libv4l/v4l1compat.so matlab, yet still same error.
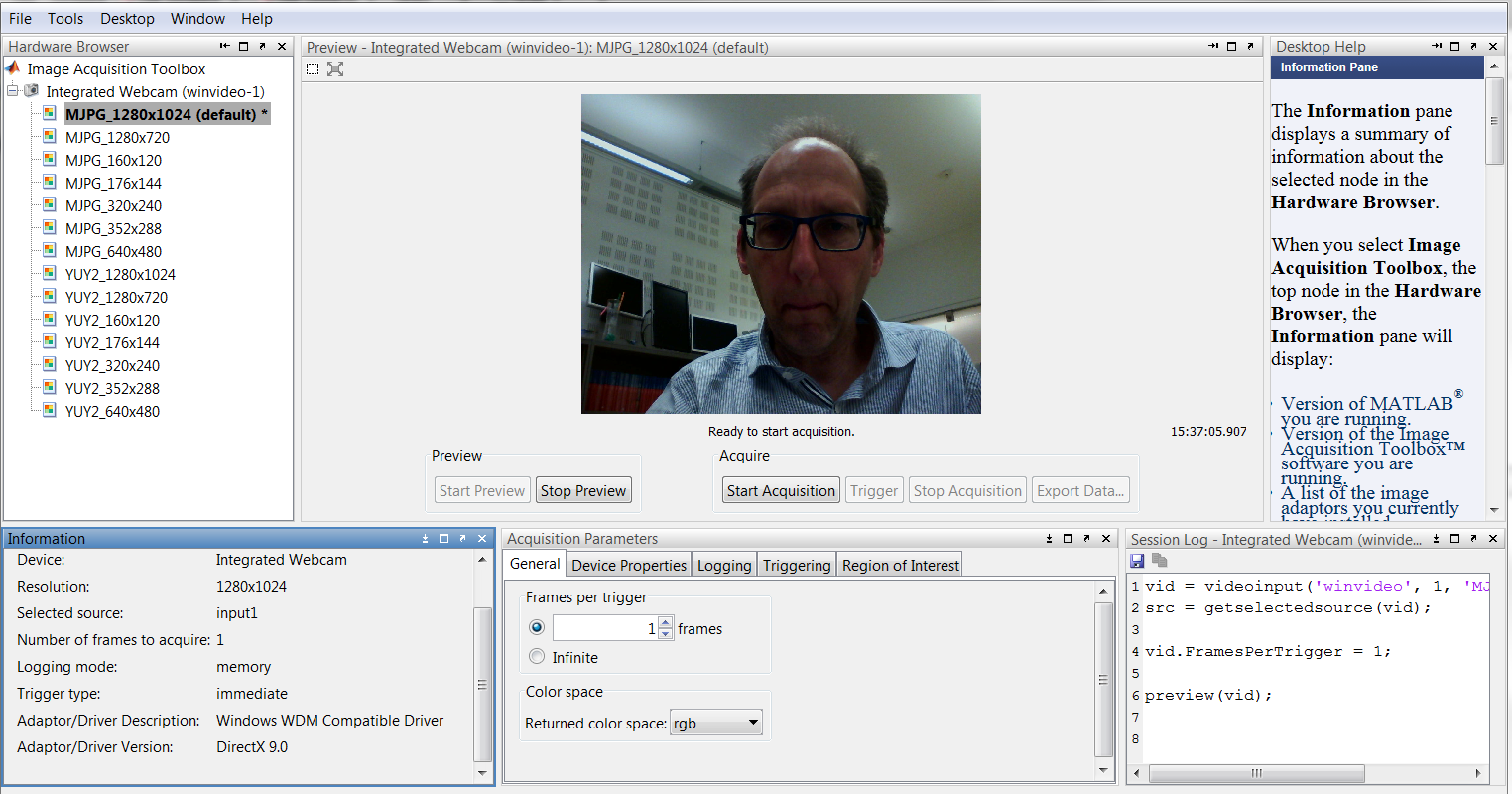
- On Windows, the imaqtool works fine, while it fails under Linux:

November 18, 2014
- The Linux-server mremote will be discontinued on December 15. Copied all my
AMR files from mremote to u033089.uwp.science.uva.nl (Jose). Other choices are
- Quax u030334
- Diertens u031061
- Jaap u022471
- u040291
- u040287 (could not login)
October 27, 2014
- Found back the Theta camera, the plexiglas and a Logitech webcam (from Sander?).
- Upgraded the Windows Theta program from 1.6.1 to 1.8.0. Updating the firmware from 1.21 to 1.30.
- On nb-ros, I received a list of files with the command env LANG=C gphoto2 --debug --debug-logfile=my-logfile.txt --port=ptpip:192.168.1.1 "--camera=PTP/IP Camera" -L.
