Wishlist
- Connection to UsarCommander
- ROS-nodes working for platform, arm, laser scanner and ins.
- Connection to playchess
Xsens MT installed and running on Kuka Youbot(Solved July 19, 2013)
Hokuyo UTM-30LX installed and running on Kuka youBot(Solved July 17, 2013)
Started
Labbook 2015
December 9, 2014
- Modified build/youbot_control_sim/CMakeFiles/youbot_control_sim.dir/link.txt, and sourced this script. Adding /usr/local/lib to the link path and adding the library -llibboost_thread created the executable, but I get a warning that I have a version conflict (boost 1.55 vs 1.46) between hydro and ubunut 12.04.a
- Did an apt-get purge boost-program-options boost-program-options1.46.1. As a result, also all dependent programs were deinstalled.
- Did a fresh install of ros-hydro-desktop-full. Also installed ros-hydro-ros-control and ros-hydro-controllers.
- My other packages also needed ros-hydro-moveit-msgs, ros-hydro-joy, ros-hydro-brics-actuator. Yet, still same error.
- The problem seems to be that another user installed a newer version of boost (1.55) from source. Manually deinstalled that version from /usr/local/lib. Now youbot_control_sim compiles.
- Yet, when I do roslaunch chessboard chess.launch, rostopic doesnot see arm/controller/command messages. In addition, Gazebo crashes after a few minutes.
- Checked the download intel drivers tar-file for ubuntu 12.04 from intel, but executing this script confirms that I have the latest version of all drivers.
- Living dangerously, trying to install the latest (tasty) intel xserver drivers (xserver-xorg-video-intel-lts-trusty).
December 8, 2014
- The command roslaunch chessboard chess.launch still failed on missing base_controller.launch in youbot_simulator. Added ROS/packages to hydro_setup.sh. Still failed. What was missing was source devel/setup.bash in catkin_ws. Now the simulator starts.
- Continued with step 4.1 from Bas document. Yet, the installation of youbot_control_sim fails on boost::program_options.
- Added dependency on boost program_options and thread to CMakeList.txt. The dependence is shown after the catkin_make, yet still the same error occurs.
- Added boost, boost_system, boost_thread to target_link_libraries. Yet, still it fails
November 11, 2014
- Checking the software developed by Bas Terwijn to let they YouBot play chess.
- Activated ROS Hydro by command source hydro_setup.sh. Should add ~/ROS/packages to ROS_PACKAGE_PATH.
- In my catkin_ws directory, I had already youbot_simulation and youbot_description installed. Cloned Bas' chessboard repository with command git clone git://sbt.science.uva.nl/home/bterwijn/git/YoubotChess/chessboard.git.
catkin_make failed on missing pr2_msgs and brics_actuator in the youbot_driver_ros_interface. Added missing packages by command sudo apt-get install ros-hydro-pr2-common and sudo apt-get install ros-hydro-brics-actuator. Also installed ros-hydro-moveit-msgs and ros-hydro-joy. One source file was missing in rockin_atwork, so I move lcm_to_voice to catkin_ws/tmp. Also youbot_driver gave an error, but removing it from the src didn't help.
- The command roslaunch chessboard chess.launch failed on missing base_controller.launch in youbot_simulator. Should try to update this package.
- Updating this package didn't work, because it was a package with the same name but from another location. Moved it to catkin_ws/tmp and installed the package from the mas-group. Now the simulation starts. The chess-pieces are above the YouBot, the fall down after you push the play button (to make sure that they are on top of the robot, independent of the spawn-order).
 .
.
- Updated the youbot_driver. Still an error in base_arm_gripper_test. Moved both youbot_driver and youbot_driver_ros_interface to tmp. Now catkin_ws compiles.
May 19, 2014
- After my Ubuntu 14.04 adventure, nb-ros didn't want to startup in graphics-mode anymore (hanging on battery-state). Could get a terminal with Ctr+Alt+F1, and first tried to install libgnome-desktop-3-2. That one was already fully installed, so I tried (as suggested by ask ubuntu) to reconfigure lightdm (no effect). After that I did install ubuntu-desktop, which solved the issue.
