Started Labbook 2018.
December 29, 2017
- Continue with the fourth chapter of Intelligent Behavior in Animals and Robots. McFarland gives an example of sterotype behavior (described by Tinbergen) of a greylag goose, which finishes always its egg-retrieving behavior, even when it it halfway looses contact with the egg.
- McFarland not only mentions the cost of being in a particular state (even doing nothing costs energy), the cost of performing a particular activity, but also assigns a cost to change between activities.
December 28, 2017
- Continue with the third chapter of Intelligent Behavior in Animals and Robots. McFarland indicates that Hobbs was a materialist, which explained everything originating from physilogical processes as pain and pleasure, which gave rise to emotions and influenced behavior. This was picked up by utilitarians, such as John Stuart Mill (1861). Did they evoluate into behaviorists (early twentiest century), who tried to measure the effect of pleasure and pain (i.e. Pavlov)?
- Bernoulli was responsible for what is now called diminishing marginal utility, which means that money is the universal standard, because it is for some more worth than others. Bernoulli (1738) suggested to couple it to moral worth or well-being. That lead to the theory of choice from Savage (1954) based a preference for the overall highest utility. Yet, Edgeworth indicated that the total utility is not a simple sum, but a combination of indifference curves. Pareto worked this further out.
- McFarland makes a parallel between economics and ethology. In ethology the decisions are evaluated based on costs (instead of utility). Every individual redecuces costs based on an objective function, if that objective function is well trained (by evolution), it is equal to the cost function (which is a characteristic of the environment, not of the individual or species).
December 27, 2017
- Continue with the first chapter of Intelligent Behavior in Animals and Robots. At page 21 McFarland claims that cognition involves declarative knowledge, worked out in Chapter 6, because if the situation could be automatically into sign stimuli, which makes a reflexive or behaviorial solution is possible.
- To create intelligent behavior, reasoning has to be coupled with meaning, which requires language.
- Yet, honeybees also have language, and even dialects. One waggle indicates about 5 meters to an Egyptian honeybee, about 25 meters to an Italian bee and 75 meters to an German bee.
- Many aspects of human behavior do not involve cognition: spatial orientation is sophisticated, prewired adaptive control system (Howard 1982).
- Unfortunatelly, only a summary but no questions at the end of the chapter.
-
- Chapter 2 is about rational behavior: a rational person should be able to muster a good defense of a belief when the occasion demands, yet not every belef is under constant or conscous deliberation.
- Ordering is easier from big to small than from small to big. Measured in humans, children and monkeys.
December 21, 2017
- Read the introduction from Intelligent Behavior in Animals and Robots, which is actually from 1993. There the point one of the founders of Cognitive Psychology, George A. Miller, with his test-operate-test-exit (TOTE) architecture, which is claimed to be influencial for AI (up to 1993). Note that Muller was also one of the inventors of WordNet.
- According to the introduction, the cognitive approach is equivalent with cybernetics, and was later replaced by BDI architectures, which is according a failure due to Turing's claim on accuntable rationality. According to them that is projection, a primate heritage to require continual assessments of "intentions" (de Waal).
- The first chapter starts with a nice quote: "anthropomorphism is an incurable disease ... - resisting the temptation to interpret the behavior of other agents in terms of our own subjective experience. ... Making robots forces us to address issues that we might otherwise overlook or avoid, and it provides some acid tests for models and theories of behavior."
- Another nice one: "Much human behavior is highly instinctive ..., while much animal behavior is based on learning."
- An example that I can use in the lectures: the evading behavior of a moth based on two different sensors.
- Fig. 1.8 is also nice to use.
December 18, 2017
- Interesting conference, unfortunatelly the week overlaps with the Matlab visit (and the Bachelor day).
- Another interesting conference is ALife, end of July 2018 in Japan.
December 6, 2017
- Looked at the first assignment with DownyJr (offset HipYawPitch). Could connect with Choregraphe. Made connection with robolab wireless.
- Just giving the command python config.py gives the getMainModule().start(): object has no attribute 'start'.
- Followed the instructions and created main.py, still same AttributeError.