- With the command env LANG=C gphoto2 --debug --debug-logfile=my-logfile.txt --port=ptpip:192.168.1.1 "--camera=PTP/IP Camera" -p=155, I received R0010246.JPG:
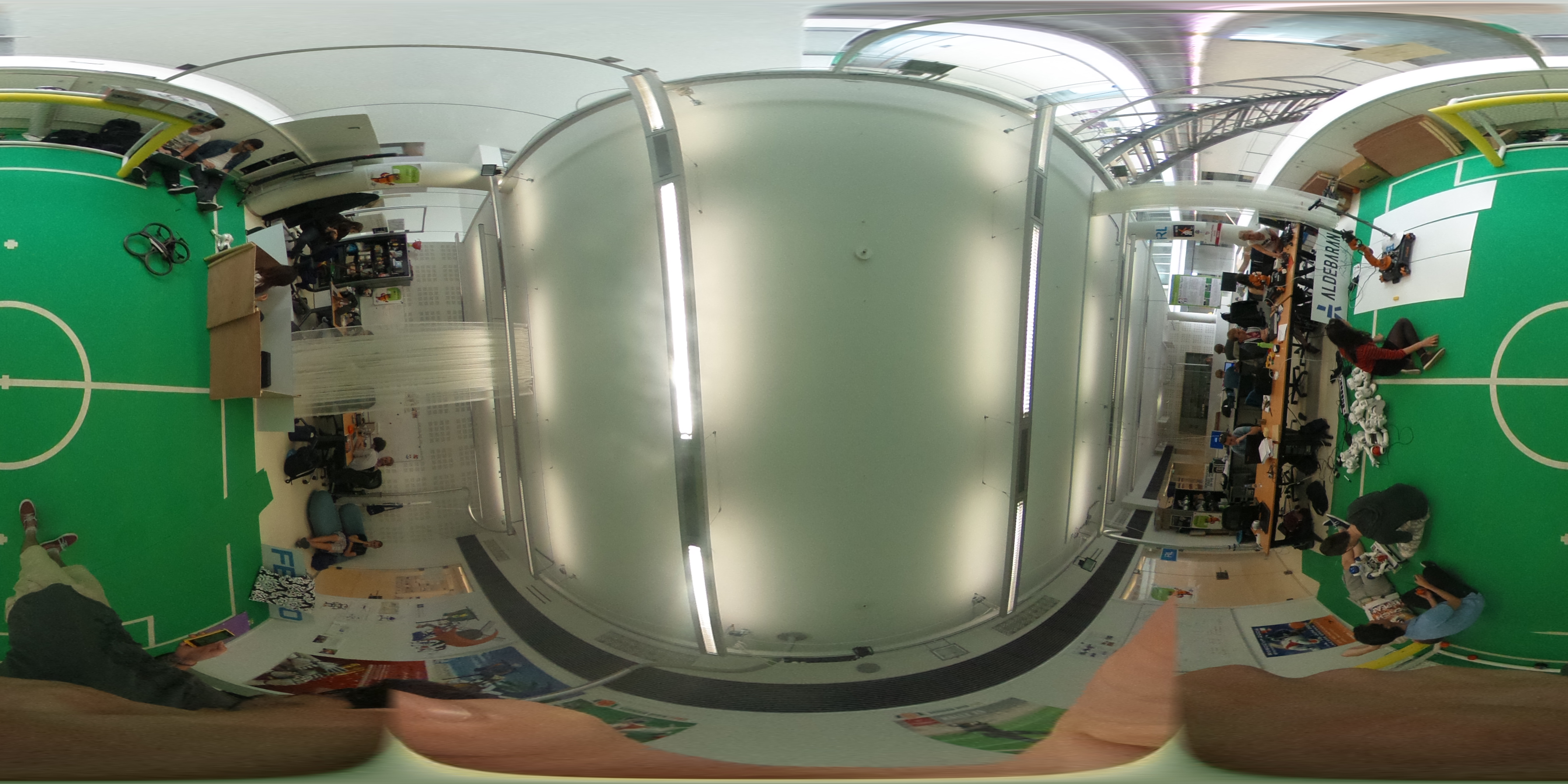 .
.
- Created a Matlab profile, associated both the RoboCup as my UvA account to this profile. Downloading R2014b on nb-ros. Matlab is installed in /usr/local/MATLAB/2014b. Installation has to be done as su. Downloading several Matlab packages (Matlab 8.4, Simulink 8.4).
- Call unix('gphoto2 --debug --port=ptpip:192.168.1.1 -p=155') works, but gives extensive print statements, so the --debug-logfile option is needed :-). The JPG is delivered in the current directory. A second call failed because the connection was not availabe (later I got the request to give a password for the wireless connection to the Theta).
Previous Labbooks