May 9, 2014
- In preparation of ROS Indigo, I upgraded my nb-ros from Ubuntu 12.04 to 14.04. I had to chance /etc/update-manager/release-upgrades setting from never to lts, as suggested in the Google+ community. Got the warning that some third-party entries were disabled, which I could restore with my 'sofware-properties' tool or package manager: this are the packages dell-eula and oobe-dim-disable.
- The distribution upgrade reported an error (could not calculate the upgrade), possible caused by unofficial software packages.
- Following the discussion on askubuntu, I inspected grep Broken /var/log/dist-upgrade/apt.log and received 600 lines.
- Started with the first line, and removed libgnome-desktop-3-2 with command sudo dpkg --set-selections < /tmp/myselection. Didn't work, so followed with command sudo apt-get remove libgnome-desktop-3-2, which removed 17 packages. This helps, only 598 broken dependencies left!
- Removed texlive-base, 82 packages removed. Got an error on the post-installation script of tex-common. There is still a conflict on texlive-base.
- Next is libunity9. This gave warnings from the update-manager (which uses Unity). 596 conflicts remaining!
- Removed libopenmpi1.3. This had a depency on all ros-hydro, ros-groovy and ros-fuerte packages. Removing 421 packages!
- Now the upgrade is possible, 874 packages will be installed, 46 removed, 36 no longer needed, 2137 upgraded. Waiting with the update until Indigo is officially released.
- Installed unity again, no longer a warning. The changes could still be calculated. Benefit seems to be a better GPU support. The name of the release changed from precise (12.04) to trusty (14.04). Difference in Linux kernel is from v3.5 to v3.13. ROS-hydro and Gazebo are not supported (yet) for 14.04
February 12, 2014
February 5, 2014
28 January 2014
- Problem with the yellow platforms (wall_10, wall_11 and wall_12) was that there name started with wall_1 (which is yellow). Renamed them platform.
- Published the map on the workshop site.
- Looking if the Asus Xtion ProLive is working for my labtop. I receive the following messages :
[ INFO] [1390912995.998478004]: 1. device on bus 003:14 is a SensorV2 (601) from PrimeSense (1d27) with serial id '1205290326'
[ INFO] [1390912995.999345422]: Searching for device with index = 1
[ INFO] [1390912996.100110975]: No matching device found.... waiting for devices. Reason: openni_wrapper::OpenNIDevice::OpenNIDevice(xn::Context&, const xn::NodeInfo&, const xn::NodeInfo&, const xn::NodeInfo&, const xn::NodeInfo&) @ /tmp/buildd/ros-hydro-openni-camera-1.9.2-0precise-20140117-2223/src/openni_device.cpp @ 61 : creating depth generator failed. Reason: USB interface is not supported!
- Solution seems to be to use package openni2. Installed ros-hydro-openni2-camera. Could run the code with command rosrun openni2_camera openni2_camera_node.
- Did rosrun datamatrix_finder datamatrix_finder_node 0.133, after doing source catkin_ws/devel/setup.sh and catkin_make install. Once the datamatrix is found, a new ros-topic is published which could be visualized in rviz. To get it working, I had to change the src-file (listen to another topic).
-
- Next topic (Object manipulation). First I had to make an empty youbot.urdf, and make it readable for others. Then I could do rosrun xacro xacro.py youbot.urdf.xacro > ../urdf/youbot.urdf in /usr/local/share/youbot_description/robot
- The moveit-plugin loaded the wrong (groovy) model, because it does find youbot_description in its launch-files. That directed to the directory in catkin_ws/src, not the ones in /usr/local/share. Seems to be even after executing ~/ROS/hydro_setup.sh. Moved all youbot packages from ~/git to catkin_ws/src. Received a controller.yaml and edited youbot_moveit_controller_manager.launch to replace the fake controllers for real controllers. Now we could plan and execute moves in rviz.