- Next step: created globals.py, same error message.
- Last step: registering the modules. After correcting the type of quotes and an extra tab in main.py it works.
- Finished Hello World (part 1). Part 2 is walking, so then I need another robot than DownJr.
December 4, 2017
November 30, 2017
October 17, 2017
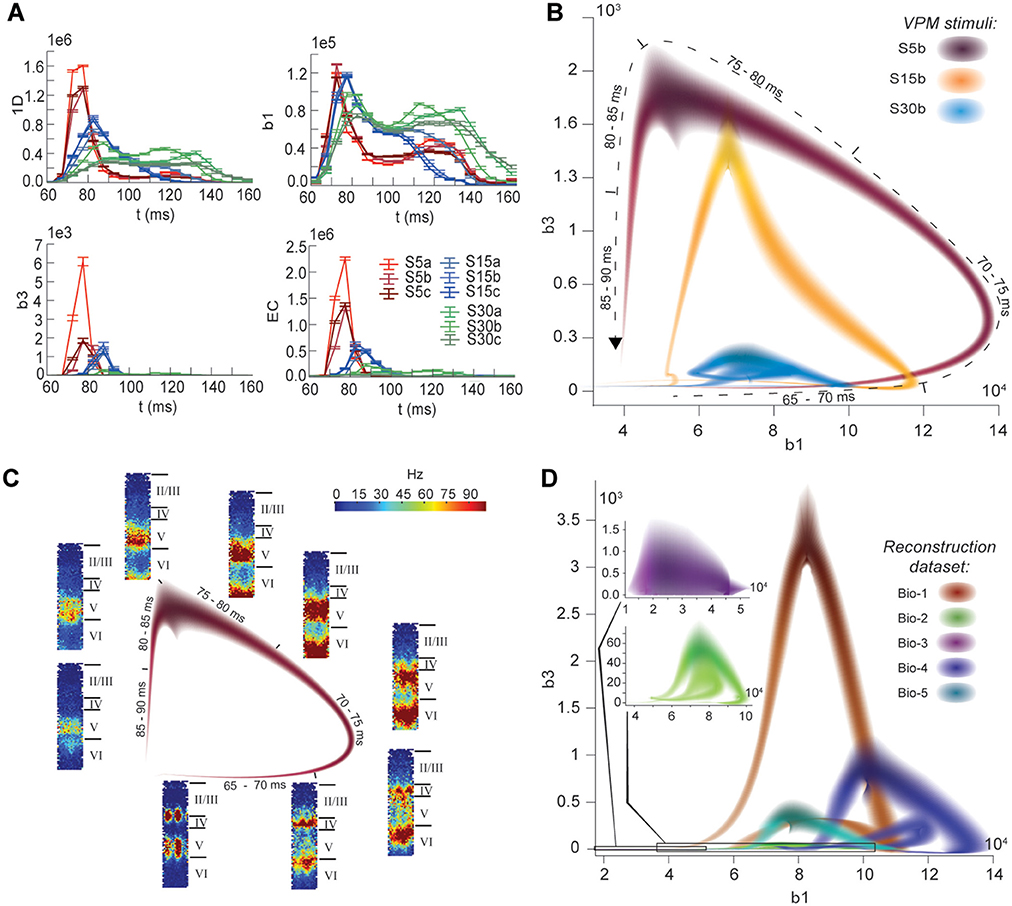
- Found a reference to article of Henry Markram, which combines several groups of all-to-all connected neurons (cliques) to cavities that guide the emergence of correlated activity.
- I most liked Figure S3 in the supplemantary material, which analyzed the Betti number (as indication for the non-connections of the cavities) for C. Elegans. The activity is demonstrated in Fig. 6, where the demonstrate that the Betti number (B_1 vs B_3) changes over time when stimuli are given, indicating that connections are tried (between cliques).
September 18, 2017
August 21, 2017
August 14, 2017
- According to IEEE Spectrum, Facebook, Tesla and eBay are bussy with new Brain Tech devices.
