7 November 2007
- Checked the book Robot Cognition and Navigation from Srikanta Patnaik. It is a strange book, mixing theory, pseudo code, program listings, etc in random order. It is interesting because some necessary details that are left for the reader are now worked out. Unfortunetlly, the book does not contain concrete exercises. The book source-code is availabe as zip.
- Checked the missions of the RoboChallenge 2008. The mission consist of autonomously collecting colored balls with a mobile arm. If I create such a space-world, the Talon can be used to collect the balls.
26 September 2007
- Branced of svn://info.science.uva.nl/scratch/svn/Roboresc/edu, and commited new DriveSquare behavior.
- Added ConfigurationBox to control behavior. Tested it with DriveSquare and Autonomous behavior. Autonomous behavior failed in the SoccerWorld, because the laserscanner is higher than the goals! Revision 808
20 September 2007
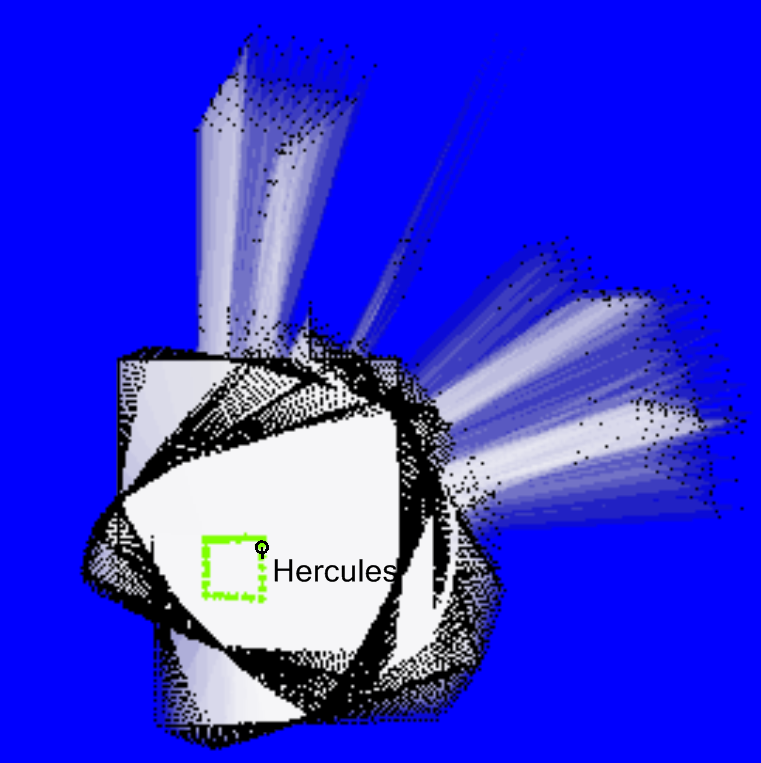
- Finally got the WalkSquare behaviour to work. Odometry is too good, only after a few rounds a slight rotational error is build up.
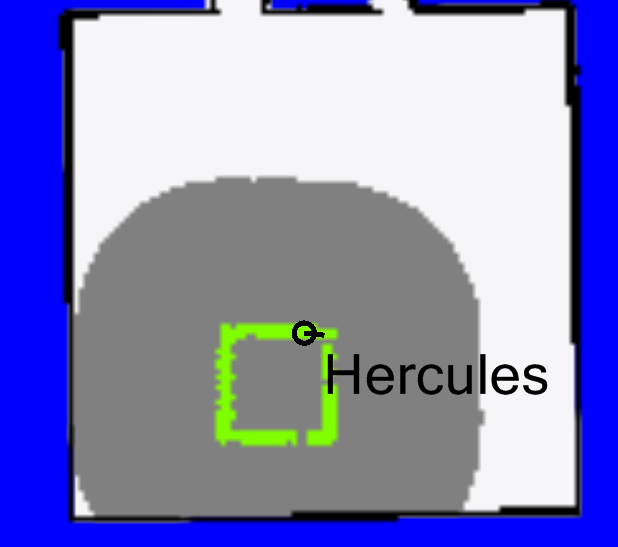
- The odometry is that good, because SLAM does a constant reset of the values. When DeadReckoning is selected as Mapping node, the odometry is reset by its own values. Now some errors are made (first two stretches are ok, then a mistake of 45deg is made). After a full round the robot is (1.37,0.54) from its original position.
- Tried to change EncoderResolution and LateralTireFriction, without any effect. Moving at the DM-spqrSoccer2006_250.bat is a good choice. Error is (1.54,0.58) after a full circle (starting at -1,1,-0.5 with orientation 0,0,-1.5708).
- Looked at photocell used in the Robotics Primer. Seems that this photocell can be modelled with a one pixel camera, with a field of view 180deg. Yet, a camera is completely differently modelled as the other sensors. Looked at BallHSensor.uc, which models a high-level sensor, and IR2Sensor.uc which checks the material-description for Transparency.
- Added ProcessCameraData to WalkSquare behavior, which prints the luma (brightness leaded to arithmic errors) of the pixel 200 of the 76800 to the console. This code is only reached when the ImgServer is started (remember, the camera is no sensor).
19 September 2007
- Looked at the new URBI interface for the Roomba.
- Started with the part 1 of first exercise: driving a square of 2x2meter.
- Started with DM-ValidationTest_250.bat. First spawned robot at the entrance of the simplest room A: 2.432,6.656,-0.5 (theta=0). The goal position is 2 meters away, but the room is too small for driving a square.
- Started in front of room C, but the robot rotated towards the corridor (1.1414,0,-0.5 and theta=2.3561). Now a square of 2x2 meter is possible, but it is very tight.
- Started with DM-MobilityTest_250. Recommended start location 79.38,48.45,1.81. Theta2.3561 looks into the corner, so -1.5708 is the right start orientation.
- Created WalkSquare motion. Added Notify to OdometrySensor. After that the Motion nicely sets the goal at (2,2) after reaching (2,0), only no turn is implemented. TBD tomorrow.