top-yellow top-green top-blue



bottom-yellow bottom-green bottom-blue
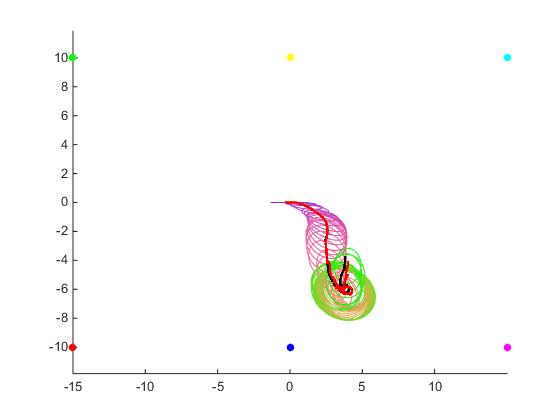

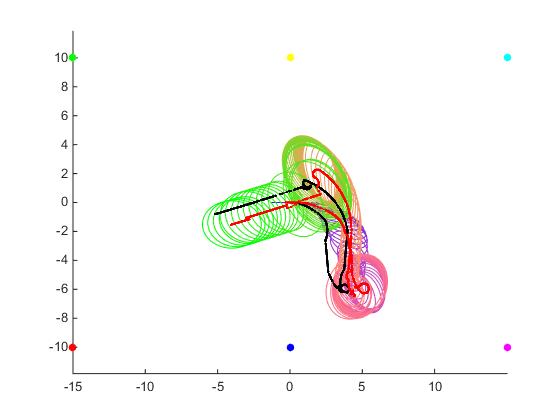


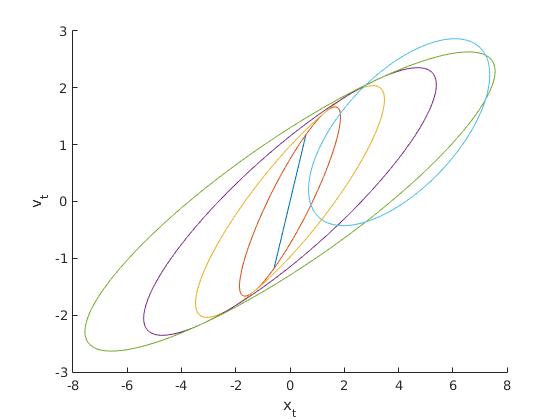
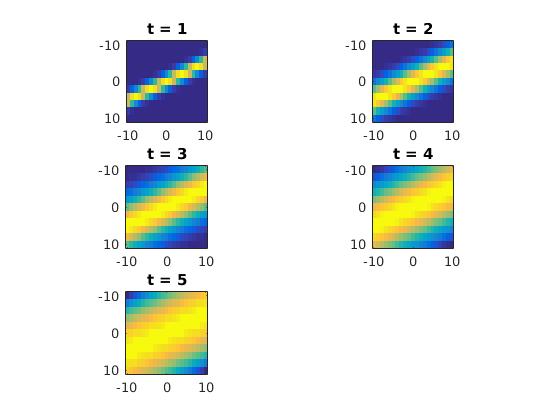
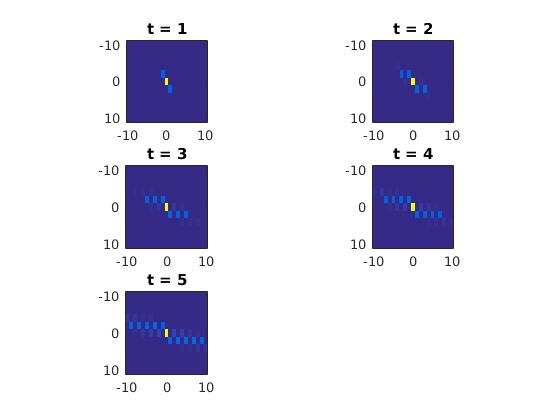
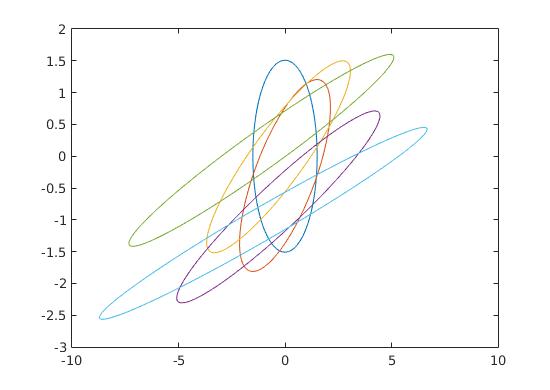
Uit de feedback in de klas begreep ik dat iedereen geprobeerd heeft om de acceleratie in de matrix B en action u_t te verwerken. Dus ze dachten dan dat de acceleratie van de N(0, 1) gesampled moesten worden, en voerden dan een soort simulatie uit. Na de klassikale bespreking snappen ze nu wel dat dat juist niet de bedoeling is aangezien je je belief distributie over de state wel hebben, maar eigenlijk gaf iedereen aan dat ze dat nooit zelf bedacht zouden hebben. Wat namelijk helemaal lastig voor ze is, is om de afleiding te maken dat:
e_t = [1/2 1]' * a_t, waar a_t ~ N(0, 1) => vindt nu R zodat e_t ~ N(0, R)
dan
R = [1/2 1]' * [1/2 1] = [1/4 1/2; 1/2 1], aangezien je moet weten dat
(1) Y = A X + B, X ~ N(m, S) => Y ~ N(A * m + B, A'* S * A')
Dit soort regels kennen ze niet (meer?), ik weet niet of het wel in hun curriculum zit (kennelijk bij Thrun's studenten wel).
Ik denk dat het dus belangrijk is dat we dat volgend jaar als hint bij de opgave zetten.

"Robotics is where Artificial Intelligence collides with the un-sanitized natural world. Up until now the natural world has been winning, and will probably continue to do so most of the time for quite some time."