Downloaded Choreographe 1.12. Could connect to usarnaoqi (although Choreographe was complaining that the Nao was using a different NaoQi version, which could result in strange behavior). Tried to perform a standup behavior from file, but failed. FPS is actually quite bad on nb-udk (15 FPS, 31% processor). Killed some programs, but still FPS too low (19%). Without Nao, FPS is 23 (UDK indicates DX9, although DX11 was requested. Without Choreograhe FPS is 25.
Problem was located in UDK which selected the onboard graphics instead of the GPU. Seems to only occur with 64bits version. 32bits was fast enough (although still Nao didn't stand up).
Tried to install UsarSim by only adding .git directory. Git detects 1 changed file and 152 insertions, but hangs on first file (Development/Src/UsarSensor/classes/ObjectSensor.uc). Copying all files from usarsim solves the issue. UsarSim seems to work without problems in December release. The 64bits version of the December release doesn't start (was also truth without any file of usarsim).
Compilation with new NaoQi 1.12 only had problem with snprintf -> _snprintf_s. Linking fails to find alippc.lib, libboost_serialization-vc90-mt-1_38.lib, libboost_system-vc90-mt-1_38.lib, libboost_date_time-vc90-mt-1_38.lib, pthread.lib, libboost_filesystem-vc90-mt-1_38.lib, libboost_signals-vc90-mt-1_38.lib, libboost_thread-vc90-mt-1_38.lib, libboost_program_options-vc90-mt-1_38.lib, shmpool.lib, alfindippc.lib, alfactory.lib. The libboost libraries could be easily replaced for their equivalent mt-1_44 versions.
Most complains are from pthread. There are 3 libs, tried pthreadVC2.lib (132 left). Added lib adn alerror.lib. (32 left). Adding qi.lib and naoclient.lib solved it (except NaoQi->version(), but this call could be commented out).
Adding a preference directory helped to start usarnaoqi.exe. Choreographe connected without complains, usarnaoqi warned that it could find PYTHONHOME (which is defined) and showed that 'isBehaviorPresent is deprecated'. Still, the legs seem to be crossed, and the Nao doesn't stand up.
December 20, 2011
This article should be added to the Dutch Nao site.
Could not easily make version 2.6.7 from source under Windows (only configure.sh script, but I don't want to make it under Cygwin). Downloaded 64bits version of 2.6.6 version (look if that works).
Added PYTHONPATH and PYTHONHOME (as suggested by University of Leon, replacing : for ; and $ for %).
Tested installation by typing python on Visual Studio 2008 prompt, followed by import naoqi. Get warning Dll load failed: no valid Win32-application.
Downloaded 32bits version of Python 2.6.6. Now import naoqi works.
Couldn't find usarnaoqi.bat, but just starting Release\usarnaoqi.exe also works. See a Nao on the soccerfield. Was able to connect with Choregraphe and to StandUp. usarnaoqi.bat is distributed in Sander's binary package.
Trying to start soul_sim.py. Downloaded dnt-rules, and added dnt-rules\naoqilib to PYTHONPATH. The module soul is now loaded, but gameStateController loads the module socket from naoqi-sdk, but fails to load module _socket.
Added C:\Programs\Python26\DLLs; to PYTHONPATH, which solves the socket problem. All python imports work now, program fails on gameController.init, because the host 255.255.255.255 is not valid.
Downloaded GameController2011. Starting a local GameController didn't help.
December 2, 2011
Booting with the 2Gb stick worked (although still a sound-waring was given).
December 1, 2011
Trying to perform NaoSupporter demo. Could standup and sitdown with behaviors from Choreographe 1.10.52.
Downloaded version 0.51 from ext2fsd. Allowed during setup the support for writing Ext2 and Ext3 partitions. Mounted the volume by starting up the service management (F7).
Used 8-Gb stick from my back. Several warning-sounds during startup. No wireless, but the Nao has a name (Pique). Version was 1.10.10. Flashed file with robocup-1.10.52. Choregraphe asked for a reboot to continue the flashing, but nothing happened. Doing it with the flasher of naoqi-sdk gave a protection error. Try again with pc-unreal. Nao doesn't have ext2fsd, but now there is no protection error to flash robocup-1.10.52 (with the 1.10.44 flasher). Switching the service of ext2fsd from startup to on_request (and restarting computer) solved the issue.
September 30, 2011
Updated UsarSim Image Server Manual. Tried to test with usarnaoqi, but the Visual Studio 2005 solution seems to be old. One source-file was renamed, include and library settings were pointing to older version 1.10.10. Also redirecting to 1.10.44 resulted in several linking errors. Added usarcamera.cpp. Seems to miss OpenCV libraries. Added C:\packages\OpenCV2.3\build\x86\vc9\lib, but switched also from VS2005 to VS2008 (as the solution should have done). Strange enough, Visual Studio started converting. Made a x64 configuration, added opencv_core230d.lib to linker-input. No 64bits naoqi libaries (and several pointer-size warnings), so switched back to 32bits. Only _cvCvtColor missing (not in opencv_legacy230d.lib, opencv_contrib230d.lib, opencv_features2d230d.lib, opencv_objdetect230d.lib, opencv_calib3d230d.lib) seems to be located in opencv_imgproc230d.lib. Usarnaoqi succesfully build, not tested yet.
September 30, 2011
Submitted error-report (#1955) for Wind to Aldebaran.
September 28, 2011
The new cartridges for the HP LaserJet 5550 have arrived. U153 couldn't connect directly anymore to the network (socket is dead). U154 has connection (it is the svn-server), it could ping to 146.50.40.200 and p002545.science.uva.nl, but no http response.
Connected via usb, and downloaded pcl6 drivers and HP Universal Print Driver.Actually, the package is a whole adminstator deployment package. Try it next time.