- Now trying to control with the moveit-plugin the real Kuka. Directly pluged from nb-ros to the robot (with pc out). Rviz only sees base_link, no other joints. My hypothesis, need to start youbot_ros_interface.
- Hypothesis is correct. Yet, driver complains that it has to be executed as root. Changed the USE_SETCAP option in the CMakeLists.txt. Alternative setcap cap_net_raw+ep ~/catkin_ws/devel/lib/youbot_driver_ros_interface/youbot_driver_ros_interface.
-
- Trying to build win_ros (hydro). The package didn't had clear build instructions. Made a build directory and gave command cmake, but catkin was missing. Downloaded win_python_build_tools, which should contain catkin. Yet, wstools could not find catkin either (which should be installed as package in python2.7.3). Also was n ot able to make cygwin. Included Python27 in the path (as indicated by python_build toos, but still even winros_initworspace doesn't work.
27 January 2014
- Trying to get localization working. Downloaded atwork_scenario map. Loaded map in map server with command rosrun map_server map_server at_work_refined/at_work.yaml. Visualized it with rosrun rviz rviz. Tried to localize with rosrun amcl amcl scan:=scan, but amcl complains that it doesn't receive scans (maybe I should start a youbot with laserscanner in Gazebo). In addition, rviz complains about "No transform base_footprint to map".
- Inspected /usr/local/share/youbot_gazebo_robot/launch/youbot.launch. This file uses the world "robocup_at_work_2012" . The standard youbot is equiped with a hokuyo, which publishes its scans as scan_front. With amcl running on those scans, the transforms are OK.
- Starting to make a world for rockincamp2014_atwork. I have measured the dimensions of the current configuration. The configuration is build of elements 30cm height and 4cm thick. There are three different elements: length 120cm, 80cm and 54cm. The platforms are 80cmx50cm and 19cm height.
- The urdf file refers to objects from their center (so if you connect elements to the backwall of 3m height everything is tilted. At the end the material of the elements are specified, which are described in /usr/share/gazebo-1.9/media/materials/scripts/gazebo.material. The youbot material is not found, I have descriptions in /home/arnoud/ROS/packages/youbot-ros-pkg/youbot_common/youbot_description/Media/materials/scripts/youbot.material. I would like to add a ground-plane with the provided map to check the dimensions.
- The current model is quite good, except the backwall (wall_1) and platform at the front-right (wall_2).
- Made flopped with scale 1.25 and 0.75. Result is quite good. X should be increased to 1.5, Y reduced to 0.66
- With scale 1.5 0.66 the Y is good (only the offset should be corrected). Scale X should be increased to 1.75. Increased the offset from 0.0 to +0.4.
- Scale X should be increased with 10% (to 1.9), offset is in wrong direction (will try -0.4).
- Result nearly good. Scale X should be decreased a bit (say 1.85), Scale Y should be increased a bit (say 0.69).
- Y is now perfect, X still a bit to big (lets try 1.8). Should also add some offset (increased from 0 to 0.2). Again wrong sign, lets try -0.2.
- Scale and offset is now OK, should only move objects. Wall_4 should go to the right (X from 0 to +0.1). Wall_5 should go the right (from 1.86 to 2.26). Wall
_7 should go the right (from -2 to -1). Wall_9 to the right (from 0.25 to 0.5).
Wall_12 seems node wide enough (increased from 0.8 to 1.2).
- Wall_4 should go a bit further from the wall (and wall_8 and wall_11 a bit further from Wall_4 (from 0.46 to 0.56). Also Wall_7 a bit further from the wall (from 0 to 0.25), Wall_5 still a bit to the right (2.26 to 2.5), Wall_12 is bit to wide (try 1.0 and move a bit to the right (1.2 to 1.3). Wall_10 a bit from the wall (from 0.23 to 0.33).
- Wall_7 moved to the wrong site (try -0.25), wall_5 moved slightly too much (try 2.46), wall_9 should go the right (y from 0.5 to 0.75), wall_12 should go to 1.3 (changed joint origin from 0.77 to 0.87).
