Labbook Dutch Nao Team
Error Reports
- Bleu hips are squicking.
- Nao's overheats faster when using arms than using legs.
- Bleu's left eye is not functioning.
Started Labbook2013.html.
1 November, 2012
- Chili Robotics Team has released a more recent Nao stack. Yet, also their first instruction was to use rosinstall. So, I found an minimal rosinstall for windows.
- Yet, the script they suggest is a bash-script. I found the file ~/ros-underlay/ros/core/rosbuild/rostoolchain.cmake in C:\opt\ros\fuerte\x86\share\ros\core\rosbuild. This file suggests to not edit this file, but to create a $(ROS_ROOT)/rostoolchain.cmake. In my case, the ROS_ROOT should be equivalent with C:\opt\ros\fuerte\x86, but is actually set by the env.bat to C:\opt\ros\fuerte\x86\share\ros. The stacks are also on a different location than suggested by the Chili's suggested bash-script (C:\opt\ros\fuerte\x86\stacks).
31 October, 2012
- Continued with ROS for Windows. Tried to install the three stacks from Freiburg in C:\opt\rowws\fuerte\alufr-ros-pkg. Installing it as a package doesn't seem an option (only Linux libraries), so I tried to do rosinstall. Yet, even when I called the env.bat, rosinstall was not recognized as command. It is also not in the list of commands that should work under Windows.
22 October, 2012
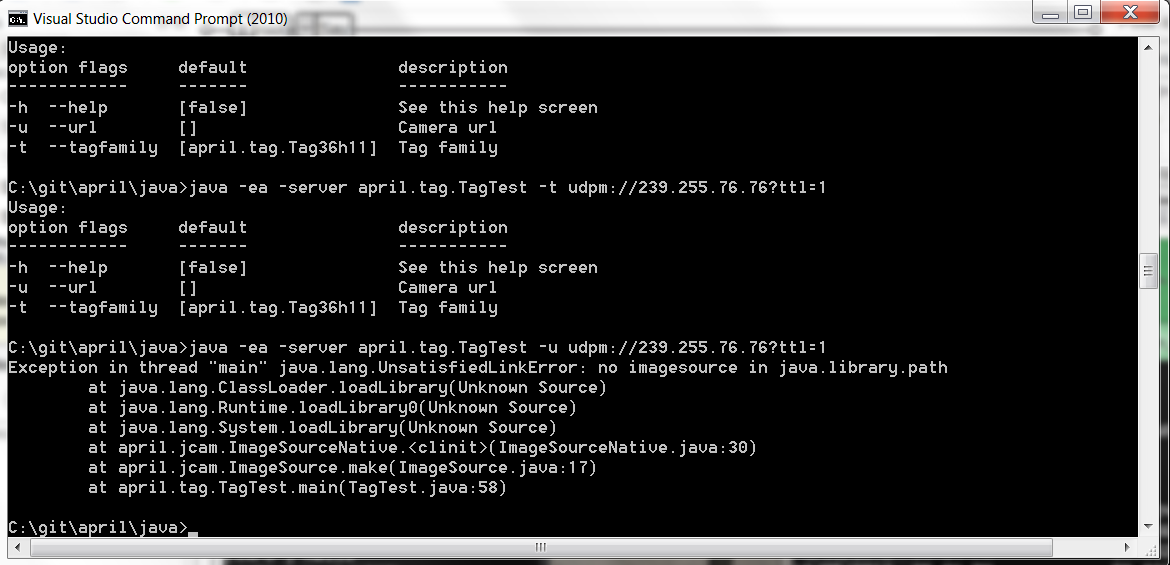
- Connected abeel to DNT server. Abeel has now address 192.168.1.48, while nb-udk has 192.168.1.24. Inspecting the video with java -ea -server lcm.spy.Spy -l udpm:239.255.76.67:7667?ttl=1 and that works. Calling java -ea -server april.tag.TagTest -u udmp://239.255.76.67:7667?ttl=1 gives java.io.IOException: Unable to open device udmp://239.255.76.67:7667. TagTest fails on ImageSource.make, which can be found in jcam/JCamView.java.
- Calling java -ea -server april.jcam.JCamView udmp://239.255.76.67:7667?ttl=1 gave same error. According to the April wiki, a real camera is needed.