September 22, 2011
A direct flight to Mexico currently cost 924 euro (KLM), indirect 761 euro (Lufthansa).
Yalda Walinezjad said in an interview that the Iran Instituut also gives lectures about Iran. Maybe a nice idea to invite her for March 2012.
September 8, 2011
Upgraded abeel with the commands sudo apt-get update and sudo apt-get upgrade, as described in the Ubuntu guide.
September 5, 2011
Tried to install v1.10.3 on nb-unreal. On the CD was v1.10.10.
24 August, 2011
Looked at the original reference for kd-trees. Found An intoductory tutorial on kd-trees from 1991, which refers to Bentley 1980 and Friedman et al. 1977. Bentley calls his algorithm ECDF2 and ECDFk (Empirical Cumulative Distribution Functions ). Friedman uses the term k-d tree, and revers to Bentley 1975. That one claims the term in the abstract, so seems to be the original reference.
16 August, 2011
Bas is back, so I have an account on the nomad-laptop. In addition, Bas' visualisation software could read both Hokuyo's without problems. Yet, the readings from the Nao were still limited to 0.7m. According to Bas's experience this could be power issue (the laser goes less far when not enough power is provided). Repeated the experiment with the Nao's Hokuyo powered by the Nomad's battery. Now the Nao's can scan the full range.
August 10, 2011
Problem with short range of Pique's Hokuyo, see roboresc labbook.
8 August, 2011
Added a section about simulation to DNT's TechReport. Tried to load python naoqi\lib\soul.py. Code fails on TextToSpeech (which usarnaoqi handles more gracious). Commenting out the speak and audio gives an error in longDistanceTracker.py (couldn't import cv). That is strange, because OpenCV is installed. Relevant environment variables are AL_DIR=C:\Programs\Aldebaran\naoqi-sdk-1.10.44-windows-vs2008, PYTHONPATH=%AL_DIR%\lib and PYTHON_LIBRARY_PATH=C:\packages\OpenCV2.1\Python2.6\Lib-site-packages. Moved the opencv sitepackage into PYTHONPATH, but that didn't help. Time for an installation / usage guide.
3 August, 2011
With COG a little further to the front the Nao stands up nicely. Walking doesn't work for me, but this is due to the cameras. The release version of usarnaoqi doesn't work, while the debug version works fine. Same script, same environment variables, no obvious differences in the project file and Sander always uses the release version. Strange.
20 July, 2011
Tried today to start NaoSim on nb-unreal. Started simNaoQi.exe from the commandline. Tried with AL_DIR set to 1.10.25 and 1.10.44 (both failed). PYTHONPATH shouldn't be set. Should try 1.10.3 when I get the disk.
29 June, 2011
Tried the usarnaogi.exe I made, but programs fails with 'unable to start correctly (0x015002). Retry after setting AL_DIR to v1.8.16.
Now the program works, but fails on ALNaoQiClient::setALPath(), although the string is correct. Maybe the use of v1.10.10 includes is not a good idea :-). Anyway, the naoqiclient.h is the same for both versions.
Skipped SetAlPath, next crash is again in msvcp80.dll.
27 June, 2011
Clean install of usarnaoqi. Still same problems (Initiation of ALMemory and ALProxy, and getStiffnesses function). v1.8.16 is the last vc80 library, but fails on my Windows7 includes. Time to upgrade to vc90.
26 June, 2011
Combined v1.10.10 includes (to prevent warnings about Windows7) with v1.8.16 libraries (last vc80 libraries). Only 7 errors, mostly about ALMotionProxy::GetStiffness.
Adding v1.10.10 before the v1.8.16 libraries gives 126 errors about Container_Base_secure. Both 2008 and 2010 redistributable are installed.
Added naoqi\motion.lib, which solves 3 errors. 4 errors left. Adding the other libraries in naoqi doesn't help.
Maybe another al*.lib is missing. Deleted the references to the two proxies. Now it compiles (yet the stiffness is not set, and some ranges are not set.
Problems with MSCVRT.dll. In the Linker->Input there are many vc90 libraries defined (while I need vc80 libraries). V1.6.13 had some libraries, but not all. Found more on the internet and in V1.3.13. Downloaded v1.8.16, which had the largest collection. Yet, now the includes fail on the Windows7/include/ws2def.h. Should try v1.10.10 includes with libboot libraries from v1.8.16 (also downloaded code from libboot from sourceforge).
Read last unread Chapter of Geometrical Algebra for Computer Science. In chapter 16 inversion and transversion is introduced. Those transformations are clearly still searching for some applications. Anyway, quite an impressive book with many opportunities.
23 May, 2011
Moved all GTK runtime code to own directory in programs.
Downloaded GTK+-bundle from Gnome ftp-site.
According to my log of previous year I had equivalent problems (and installed the GTK runtime code in packages).
Yet, I seem to need pygtk. According to the ReadMe I need a 32bits Python interpreter. Downloaded version 2.7.1. Downloaded pygtk-all-in-one. This solves the glib issue.
Next issue: the numpy.linalg. Downloaded the superpack-1.6.0 from sourceforge. Although
"C:\Users\robolab\AppData\Local\Temp\numpy-1.6.0-sse3.exe"
reported problems, python Controller.py is now executed without problems (although nothing happens).