- Positions are ok now, had to work hard to get the podium with the map at the right height (so that the youbot is not flowing through it). The surface is slightly tilted (even after specifying the rotation 6 digits after the float). Found a height where the tilting below the ground-plane is outside the arena.
26 January 2014
- The UvA@Work team has been teamed up with the ISEP@Work team, consisting of Rul Alen, Pedro Rodrigues, Manuel Silva.
- Instead applications, I download the rockin_camp package. First compiled mcr_teleop, which mainly installes resources in /usr/local/share/mcr_teleop/.
- For mic_teleop I needed to install ros-hydro-joy.
- Still, youbot_driver_ros_interface has problems with compiling and linking. Compiling can be solved by adding links to /opt/ros/groovy/include/youbot_driver, but after that the linking fails on missing libraries.
- Could download youbot_applications from youbot github (instead of mas-group). Still, cmake fails on missing /core/rosbuild/rosbuild.cmake.
- Also downloaded the youbot_driver from youbot github. The default branch is master, switched to hydro-devel. With this package installed, I could build the ros_driver.
- youbot_applications failed, but that was because no ROS_ROOT was installed. Installing hydro-ros-desktop-full added 128 new packages, including ros-hydro-ros. Now youbot_applications works (no make install defined).
- youbot_navigation failed because it contains three subdirectories. The installation in each of those subdirectories works.
- The difference between /opt/local/setup.sh and ~/ROS/hydro_setup.sh is the CATKIN_SETUP_DIR (/usr/local vs /opt/ROS/hydro).
- Added the youbot packages to the ROS_PACKAGE_PATH. Yet, youbot_applications is not in /usr/local/share.
- youbot_applications has to build in each of the subdirectories. Had to add link to /usr/local/include/youbot_driver/youbot, generic and generic-joints to build /usr/local/bin/youBot_ArmConfigurator.
- The youbot_applications directories could only be made when those directories where in the ROS_PACKAGE_PATH.
- Try to do roslaunch . Fails, which seems to be on mixing dependencies between groovy and hydro. Yet, strange enough, I have no groovy in my environement. Tried to start gazebo_ros directly with roslaunch gazebo_ros empty_world.launch, but got the error:
gzserver: symbol lookup error: /opt/ros/hydro/lib/libgazebo_ros_api_plugin.so: undefined symbol:
- Couldn find dependency on groovy. Start reading Gazebo ROS Integration page.
- Problem was that I used Gazebo 2.0, instead of Gazebo 1.9. Removing gazebo_current and gazebo solved the issue.
- I now have gazebo working, including gzclient. I was able to control the robot with mcr_teleop (by going to /usr/local/lib/mcr_teleop, the launch file didn't work).
24 January 2014
- Used for the first time pascal.ic.uva.nl as ssh-server. Received an empty home-folder and a limited number of commands.
- Continued with topic 2 of the RoCKIn Camp. Downloaded the datamatrix_finder and unpacked it in ~/catkin_ws/src.
- Installed libdmtx-dev.
- Run catkin_make in the ~/catkin_ws/ directory. As a result, also the package in youbot_ros_tools were checked. rospack profile seems to be called without underscore. The update manager updated 247 packages, but failed on three ros-hydro dependencies. Calling sudo apt-get install -f solved this issue.
- No openni_launch, so I installed sudo apt-get install ros-hydro-rgbd-launch. The openni_launch command is now available, but the openni.lauch file not, so also had to install sudo apt-get install ros-hydro-openni-launch. The launch file could now be found in /opt/ros/hydro/share/openni_launch/launch. Need a Kinect to proceed with the next step (roslaunch openni_launch openni.launch) of the topic.
- Checking all the packages needed for topic 6. The first missing package was ros-hydro-ros-control. The next is ros-hydro-vision-opencv. Last, not least, was installing the youbot_driver and youbot_driver_interface. Each repository had to be cloned seperately. Had to modify the soem/cmake_install.cmake script to install the headers (change src to include).
- For the youbot_driver_ros_interface cmake failed on missing pr2_msgs and brics_actuator. Make failed on missing YouBotBase.hpp.
