
|
BIJLAGE:
Denavit Hartenberg conventie
|
Het Denavit Hartenberg model beschrijft de onderlinge relatie van
alle rigid body connections binnen een robot. Elk deel van
de robot door een gewricht verbonden, is afhankelijk van de stand
van de kinematische optelling van alle voorgaande lichaamsdelen
op basis van bijbehorende gewrichtsstanden. Elke vrijheidsgrade wordt
beschreven met ofwel een rotatie ofwel een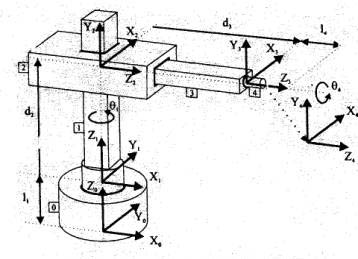 translatie. Elk volgend gewricht in de robotarm is (eventueel
buiten deze vrijheidsgrade om) getransleerd en of geroteerd ten op
zichte van het vorige.
translatie. Elk volgend gewricht in de robotarm is (eventueel
buiten deze vrijheidsgrade om) getransleerd en of geroteerd ten op
zichte van het vorige. De ruimtelijke beschrijving vanuit elk gewricht gebeurt middels een eigen assenstelsel dat dus getansformeerd is ten op zichte van het vorige. Vier waarden beschrijven deze transformatie: theta (rotatie om de z-as van assenstelsel n-1), d (translatie over de z-as van assenstelsel n-1), a (translatie over x-as van assenstelsel n), alpha (rotatie om de x-as van het assenstelsel n). |
|
Externe links: |