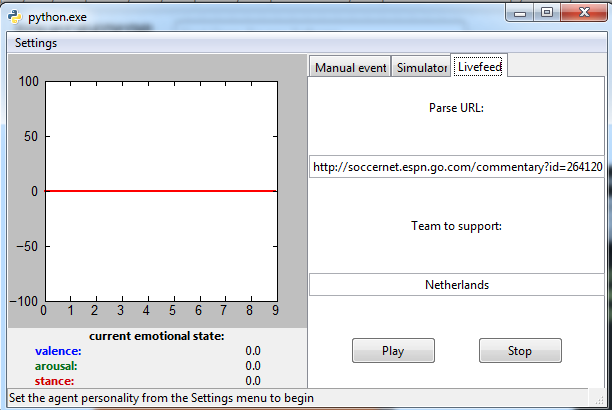
python Core.py --127.0.0.1 fails on importing matplotlib. Downloaded matplotlib for python27 from sourceforge. Finally, I can start playing:
Setting the personality and starting the program gives the complaint that naoqi could be imported. Added C:\Programs\Aldebaran\naoqi-sdk-1.10.10-windows-vs2008\naoqi-sdk-1.10.10-windows-vs2008\lib to PYTHONPATH. Now I receive the complaint that naoqi is using python2.6.
Downloaded Python 2.6.6 32bits. Downloaded pygtk all-in-one for python2.6. Downloaded numphy for python2.6. Downloaded matplotlib for python2.6. Again one step further, the program now fails on ALBrokerProxy:getProkerInfo. Time to use a real Nao. Rouge is using 1.10.10, according to my Dutch Nao Day log.
With Rouge, the program now fails 'Couldn't open file /home/nao/behaviors/standup/behavior.xar'. Uploaded behaviors. ALTextToSpeech gives an SOAP error. Also with Sad the ALFrameManager gives a SOAP error.
Found a stick with 1.8.11. Here the TextToSpeach works fine. Only the corners give problems.
Gave all emotional behaviors a name, so that they could be called from Choregraph.
Also tried to run NaoSciccors. Fails to import cv. Added PYTHON_LIBRARY_PATH, without success. Copied the files in C:\packages\OpenCV2.1\python26\lib\site-packages to C:\Programs\Python266\lib\site-packages, which works after adding C :\packages\OpenCV2.1\bin to PATH.
NaoSciccors now fails to import PIL. Downloaded PIL 1.1.7 for Python 2.6. Now module called mlpy is missing. Couldn't find this module, but still had a download from https://mlpy.fbk.eu.
Now it works. The demo should start in standing position. Distance to nb-unreal camera should be 1 meter. Head should be visible.
22 May, 2011
At November9 I had the emotional behaviors of NaoSupporter working with an 1.6.13 stick.
The behaviors from demonstrate_paper, rock, scissors work fine. Disgusted is still called behavior, and doesn't show much (no coloured LEDs in Choregraphe or NAOsim).
Tried to load Controller.py. Fails on glib. There exists a Glib python binding, but I think that gtk+-bundle was used. Current version of Python is 2.5.2 (although not explicit in the path).
Added Python264 to the path, python26.dll is missing. Added NaoSim to the path. Now python works.
The current production versions are 2.7.1 and 3.2. Downloaded latest version 3.2. Didn't add python32 yet to the path.
Loading the controller stills fails, now in gtk-2.0 (loading dll). Installed 64bits version of GLib from www.gtk.org. Extracted packages in C:\Programs\Python264. Added path C:\Programs\Python264\bin (which was created by run-time package) to the path. Python complains that this is not a valid Win32 application. I have many glib-1.3 available. Added instead C:\Programs\FWTools2.3.1\bin to the path, but now I get the warning: The specifield module could not be found. Lets try the 32bits version, from www.gtk.org. Still, d module could not be found.
Also installed gtk+-version. The 64bits version has dll which are called win32?! Combined it with the files from glib/bin64 into Python264/bin. Still warning that this is not a valid Win32 application. Should remove sitepackage\gtk-2.0 or install sources fro gtk+.
Downloaded 64bits sources. Made C:\src\bzip2-1.0.6. Decompressed tar file. Tar file is c-code. Need to find gtk site package.
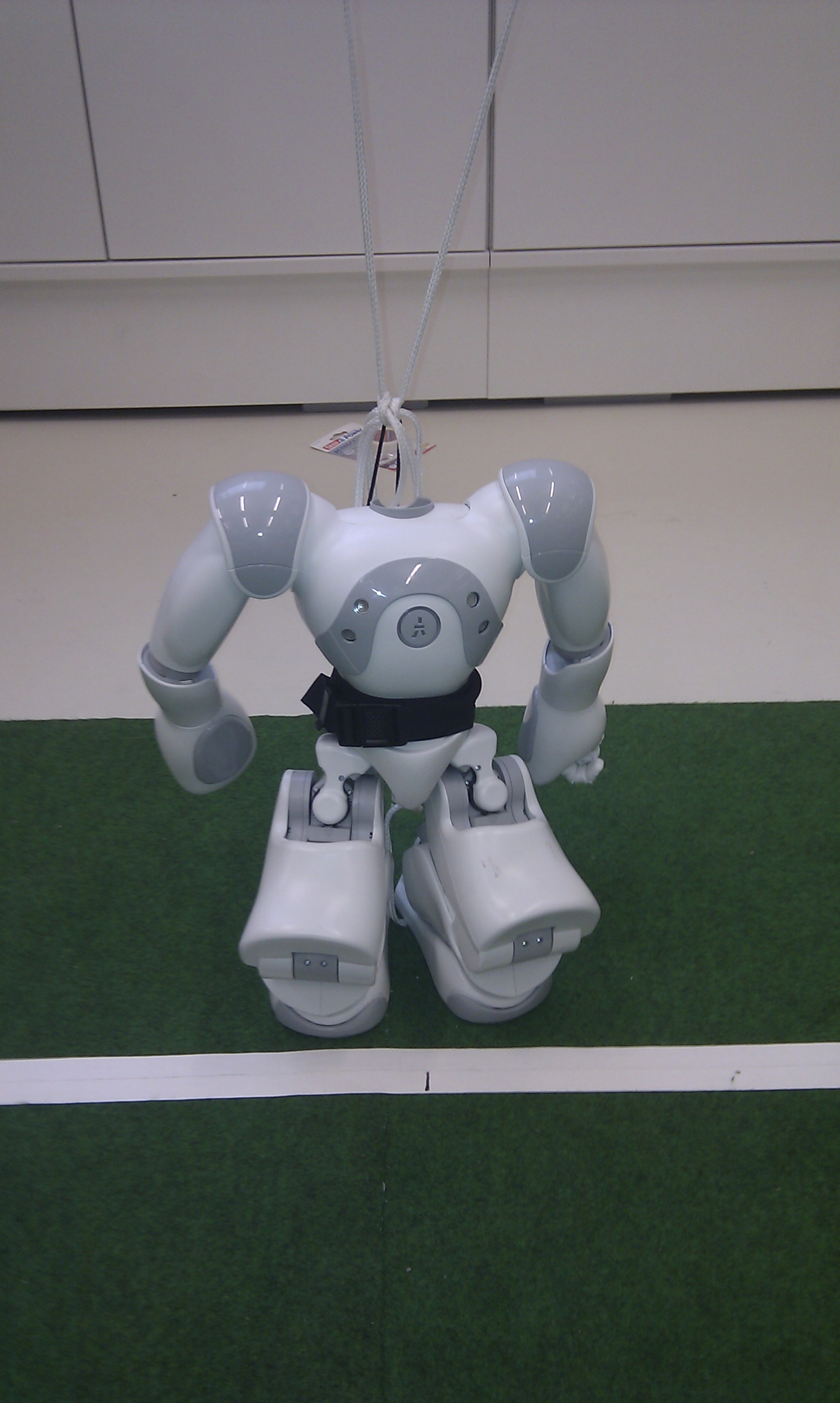
Made a support for the Nao, to prevent that Duncan looses it's head again:
13 May, 2011
Read other half of Chapter 14 of Geometrical Algebra for Computer Science. Should have been the most interesting part of the book (with e.g. inverse kinematics application), yet I wasn't impressed by the beauty of the solution.
12 May, 2011