- Should try to clone youbot_description first. This only installs files in /usr/local/share/youbot_description. youbot_diagnostics contains several directories (only made youbot_diagnostics). For youbot_applications I need a password.
10 January 2014
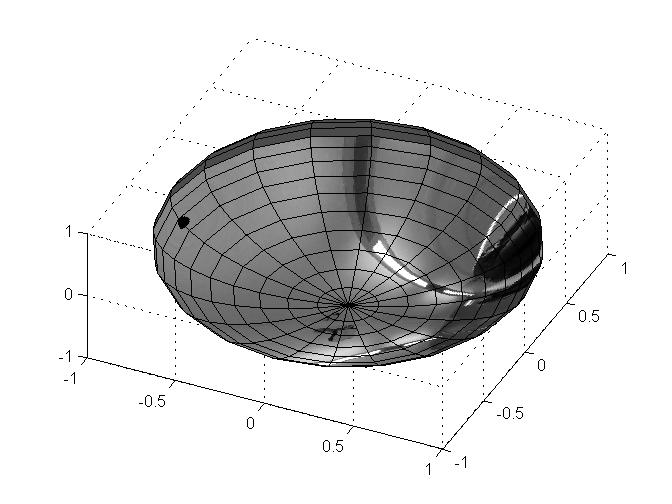
- Read chapter 10 and 11 of Robotics, Vision and Control. Installed the Toolbox in C:/Users/arnoud/Documents/MATLAB/Toolbox/rvctools. Looked at the code to create a warp image like Fig. 11.24. Strange enough, sphere_paint was not part of the distribution. Downloaded it from Google code.
 .
.
Viewed from below (view([65 -60])) it can be clearly seen that the lighting on the ceiling is not straight. Not strange; I need the values for l and m of the Theta camera, so I should calibrate first.
9 January 2014
- Looked at the calibration tools. Followed instructions from Robot Tracking Project. Install gstreamer-tools, now I can use /usr/bin/gst-launch.
- When I plugin the ceiling-camera in nb-udk, I receive ip-adress 169.254.187.181. When I connect the ceiling-camera to the DNT robolab router, I don't see it as one of the attached devices, and I cannot ping 192.168.1.222. The live-feed command on nb-ros returns with the error message (no route to host).
- Installed the Asus Xtion Pro Live on nb-udk from DVD. First NiViewer couldn find a dll, after restarting it couldn't find the device. One driver is still not installed, so I downloaded from OpenNI package version 20.4.4.0. After a restart the NiViewer64bits works.
- Checked if the Xtion ProLive was visible in Matlab. With test_camera (AMR-assignment3) I see two winvideo devices, the second is called 'VDP Source' and supports only H263_0x0, which is not supported by the Internal Webcam.
- When I directly connect the fish-eye internet camera to nb-udk, and assign a static ip-adress to nb-udk. Now I can ping. The stream can also be viewed with the VLC media player. I should use rtsp:192.168.1.222:8554/CH001.sdp.
- On the svn-server, I have version8 of InternetExplorer, so I could change the network settings of the camera back to 192.168.1.222. Now I could see the stream with gst-launch on nb-ros, although the wireless connection seems to be a bit slow (missing and deformed frames).
- Looked at the webinterface of the internet-camera. After installing a plugin I could watch the stream quite well (high speed). Can also change the format from H263 to MPEG, if needed. The GeoVision IPCam also has a VSS port (10000).
- Looked at the installUvA.sh from accompany.git. Unfortunately, this script is based on an old version of ROS, so rosdep for instance does not work anymore. Installed ros-hydro-navigation (all gstreamer0.10-plugins were already installed). Bas had said that they had a modified version of gscam, but the script just installs the standard version. Looked at documentation, but didn't saw any commandline options. Maybe in the image_pipeline wiki page. Installed ros-hydro-image-pipeline, which should give me at least the light-weight image_view.
