Wishlist
- Agent.GPS
- Out of Memory in CameraData line 146. (Seems to be solved in rev 1927)
- Area calculation and other optimalizations (Partly done (area removed from ManifoldImage:RenderPatch) by merge of Agent\Map with 2009\competition).
- No mobility.tif exist in the file system warning (solved in rev 1930).
- GetGeo info's (already reduced in rev 1927).
- 2009 branch (made)
- Missing Matrix functionality. Chapter 4 of MatLab has a nice overview. Matrix2 has Transpose, Determinant and Invert, Matrix3 not yet. Other basic functions are Identity, Norm, PseodoInverse, EigenValues and Single Value Decomposition.
- The Matrix class contains several functions which are not overloaded yet. Function which are available are (Identity, Zeros, Ones), (Negative, Trace, Equals).
- Improved Matrix-interface. Missing Operation is '\', missing function Minor(row,col).
.
Started Labbook 2011.
23 December 2010
- Thrun's warmup assignment page is gone. Luckely the code and data is still available:
- Call Moos' code with x = partfilterKnownControlOpt('ROAD', 100, 10000, 60, -20). Moos' code uses the function mode, which is only available in Matlab 7.1. Found a replacement at Matlab Central. Unfortunatelly, doesn't work for reals and negative integers. Try Matlab at my desktop. Om my desktop the result is impressive fast. Yet the result isn't along the road!
- For Robrecht's code, first call [sens,response,map] = loadImages('ROAD', 100, 10);, followed by images = PartWrap(response, [60 -20], 10000);. Load images takes ages (but does it finish!). Result; a few particles around correct endpoint, a few around the edges.
22 November 2010
13 November 2010
- I have now a working visualisation, but the Aibo seems to walk to the left, while the observation are displayed to the right. Strange enough, the position of the landmarks according to Radish are not according to the 2003 rules (all landmarks on one site have magneta on top or bottom).
- Extracted pose.log.SRL for ground-truth.
11 November 2010
- Could now read fieldSetup as apriori-map. Changed ManifoldSize when apriori with Shear is read (was also an issue for warmup assignement.
10 November 2010
- Looked at David's code. initializestate.m was missing mcv_MotionIdent and mcv_MotionToMatrixity.
- KF from Juergen seem to work. See the plot until the first mark (green is ground truth):
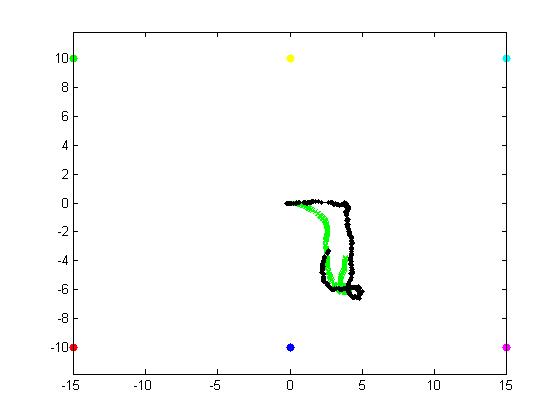 .
.
- Found the following way to convert Juergen's z to David's obs:
for landmark = 1:size(z,3)
if z(1,t,landmark) ~= 0 % if Landmark is measured
obs(1)=t; % huge number, time?
obs(3)=z(1,t,landmark)*100; % decimeter to mm
obs(4)=z(2,t,landmark)*180/pi; % deg to rad
obs(2)=LID(1,landmark) + LID(2,landmark)/10 % signature
plotobservation(obs);
end
end
- Corrected sign in plotobservation.m. Only 10% of the observations are plotted, due to the validation gate. Looked at the result until first mark for ro=2 and ro=20. ro=20 goes well while the Aibo is standing still, but fails afterward. Note that plot for ro=20 the y-axis is swapped with David's plot:
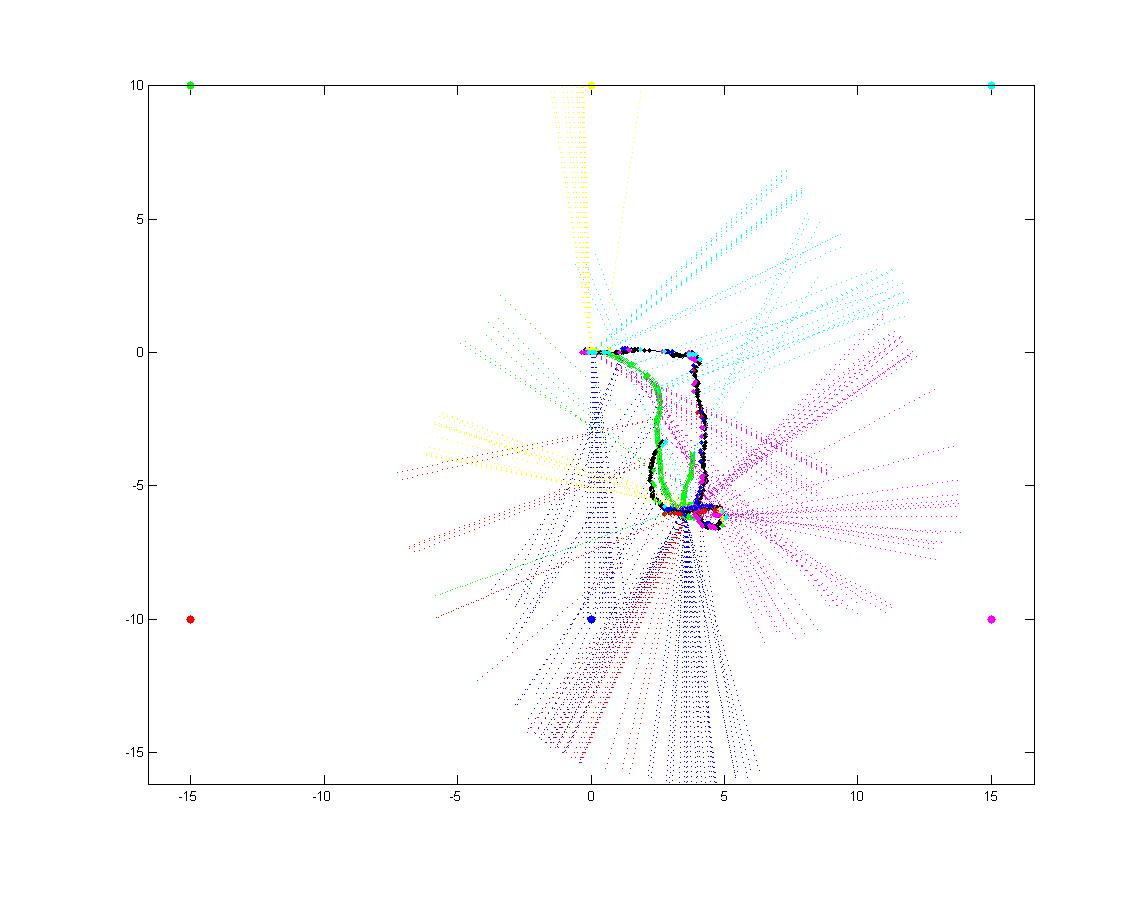 .
.
15 October 2010
- Making the intermediate exam. Exercise 8.8.4 looks interesting, but should be answered by my first. The grading criteria can be found here.
- Also found an interesting assignment from EZTH, where they localize with fingerprints. Essential is to find segments in the laserscan. Luckely, Siegwart also gives a nice comparison of different segmentation techniques.
- Found out that the Sick LIDAR MatLab/C++ Toolbox is now part of ROS.
- Also found a nice overview page for Kalman sofware.
28 September 2010
- With problem 3.8.1.b, you can define the matrix R. But if you use this matrix in the equation of a Gausian, the get the problem that the Determinant is zero (and you devide by zero).
- R = [1/4 1/2;1/2 1].
22 September 2010
14 September 2010
- The students were able to solve 2.8.4 until the factorization of the posterior.
9 September 2010
- There was a lot of discussion about the recursvive use of probabilities in Assignment. Which is missing in my sheets is Bayes rule with background information. Essential is the explanation in Wolfram's lecture after 25 minutes. Here shortly explains equation 2.16 from the book (partly with the remarks as explained before).
3 September 2010
- Tried a merge on UsarLib\Views from assistance to competition, because the AgentController buttons were not coupled to the FlyActor. Quite a merge:
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\MapController.Designer.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\MapController.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\AgentPatchController.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\ManifoldView.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\TeamController.Designer.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\TeamController.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\AgentPatchController.resx (Reverted)
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\ManifoldView.resx
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\AgentController.Designer.vb
Updated: D:\svn\2010\assistance\Usar\UsarLib\Views\AgentController.vb
15 errors. Did a merge of whole UsarLib. No problem with resources anymore, yet 17 errors related with Agent, Patch, ManifoldImage.
- Currently, a move only changes on step. Should set a speed, and the robot should move with this speed. Maybe the Timer_Tick in the TeamController is a nice entry?!
- ClickToImageCoord in ManifoldView (thanks Okke) is also a nice entry to update the simulated AerialImage.
2 September 2010
- Start testing on lecture room. Lecturer's machine has TortoiseSVN and Visual Studio, but no Unreal (yet).
- Starting Solution for the first time gives 23 errors and 16 warnings. Needed to set Avanced Build options to see current configuration. Building the Communication project is enough to remove all errors.