Read half of Chapter 14 of Geometrical Algebra for Computer Science. The Conformal space is extended with other geometric elements. One of them is a tangent: two points at zero distance but with a direction. Is this a good geometric element for a point of a laser scan?
Tested if Overmind neck was OK. When only the eye-lights flicker, but no progress is shown at the ears, it could be that the memory-stick is missing. Tested the robot with a BugsBunny-stick from Choregraphe (moved both joints full range, executed whipe forehead motion) on nb-unreal.
Installed Choregraphe 1.10.37 on u013152 (after cleaning up).
11 May, 2011
Read 13 of Geometrical Algebra for Computer Science. Finally the full operational model for Euclidean Space is introduced, the Conformal space. This space as one explicit point at the horizon, in contrast with the inproper points of the Homogeneous space. This explicit point allows to gradually change spheres into planes.
25 April, 2011
Read 12 of Geometrical Algebra for Computer Science. First part is about Plükler coordinates, which is an efficient way to describe point, lines and planes (each with another bracket). In the book was shown that each description used another reference frame. Second part was about stereo-vision, which seems directly applicable.
Read chapter 9 and 10 of Geometrical Algebra for Computer Science. Chapter 10 ends with an example how to calibrate multiple cameras tracking a single point (sounds like Carsten's AR.Drone).
Found an update about Ros for Nao. Latest version supports NaoQi 1.10.
24 March, 2011
Send Henk, Duncan and Rouge to Aldebaran.
18 March, 2011
Tried to connect Rouge to leaderlab, but I failed. BugsBunny arrived from Rome, and used BugsBunny instead.
Installed Bonjour and Choreograph 1.10 on nb-unreal.
Blue (not going, but to be complete): ALDR0902C0100408
7 February, 2011
Also Rouge's ethernet connector is repaired. Equiped the head with a rc-1.10.10 stick. Setup the wireless robolab network. First restart resulted in a failure according to the webinterface. Second time same problem. Weblog showed:
Feb 7 10:10:44 nao daemon.info connmand[1633]: wlan0 SCANNING (scanning)
Feb 7 10:10:44 nao daemon.info connmand[1633]: wlan0 scanning started
Feb 7 10:10:46 nao daemon.info connmand[1633]: wlan0 scanning finished
Feb 7 10:10:46 nao daemon.info connmand[1633]: wlan0 DISCONNECTED (scanning)
After a manual connect, the log showed:
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 {newlink} index 4 address 00:02:72:6F:C5:0C mtu 1500
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 {newlink} index 4 operstate 6
Feb 7 10:15:00 nao daemon.info avahi-daemon[1661]: Joining mDNS multicast group on interface wlan0.IPv4 with address 192.168.0.88.
Feb 7 10:15:00 nao daemon.info avahi-daemon[1661]: New relevant interface wlan0.IPv4 for mDNS.
Feb 7 10:15:00 nao daemon.info avahi-daemon[1661]: Registering new address record for 192.168.0.88 on wlan0.IPv4.
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 {add} address 192.168.0.88/24 label wlan0
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 ip bound
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 {add} route 192.168.0.0 gw 0.0.0.0 scope 253
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 {add} route 192.168.0.250 gw 0.0.0.0 scope 253
Feb 7 10:15:00 nao daemon.info connmand[1633]: wlan0 {add} route 145.18.39.16 gw 192.168.0.250 scope 0
Time for a cross-compilation of the connman-shell interface.
4 February, 2011
Installed NaoSim at nb-unreal. Start a simulation fails on simNaoQi.exe. Starting this program from the command line indicated that the AL_PATH was still on sdk-1.6.13. So, libfactory.dll was not found.
Set AL_PATH to sdk-1.10.10. Script now proceeds, but complaints that ALTools cannot find a free socket. Running a local NaoQi from Choregraphe doesn't help (crash directly after run local naoqi).