7 January 2014
6 January 2014
- Prepared Topic 1 of the 2014 RoCKIn Camp. Was able to create a map from the homework.bag:
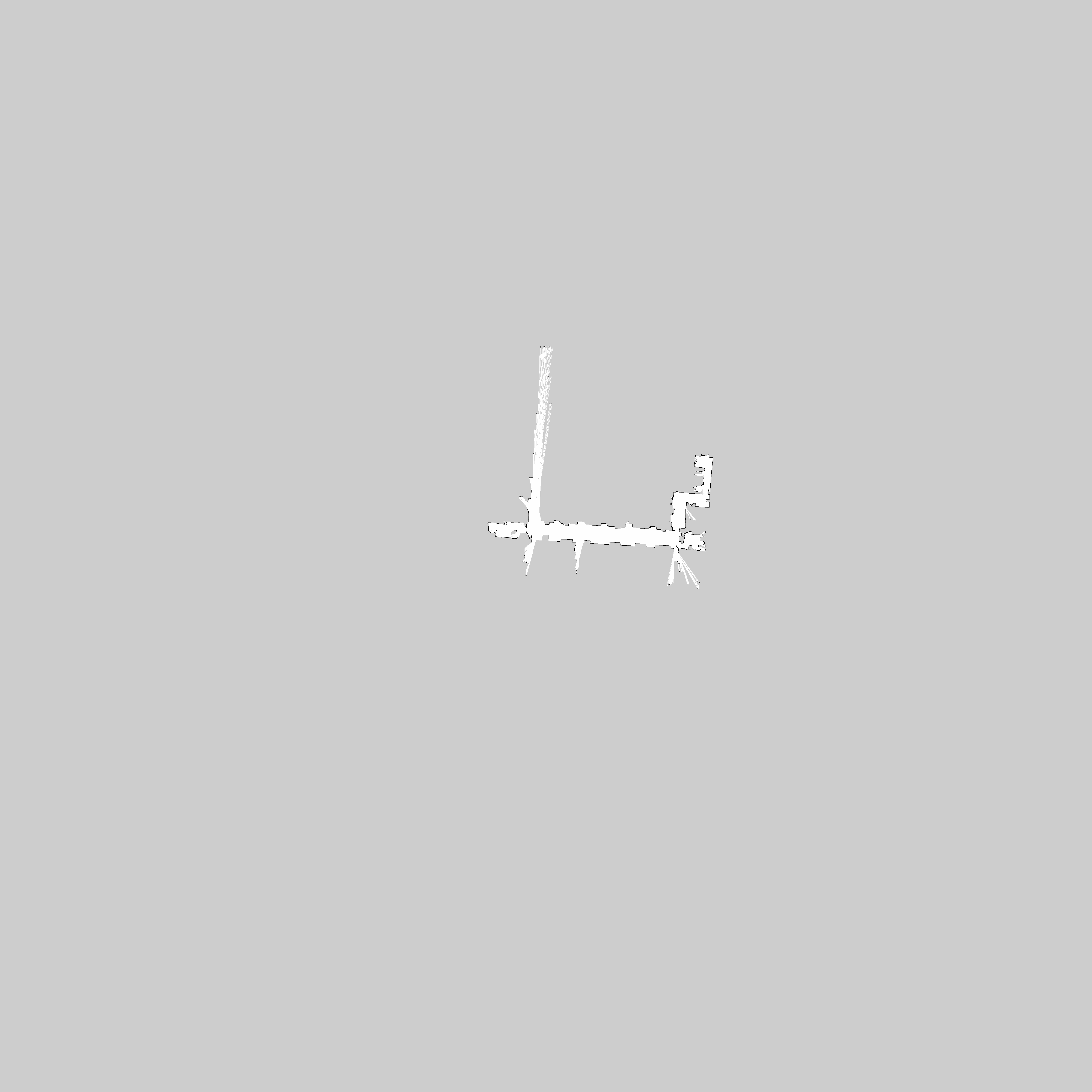 .
.