August 11, 2017
July 11, 2017
June 4, 2017
May 23, 2017
May 9, 2017
April 12, 2017
February 9, 2017
February 8, 2017
- If I want to cancel the midterm exam and have a lecture, then there is an empty slot on Tuesday 28/2 from 9:00-11:00 (or 13:00-15:00).
February 2, 2017
- Reading Adaptive Morphology, which give many recent examples for bioinspired locomotion (walking and flying).
January 31, 2017
- Reading Lessons from Animals and Plants, which refers to the MIT book How the Body Shapes the Way We Think.
- The preface of the book points to the site , but this redirects to a Turorial on Embodiment.
- The section about Connectionism could be the start of a nice question. Connectionism is only mentioned on p. 47 of Arkin, as alternative bottom-up approach in contrast of the Cognitive psychology of Neisser and the information approach of Eyseneck.
The section points to Hofstadter, which Waking up from Boolean dream, or, subcognition as computation raises some interesting questions. Overall, Hofstadter sees that in principel cognition can be seen as computation, but that the metaphor is off. This in contrast with Searle's never (Chinese Room argument) and Simon & Newell nearly, with their Physical Symbol Systems Hypothesis from Cognitivism.
- The most recent psychological trend is Enactivism. Di Paolo, in Horizons for the enactive mind: Values, social interaction, and play towards (Beer 2003; Brooks 1991; Harvey et al. 1996; Nolfi and Floreano 2000; Winograd and Flores 1986).
- Lessons from Animals and Plants, points to the Yale book Simplexity, for elegant simplification mechanisms in neural circuitry of some human sensory-motor loops.
January 26, 2017
- Was looking for the video of the drones flying in formation through windows, but couldn't find it. Payed a visit to Jurgen's visual navigation course.
January 25, 2017
- Read "Dimensions of communication and social organization in multi-agent robotic systems", from Arkin and Hobb, which was refered on page 360 (chapter 9).
- In Section 2 Arkin claims that Schema Theory is based on the cognitve theories of Normal and Shallice & Niesser.
- Section 3 is the relevant part, discussing the examples also found in the book, but now clustered in five areas:
- system reliability
- social organization
- communication
- multi-agent searching
- coordination
For the coordination, Arkin describes lekking, coming together in a a communal breeding display on a lek, where each male defends a small territory in order to attract females.
January 19, 2017
- Scanned Coloured Circle Pattern, because the 2 Blobs from Duncan had the right colour, but other colours (no green):
- Tried to find the pattern of the Aibo ERS7 station marker, but could find any. Could only one functional Aibo charger. Tried Carlos and Lewy to perform homing, but only Mina didn't crash after standing up. Yet, Mina is the Aibo with the broken leg, and showed the following error-message on her face when commanded to walk:

- With an other battery Carlos was able to start the homing behavior (but crashed before reaching the charing station because the battery wasn't fully charged).
January 18, 2017
- The attendance at the Tuesday lectures (no practicum that day) were low. Should combine that in the schedule next year.
- Checked for hybrid videos with the architecture chapter (chapter 12) of the Handbook, but only one on shopfloor automation.
January 17, 2017
- Video ID 34 of chapter 13 is about the Nerd Herd (but unfortunatelly the same bad qualitity as I have in my presentation).
January 14, 2017
Each chapter also has a video page:
January 13, 2017
- No access yet to
- Francois Michaud and Monica Nicolescu, 'Behavior-Based Systems',
Springer Handbook of Robotics,
2016, pp 307-328.
- Fumiya Iida and Auke Jan Ijspeert, 'Biologically Inspired Robots',
Springer Handbook of Robotics,
2016, pp 2015-2034.
- Patrick van der Smagt, Michael A. Arbib, Giorgio Metta, 'Neurorobotics: From Vision to Action', Springer Handbook of Robotics, 2016, pp. 2069-2094.
Also added:
- The Handbook is available via EBSCO.
- Read the Roboethics chapter. Learned to distinguish:
- robotics ethics, which indicate the good from the bad robotic developments (to enhance humanity and human welbeing),
- robot ethics, the guidelines what are actions with good or bad consequences when executed by robots, and
- robots' ethics, the morality self-conscience robot race should have.