- Experimental has the code to read images (and a much cleaner code). Tried to Merge:
Updated: C:\svn\2010\assistance\Agent\Driver\Driver.vb
Updated: C:\svn\2010\assistance\Agent\Driver\LiveDriver.vb
Updated: C:\svn\2010\assistance\Agent\Driver\LogDriver.vb
Updated: C:\svn\2010\assistance\Agent\Driver\Log Parsing\LineParsers.vb
Updated: C:\svn\2010\assistance\Agent\Driver\IDriver.vb
Works fine, only need an update of the Agent\Sensors:
Updated: C:\svn\2010\assistance\Agent\Sensors\SonarSensor.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\LaserRangeSensor.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\GroundTruthSensor.vb (Reverted)
Updated: C:\svn\2010\assistance\Agent\Sensors\CameraSensor.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\VictimSensor.vb
Added: C:\svn\2010\assistance\Agent\Sensors\TachometerSensor.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\OdometrySensor.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Data\LaserRangeData.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Data\StatusData.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Data\CameraData.vb
Added: C:\svn\2010\assistance\Agent\Sensors\Data\TachometerData.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Data\OdometryData.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Data\RadarRangeData.vb (Reverted)
Added: C:\svn\2010\assistance\Agent\Sensors\Data\RadarSpectrumData.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Base\Sensor.vb
Updated: C:\svn\2010\assistance\Agent\Sensors\Base\MultiStateSensor.vb
Added: C:\svn\2010\assistance\Agent\Sensors\RadarSpectrumSensor.vb
- When first started, the suggested directory for the configuration-file is UsarCommander\Bin\Debug.
27 August 2010
- The building of Thrun's warming up assignment is Mirrilees, on the Campus Drive near Stanford's robotics laboratory. The coordinates according to Google maps is 37.423617 northern latitude, -122.159724 western longitude. Room F1.15 is according to Google maps 52.355357,4.95017.
- Added Iridium and Neodym via projects tab (instead of browse). This couples the correct configuration.
- sensor_all.png can be loaded without problems as priori (although it has no reference). Image is 90 degrees clockwise. The picture is displayed in the lower left quadrant, with scale 1 pixel is one meter. I estimated the scale on 0.25, with the assumption that a car is more less 5 meters long.
- Looked at the Shear-parameter in the world-file. UsarCommander is not using this property. GeoTiffViewer is, as can be seen from the screenshot (for shear 1,-1):
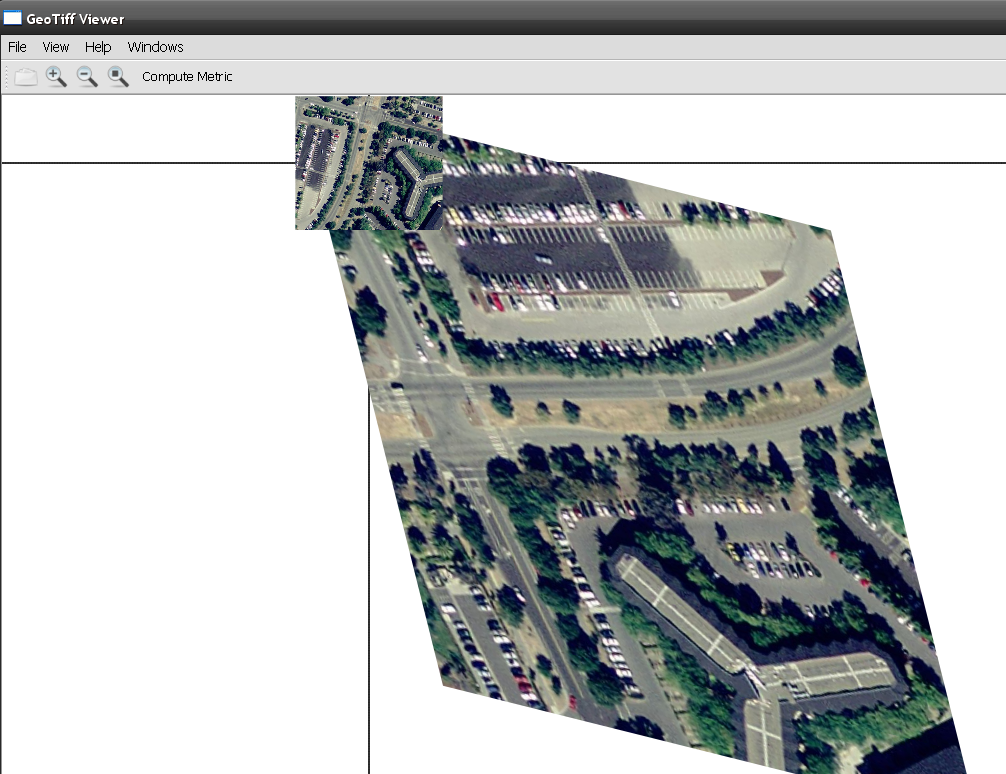
- Moving the xScaling and yScaling zero and moving those values to shear-rows rotates and reflects. In the following picture the upper right are the values +0.25,+0,25, the lower left -0,25,-0,25:

The lower left is equal to the view in UsarCommander.
24 August 2010
- Made a copy of assistance rev. 2141 (April 23).
1 March 2010
Previous Labbooks
{kind=link}
{kind=link}