Looked at the Unity resources of NaoSim. The UnityEditor can import meshes, textures, anims and bones from Blender, via Blender's FBX exporter. Downloading the Unity v3.1.0f4 Editor to see what it can export. Unity can also make nice worlds for the Android:-)
Started with a StandardAssets-project. Couldn't load 'unity default resources'. Seems to be a tempory file in \My Documents\New Unity Project\Library. Yet placing it there doesn't mean that the resources are loaded. Did in Unity a build. Now a new data directory is made, including 'unity default resources'. Overwritten the file with NaoSim's file. When executing the UnityBuild, I got the error: The resource Internal-GUITexture.shader could not be loaded from the resource file! Inside the editor I get Failed to get value caps.
1 February, 2011
The new Nao's have arrived. With their white rc.1.10.10 sticks, the wireless-settings are permanent.
Solved the issue about combined access to the Nao's and internet. The wireless accesspoint is connected to the linux-server. The wired router is one of the wired clients of the wireless accesspoint. There is more than enough space for every computer to connect to the wired router.
The blue samurai is tested with the robolab access-point (chest button is not very responsive). The red samurai is still configured for the SMC access-point.
24 January, 2011
The Nao didn't want to boot with 8Gb stick. Flashed 1.3.8L (Nao Flasher needs the image (doesn't have to be unpacked) in the same directory). With this stick Pique boots. The connmand version for NaoQi 1.10.10 is 0.62. Unfortunatelly, version 0.63 seems to be a relevant update (wpa_supplicant will use nl80211 API instead of deprecated wext API). With naoweb debug information from connmand is printed. Unfortunatelly, the setting is still not permanent:
The 8Gb stick boots when flashed with the Nao Flasher tool. Still no /etc/default/connman on this version.
Copied the naoweb version 1.10.10 to D:\projects\Nao.
When I give a /etc/init.d/connman restart option, the server constantly associates and breaks the connection again:
Downloaded connman 0.62 source. Configure couldn't find resolve library under cygwin. Installed libdns-development package. Still no resolve library (also not on tunis). According to ubuntu connman depends on libglib2.0-dev and libdbus-1-dev. Installed libglib2.0 for cygwin (still no resolve). Installed libdbus-1-dev for cygwin (still no resolver library). Found manual how to debug connman. Also found that Connman has a command-line tool (cmcc help). Didn't find cmcc in \usr\bin.
Found in connman-0.62/doc/config-format.txt that preferences are stored in /var/lib/connman. Edited default.profile and made SMC only favorite (and AutoConnect=true).
Made a script to add SMC to the network. Or this is working, or rebooting works (but I have a double interface into the robot)! Unfortunatelly, script is not working and with a hard reboot settings are gone.
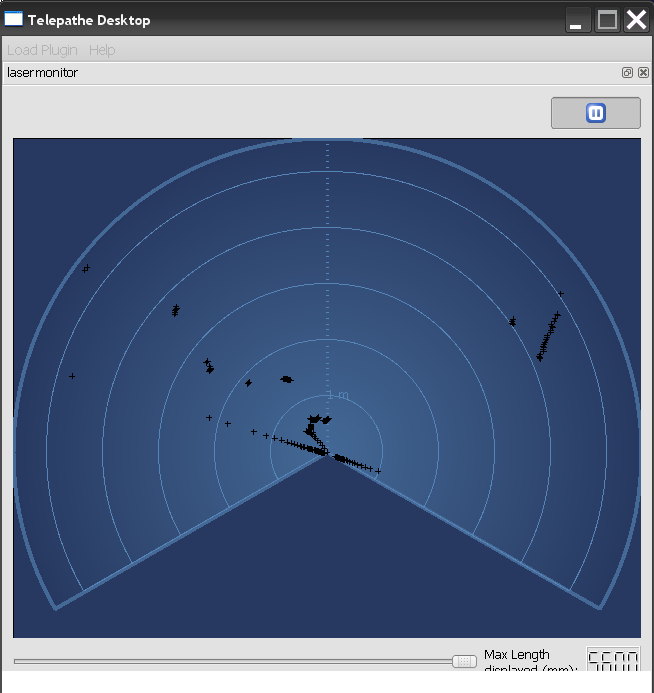
Telepathe has now a lasermonitor as view:
23 January, 2011