- Roboethics is closely related to computer ethics, so it should also provide answers on privacy, accuracy, property and accessibility (PAPA).
- At the World Robot Conference in Fukuaka, Japan, 2004 the World Robot Declaration was issued:
- Next-generation robots will be partners that coexist with human beings.
- Next-generation robots will assist human beings both physically and psychologically.
- Next-generatin robots will contribute to the realization of a safe and peaceful society.
January 12, 2017
- Google car obstacle avoidance: Woman chasing a duck, one of the cases encountered by the Google car.
- Watched an early video of Stanley, looking for the learning the color of the road snippet. It is present, but only on the parking roof (not the later dirt-road / grass example). The vision_straightroad seems to be dedicated to this method.
- Related to Pengi and playing video games, we also have the recent DeepMind playing PacMan.
- One Mac-user had problems with Homebrew Science installation. Alternative could have been to use directly brew install homebrew/science/opencv, but the Mac-user found out that the problem was that her computer was not connected to the internet (that why she got an git-login error).
January 11, 2017
- The access points at c3.161, c4.201 and c4.159 now all send the ssid robolab, and accept the 802.11k and 802.11v protocol. The robolab is now visible with the Ralink stick in nb-ros.
January 10, 2017
- Patterson also have ralink.
- Connected ralink-card into nb-ros. Card was recognized and configured: dmesg | tail:
[22623.101859] usb 3-1: New USB device found, idVendor=148f, idProduct=3070
[22623.101864] usb 3-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[22623.101867] usb 3-1: Product: 802.11 n WLAN
[22623.101869] usb 3-1: Manufacturer: Ralink
[22623.101871] usb 3-1: SerialNumber: 1.0
[22623.308038] usb 3-1: reset high-speed USB device number 5 using xhci_hcd
.
- The message indicated that both 2.4 and 5.8 GHz was enabled, but the SSID robolab is not visible for nb-ros. dmesg:
[22403.778584] cfg80211: (start_freq - end_freq @ bandwidth), (max_antenna_gai
n, max_eirp)
[22403.778589] cfg80211: (2402000 KHz - 2482000 KHz @ 40000 KHz), (N/A, 2000 m
Bm)
[22403.778593] cfg80211: (5170000 KHz - 5250000 KHz @ 40000 KHz), (N/A, 2000 m
Bm)
[22403.778598] cfg80211: (5250000 KHz - 5330000 KHz @ 40000 KHz), (N/A, 2000 m
Bm)
[22403.778602] cfg80211: (5490000 KHz - 5710000 KHz @ 40000 KHz), (N/A, 2700 m
Bm)
[22403.778605] cfg80211: (57240000 KHz - 65880000 KHz @ 2160000 KHz), (N/A, 40
00 mBm)
- Also tried the ralink card in my Windows machine. Couldn't find robolab. Could manual add the SSID by Network Center->Add connection (top) -> Manual (third option). Still, robolab is not visible.
January 9, 2017
- Sebas made a new flash-stick (on the same USB3-stick), and now Carlos and Julia are succesfully flashed. Continued with Mio and Baratheon.
- Accessed the webinterface with http:nao.local. Alternative is avahi-discover.
- Set wireless without problems for Julia, but for Mio the connection was hanging on the wizard/network. Accessed advanced pages and did a naoqi-reboot. Still same problem, probably through the browser cache. Instead did a ping nao.local and accessed the webinterface with the given ip-adress (for Mio).
- Switched the wireless card inside the head of Baratheon, to see if it could detect eduroam and robolab with other hardware. Still, only eduroam is visible, not robolab. Looked at connman interface. Command connman scan wifi; connman services gives the available connections. The interactive interface connmanctl is not available, so it is difficult to do agent on, as suggested by connman documentation.
- Added without problems Brooke, so only Baratheon gives problems. The wireless card is a Ralink Technology, Corp. RT2870/RT3070 Wireless Adapter (according to lsusb. Carlos, the other v4 robot, has the same Ralink Technology, Corp. RT2870/RT3070 Wireless Adapter. Yet, also Carlos has no ip-adress yet. Berta should be able to connect, but doesn't directly after starting up.