- Mounted my Sweex Mini Webcam. With lsusb you get the usb-id, but that is not what JCam needs. The ArmLab_Part1.pdf showed that the expected url contains a protocol and ID. For my Sweex Mini Webcam (and probably most other webcams), this means java -ea -server april.jcam.JCamView v4l2:///dev/video0 With JCam you can select the different available formats (S910 is not understood, only the BlackAndWhite BA81). Can directly select a format by adding the parameter ?fidx=5 to the url (as suggested by the button 'Print camera URL').
- Looked in jni/jcam/image_source.c; four protocols are excepted (v4l2,dc1394,islog,pgusb). Tried to call JCamView with url pgusb:///dev/bus/usb/001/005 (the bus/device combination according to lsusb), but this fails. The april/jcam/ImageSource.java calls this four protocols via the wrapper ImageSourceNative.java. Additionally, it also knows the protocols (islog-lcm, file, dir).
- Scanned for subscription to image channels. Only found jcam/ImageSourceIsLogLCM.java. The expected message is a url_t, which specifies the location of the frame in the log. The only other occurence is the VideoPlugin of the Spy.
- Started implementing ImageSourceChannel.java. For the moment, the class uses the protocol, ignores the network (singleton login), but uses the variable "channel" (default CAMERA). So, java -ea -server april.jcam.JCamView udpm:239.255.76.67:7667?ttl=1?channel=CameraBottom should use the non-default camera of the Nao.
17 October, 2012
- Tried to start usarnaoqi.exe. Starting it from Sander's svn (Release and Debug) gave the error:
no simulator.xml found in C:\Programs\Aldebaran\v1.12.3\simulator.xml
Failed to initialize NaoQi: internal error.
- If I remember correctly, this had something to do with a different initialization between NaoQi versions.
- Found in UDK-2012-02\USARTools\UsarNaoQi a my_usarnaoqi.bat which works (with setting AL_DIR to v1.12\naoqi-sdk-1.12-win32-vs2008. Did the first assignment from Mike Beiter's book:
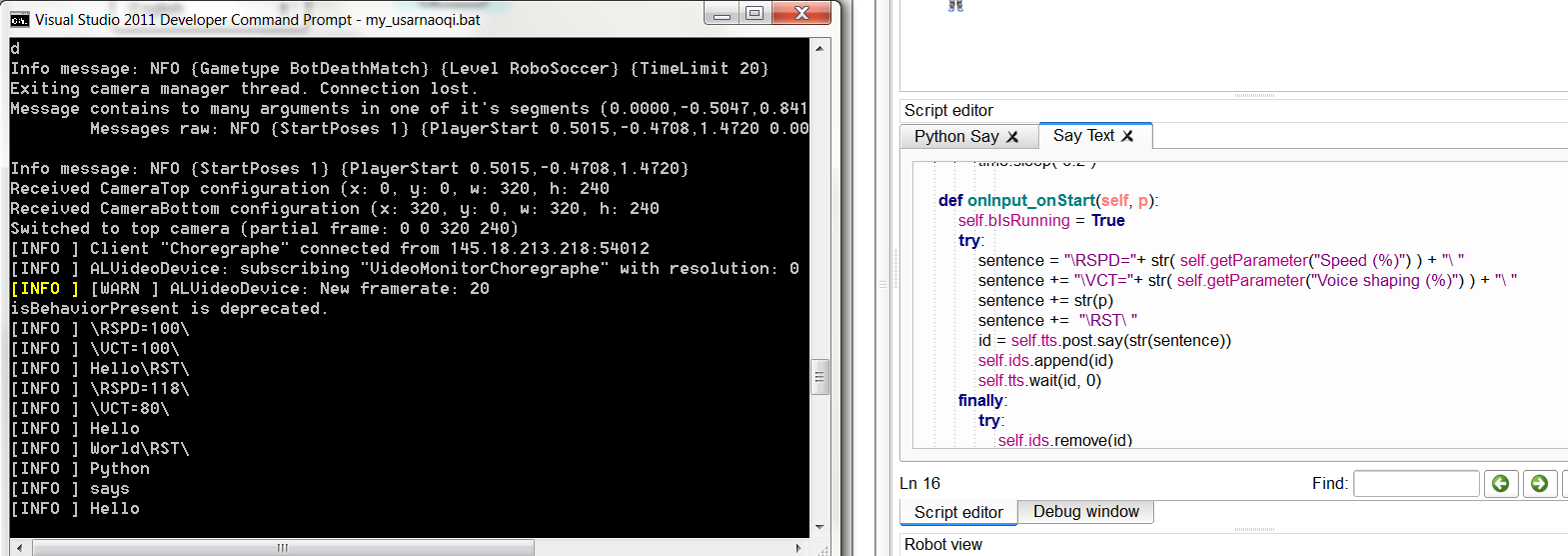
The Basic Task 'Hello World' (displayed in console, not send to soundcard). First the word 'Hello' with default voice shaping and speed, followed by 'Hello World' with modified voice proporties. The last output is the Advanced Task. As kan be seen, with the simple Python code just the text is sent (not the additional parameters sent). First chapter of Mike Beiter's book finished.