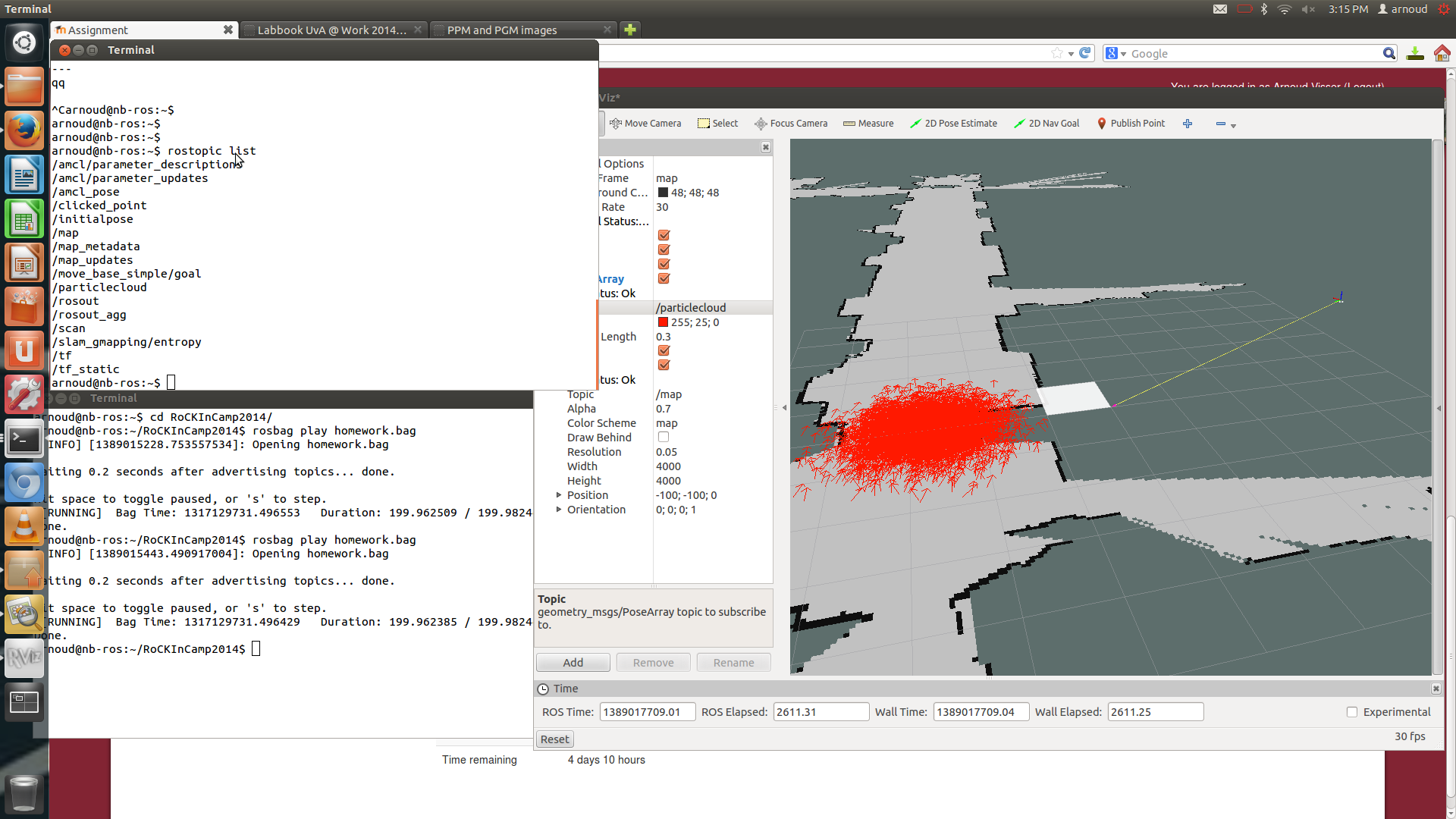
- The second part of the topic, localizing with acml, doesn't
seem to work. Could be that I am not fluent with rviz, or that amcl
ignores all odom because the timestamp is too old.
- The Map and PoseArray where already present in the
Displays-window of RViz, I only had to assign the right topic to this
class (one of the properties of each topic). Than I get the cloud with
the most probable location:
Previous Labbooks