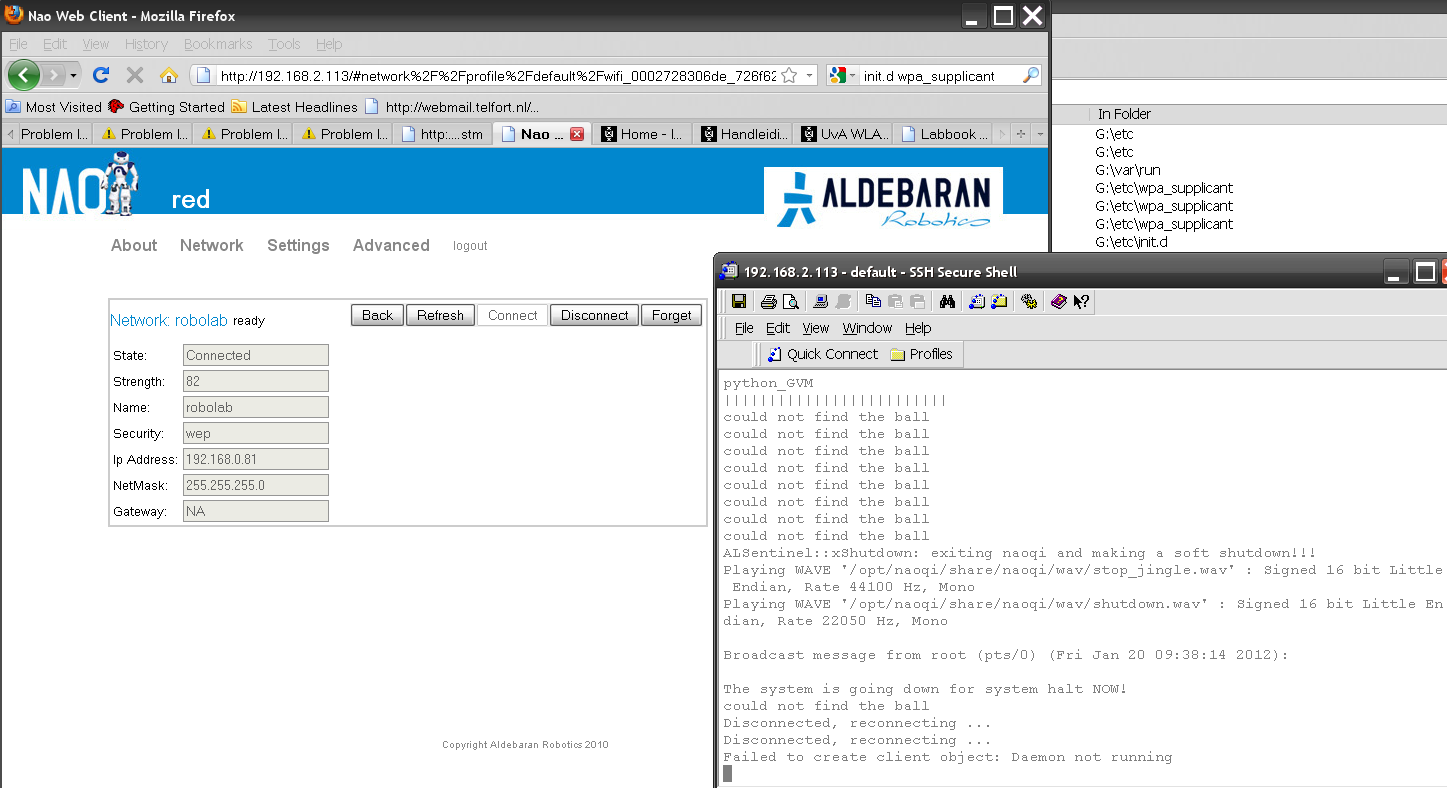
Downloaded v1.10.10 from Choregraphe. Unfortunatelly, it crashes after registering the key. Try a reboot.
Starting Choregraphe with the bat script works, so Choregraphe seems to have some problems with PATH, or PYTHONPATH.
Flashing from Choregraphe requires a robot, flashing with the tool in the SDK-tool didn't work because it checks the size. Have to do it the old way. Flashed with the tool dd-removable in NaoQiAcademicsvc80-1.3.13-win32. 499,957,760 bytes written.
19 January, 2011
Had the same problems with executing wpa_supplicant in 2009. Maybe problem with arguments?
In 2010 I restarted wlan with /sbin/ifconfig wlan0 down, followed by /usr/sbin/wpa_supplicant -Dwext -i wlan0 -c/etc/wpa_supplicant.conf. Unclear if the complains are errors or warnings.
The academics site doesn't give information (other than to manage it with the webinterface). B-Human works with scripts, but those are to prepare the stick.
I made the wpa_supplicant script in /etc/init.d, but I also should register this service with update-rc.d default.
The scripts from the webinterface can be found in /srv/www/naoweb.
Inside services/network.py, there is the function net_add(request, ssid, passphrase, security). This code calls the dbus.Interface from org.moblin.connman.
For Pique, the mac-adress of eth0 is 00:01:C0:05:BB:C1. The mac-adress of wlan0 is 00:02:72:83:06:DE. Changed the settings of /etc/network/interfaces, but the command iwconfig wlan0 up shutsdown the system (or is this due to heat).
The webinterfaces calls the script /etc/init.d/connman restart, which calls /usr/sbin/connmand applying the shell-commands in /etc/default/connman. No defaults exist. These are the options for connmand.
The Nao has connmand version 0.54. Restarting didn't help (also not without wlan0 in the /etc/network/interfaces file. Also a sequence like:
root@red [0] [/etc/network]# ifconfig wlan0 down
root@red [0] [/etc/network]# iwconfig wlan0 mode managed
root@red [0] [/etc/network]# iwconfig wlan0 essid "SMC"
root@red [0] [/etc/network]# ifconfig wlan0 up
root@red [0] [/etc/network]# iwconfig wlan0
wlan0 IEEE 802.11bg Mode:Managed Frequency:2.462 GHz
Access Point: Not-Associated Tx-Power=20 dBm
Retry min limit:7 RTS thr:off Fragment thr=2352 B
Encryption key:off
Power Management:off
Link Quality:0 Signal level:0 Noise level:0
Rx invalid nwid:0 Rx invalid crypt:0 Rx invalid frag:0
Tx excessive retries:0 Invalid misc:0 Missed beacon:0
Doesn't work
Without wlan0 in the interfaces-file, no available networks are found in the webinterface. Getting the old file back works;
iwconfig wlan0
wlan0 IEEE 802.11bg ESSID:"SMC"
Mode:Managed Frequency:2.462 GHz Access Point: 00:04:E2:AC:38:38
Bit Rate=1 Mb/s Tx-Power=20 dBm
Retry min limit:7 RTS thr:off Fragment thr=2352 B
Encryption key:off
Power Management:off
Link Quality=11/100 Signal level:36/100
Rx invalid nwid:0 Rx invalid crypt:0 Rx invalid frag:0
Tx excessive retries:0 Invalid misc:0 Missed beacon:0
but after a /etc/init.d/connman restart the connection is gone.