- Copied the wifi_*_726f626f6c6162_managed_psk from Bertha. The * is the mac-adress from the Ralink wireless card.
- Julia, Brooke and Mio directly connect to robolab (Julia with a slightly different ip). Yet, Julia has a different wireless card: Atheros Communications, Inc (Qualcomm Atheros according to lsusb -v).
- According to Linux wireless drivers, there are ath5k, ath6kl, ath9k and carl9170 cards from atheros. The command dmesg | grep -i ath showed that it is a ar6004-card using the ath6kl-drivers. For Bertha it showed usbcore: registered new interface driver rt2800usb.
January 5, 2017
- Succesfully flashed Baratheon with the same stick which failed with Julia.
- Setting the wireless network is problematic on nb-ros, because I cannot select the Country code dropdown down to NL, which seems to be needed to see SSID robolab. Needed multiple failed Connect until finally the connection to SSID robolab was made. Now testing if that connection remains after reboot. Yes, it does.
- Selecting the Country code is possible on nb-ros, with the scroll-wheel (external mouse).
- Julia front button is red, and doesn't respond on a push. Maybe low volume? Try to find if I could find the connection with Choregraphe. The svn-server has v1.3.17, let see if they can find Julia. The Bonjour wizard didn't see any Bonjour printers. Choregraphe only saw the local simulation.
- Used arp-scan 192.254.6.0/24 to scan all ip in the wired connection, but no connection (Should try 256 different subdomains).
- Mean time: flashing Carlos. Also ended in red front-button state.
- Tried arp-scan on Berta (which I could ping), but the scan goes too fast (no packages received). The command nmap -sP 169.254.168.0/24 is better, that one reports: Nmap scan report for 169.254.168.203; Nmap done: 256 IP addresses (1 host up) scanned in 12.83 seconds.
- The command nmap -sP 169.254.6.0/24 (check subdomain with ifconfig), reveiled that the ip-adress is 169.254.6.92. I could ping the system, but I cannot ssh nor access the webinterface.
- There are a number of bhuman heads:
- Nao1: Jenny, a v4 Nao
- Nao2: Downy Jr, a v4 Nao
- Nao5: Carlos, a v4 Nao, marked as bhuman
- Nao8: Baratheon, a v4 Nao
- Nao10, Julia, a v5 Nao has bhuman - player 3.
- Nao11: Brooke, a v5 Nao, marked as bhuman
- Nao15: Mio, a v5 Nao
- There are a number of NaoQi heads which could be used for the course (I need six of them):
- Nao3, Patterson, a v3.3 Nao has NaoQi 2.1.4.13.
- Nao9, Berta, a v4 Nao has NaoQi 2.1.4.13.
- Caitlin asked to leave Jenny and Downy Jr alone.
- Latest version of NaoQi is still 2.1.4.13. Make a flash disk from nb-ros (flasher 2.10 opens a GUI. Couldn't detect the Kingston disks, so used the 15Gb Integral USB 3.0.
- Starting flashing Julia with instructions from mtech
- The software to be installed (last year) is pynaoqi-2.1.4.13.win32.exe, so we are still up-to-date.
- Tried the mac_instruction on nb-ros. After adding export PYTHONPATH=${PYTHONPATH}:~/packages/aldebaran/v2.1.4.13/pynaoqi-python2.7-2.1.4.13-linux64 and DYLD_LIBRARY_PATH=${DYLD_LIBRARY_PATH}:~/packages/aldebaran/v2.1.4.13/pynaoqi-python2.7-2.1.4.13-linux64 to my ~/.bashrc no problems with import naoqi at the python prompt (checked version with python --version.
- Both import numpy and import opencv was already working. scipy still has to be installed. In principal pip install scipy works, but this fails on missing Fortran compiler.
- Installed sudo apt-get install gfortran. Tried again pip install --user scipy matplotlib.
- Probably sudo apt-get install python-numpy python-scipy python-matplotlib was simpler than compiling from source with pip.
Previous Labbooks
{kind=link}