Tried to do wpa_supplicant, got the following errors:
root@red [255] [/etc/network]# /usr/sbin/wpa_supplicant -Dwext -i wlan0 -c /etc/wpa_supplicant/wpa_supplicant.conf_robolab
ioctl[SIOCGIWSCAN]: Resource temporarily unavailable
Trying to associate with 00:c0:02:eb:61:b2 (SSID='robolab' freq=2462 MHz)
Associated with 00:c0:02:eb:61:b2
CTRL-EVENT-CONNECTED - Connection to 00:c0:02:eb:61:b2 completed (auth) [id=0 id_str=]
Previous command was after an ifconfig wlan0 down. With an active wlan0 I got the normal:
root@red [0] [/etc/network]# /usr/sbin/wpa_supplicant -Dwext -i wlan0 -c /etc/wpa_supplicant/wpa_supplicant.conf_robolab
ioctl[SIOCGIWSCAN]: Resource temporarily unavailable
Trying to associate with 00:c0:02:eb:61:b2 (SSID='robolab' freq=2462 MHz)
Authentication with 00:c0:02:eb:61:b2 timed out.
Trying to associate with 00:c0:02:eb:61:b2 (SSID='robolab' freq=2462 MHz)
Associated with 00:c0:02:eb:61:b2
CTRL-EVENT-CONNECTED - Connection to 00:c0:02:eb:61:b2 completed (auth) [id=0 id_str=]
CTRL-EVENT-DISCONNECTED - Disconnect event - remove keys
Trying to associate with 00:c0:02:eb:61:b2 (SSID='robolab' freq=2462 MHz)
ioctl[SIOCSIWENCODEEXT]: No such file or directory
Associated with 00:c0:02:eb:61:b2
CTRL-EVENT-CONNECTED - Connection to 00:c0:02:eb:61:b2 completed (reauth) [id=0 id_str=]
CTRL-EVENT-DISCONNECTED - Disconnect event - remove keys
Try next time to make python script which starts the wlan automatically from the naoweb-network.py.
Other possibility is to get a /etc/default/connman and set DAEMON_OPTS="$DAEMON_OPTS -d" to watch what goes wrong.
18 January, 2011
Aldebaran suggested to send both heads for maintanance. Collected our third head Pique (which still haves a working ethernet connector). Couldn't boot, but this was due to a corrupted memory-stick (white classic Kingmax, labeled 1.3.17). With the 'Find the Ball'-stick Pique could boot, and with the white stick Rouge couldn't. Could connect wired to SMC, and could switch the wireless network on (set it to robolab). Unfortunatelly, same stick didn't connect to robolab when in Rouge.
17 January, 2011
Tried to make a wireless connection to my Nao's. Three sticks didn't have a /etc/wpa_supplicant.conf, luckely 1.3.8L had. This stick didn't boot. Gave wpa_supplicant.conf to other sticks, but still no connection. Changed the ssid to SMC, still no connection.
Tried to follow instructions to connect to UvAwireless. Downloaded the uva certificate and installed it in /etc/wpa_supplicant/WirelessIcUvaNl.crt. Made a wpa_supplicant.conf with this inner authentication, but still no connection.
Made a script for /etc/init.d/wpa_supplicant.sh to guarantee that the service is started after booting. Still no success.
12 January, 2011
The tutorial recommands a Trancend 8Gb stick. Compared the specs of the JetFlash T3 (30.2mm x 12.3mm x 2.4mm) against the Kingston Super Stick (classic 34.2 mm x 12.4mm x 2.2mm, mini 31.5mm x 12.4mm x 2.2mm). Transcend claims that the JetFlash is more rugged. I am more interested in the temperature range (0-70 deg for both Transcend and KingMax). The mini has an higher temperature tolerance.
Enige Nederlandse aanbieder tot nu toe die ik kon vinden is webwinkel.
11 January, 2011
Downloaded ctc-1.8.16 and installed in /home/arnoud/packages.
Configure seems to work, although the script ends with "cannot remove 'libtoolT'". Make and make install of apr-packages seems succesful. According to Apache Portable Runtime project the used version (1.4.2) is the latest release (April 2010).
Configure of apr-utils also works, but make fails with: /home/arnoud/packages/ctc-1.8.16-linux32/cross/geode/bin/../lib/gcc/i586-linux/4.3.3/../../../../i586-linux/bin/ld: crti.o: No such file: No such file or directory
Adding CTC_USR_DIR/lib to LD_LIBRARY_PATH and/or PATH didn't help. The tutorial suggested to copy the complete CTC_DIR to a /home/opennao/opennao-1-4-x/build/tmp/. Instead, I made a symbolic link in xml/expat to crti.o and crtn.o.
Still, the make fails. According to the config.log, apr and apr-utils are configured with /home/opennao/opennao-1.7.x/build/tmp. This dependency is coming from /home/arnoud/packages/ctc-1.8.16-linux32/cross/geode/bin/i586-linux-gcc -v. Creating this directory, and copying CTC into this directory solves this issue. According to Apache Portable Runtime project the used version (1.3.10) is the latest release (October 2010).
Finished step 4: Cross-Compiling of non-ROS modules, continuing with step 5: Cross-Compiling ROS.
./rosinstall -n ros cturtle_base.rosinstall fails:
ImportError: No module named yaml.
sudo python setup.py --without-libyaml install installs the package at /usr/local/lib/python2.6/dist-packages/yaml/, and not on the target disk. python setup.py --without-libyaml build makes /tmp/NaoStick/PyYAML-3.09/build/lib.linux-i686-2.6/yaml and the command python -m compileall byte-compiles this code.
Now ./rosinstall -n ros cturtle_base.rosinstall fails on:
/bin/sh: svn: not found
10 January, 2011
Arranged a Linux system (ArnoudsUbuntu) to experiment with.
Made a script BasicSettings.sh and AutoMakeSettings.sh for the Requirements step of the Nao Cross-Compilation manual.
Need to download and install Aldebaran's Crosscompilation Tool Chain (ctc) before I can continue with step 4
Continued with step 5 of the Ros-cygwin tutorial tutorial. The tutorial is based on the Box Turtle release (March 2010), while there is already a C Turtle release (August 2010). Brown's ros-pkg used for the CS148 assignments is based on C Turtle.
The package paramiko was hanging (although nothing had to be done) and had to be stopped with a single CTRL-C.
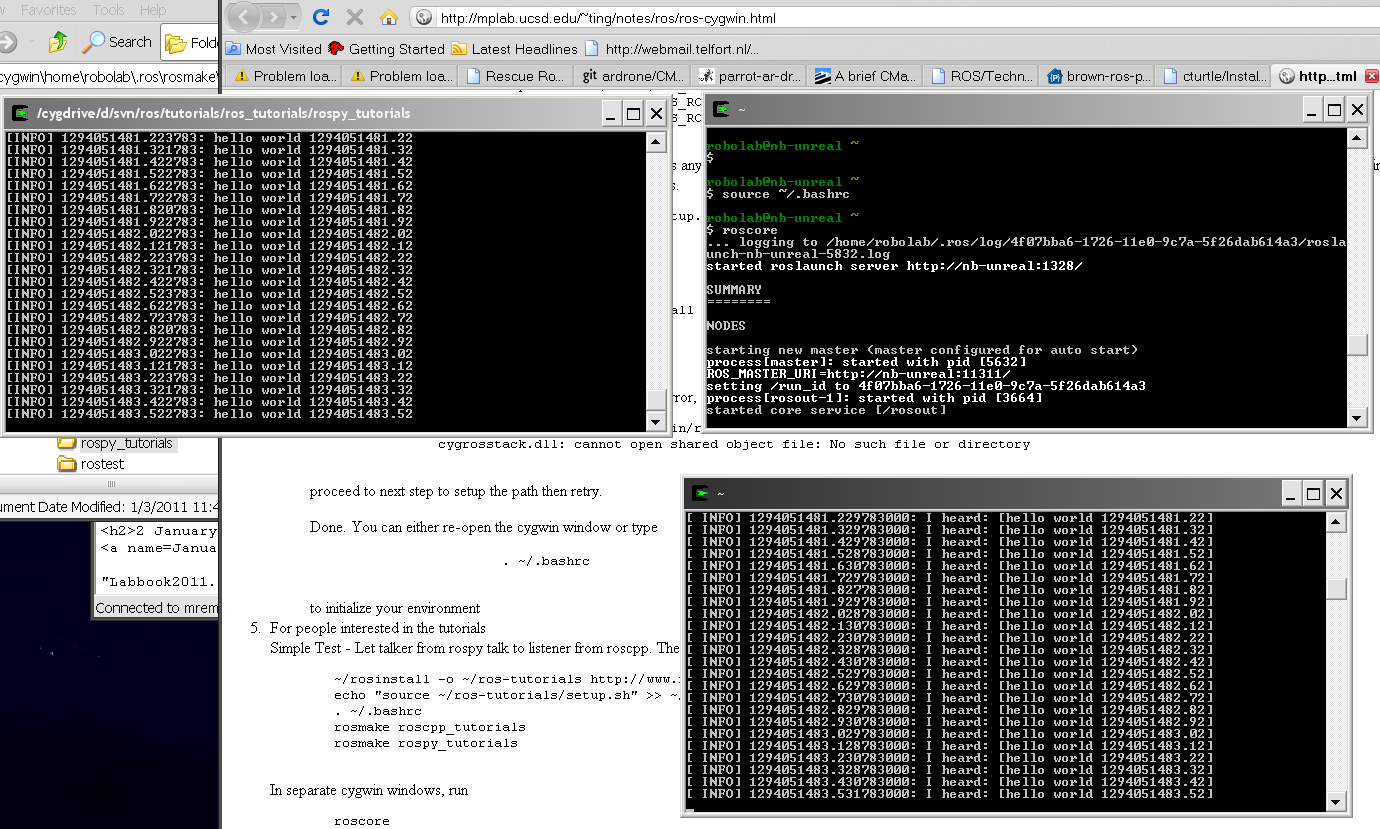
Finally (after 6 hours), I have my hello world example running.
2 January, 2011
Checked the middleware lecture from Brown's 'Builing Intelligent Robot' course.
Tried the ROS for Windows installation. This will allow to run a Windows ROS-node, the ROS-master still has to be on a Linux-machine.
According to Tingfan Wu, the ROS-master can be created under cygwin. Continued with Tingfan Wu's tutorial:
Added package wget and apt-cyg.
The command ~/rosinstall -n ~/ros http://ros.org/rosinstalls/boxturtle_ros.rosinstall gives the warning rosinstall from http://code.ros.org.rosinstall has been decomissioned. Please see http://www.ros.org/wiki/rosinstall for the new version.. Moved the installation to /cygdrive/d/svn and changed the ros/setup.sh correspondenly (to prevent /ros/ros as ROS_ROOT).
rosmake rostest fails directly on making rospack. Make can't find the targets, so I downloaded cmake via apt-cyg (only did apt-cyg for gcc4).
Still problems, now with gmake in Matlab's directory. Removed C:\Program Files\Matlab\R2009a\bin\win32 from path. That helped.
Next failure was 3rdparty\gtest. Copied site-packages/yaml from python2.6 to python2.5. Got libboost-devel with apt-cyg. Now the installation continues.
Problem is still in gtest. Problem was the spaces in PATH. Removed NEWPATH reference from Makefile, and now make gtest works and rosmake rostest continues with package genmsg_cpp (part of the ros core).
Program halted in another 3rdparty package (pycrypto). Checked build_output.log in ~\.ros\rosmake. Manually untarring worked without problems. rosmake rostest continued with next package (rospy). Also paramiko had ownership problems (solved manually, this time by a manual make (not a manual untar)). Further no problems to the last package (no 13) rostest.
Tomorrow step 5 of the tutorial, the tutorials with the master, talker and listener.