- Stopped usarnaoqi.bat Now started lcm_usarsim_proxy.exe -t Nao -l 0.5015,-0.4708,1.472 -w 2. First attempt failed on missing jcam.jar:
- Called ant build-jni. Modified build.xml and jni/Makefile to use nmake instead of make. Still, jni/common.mk only contains definitions for Linux and MacOS. Removed macros with spaces. Still nmake image_source.o fails (don't known how to make image_source.o). Seems related with my earlier attempts to find a native library for jgl.jar.
- Tomorrow I will first try it under Linux.
5 October, 2012
- Tried the SoccerFan demo on Rouge.
- The standup-behavior in named_behaviors results in a fall on the back. The 'Stand Up' in the Box library still works.
- Standing fear gives an error on PlayMusic: No module named altools. This seems te be a version problem. Rouge has NaoQi 1.12.3.
- Used File->Import Choregraphe 1.6 project. The LHand/RHand issue (range is between 0 and 1 since NaoQi 1.10) is automatically solved. The PlayMusic error is not automatically solved. Used the recent code of from \Choregraphe 1.12.0.62\share\choregraphe\libraries\box\default\Audio\Sound\Play Sound\box.xar as example. Now the Nao says Ieee. Still I receive an error message: [ERROR] hardware.mecalogger: ALMecaLogger ALSql::ALSql::exec
SQL error: no such table: inertial. Looked into the code, but couldn't fnd any reference to SQL, AlMecaLogger or inertial.
- The new behavior is called Anim_fear1_12.crg.
11 May, 2012
- Created a github account.
- Making a Git Clone with ToroiseGit didn't work (info/refs not found), but this seems to be due to fact that I tried to access only a subdirectory.
- Tired to do a git clone under cygwin, but I got an error from ssh (publickey permission denied). The command git remote add main failed withe error message (directory not a git repository (no .git)).
- Doing a full GitClone with git://github.com/Dutchnaoteam/Master.gitworked.
- Tried to Push my work. Relocated to git@github.com, but still no autentication method. Followed the instructions on win-setup, but it seems that I should use WinGit instead of TortoiseGit (couldn't find the place to set the key the id_rsa.pub I just created in my Cygwin-home).
- Followed the instructions on this page. The only difficulty was how to load the puttyGen generated key. Found out that in TortoiseGit->Config->Remote load key works if the key is still on the original location (inside cygwin directory). Loading the same file copied in the git directory didn't work.
22 April, 2012
- The submission to the RoboCup symposium was accepted. The reviewers asked for more non-soccer applications (RoboCup@Home or RoboCup Rescue). Pasargad has a working interface to the Nao, but no results published yet. I could not find source code of the @Home teams BORG and Radical Dudes.
- Looked at NaoShare. Downloaded the XBox Control program from Markus Häring from Augsburg University. Downloaded 64bits version of pygame. Yet, 64bits package was installed in site-package of 32bits python. Installed 32bits version of package.
- Still, pygame wasn't found as package. Adding C:\Programs\Python26\Lib\site-packages to the environment variable PYTHONPATH (as suggested by Python documentation) solved the issue.
- I could load the different behaviors in Choreographe. Yet, it seems that it loads the complete set of behaviors with behaviorProxy.post.preloadBehavior("BigBehavior"), which is not available. The first behavior when pushing ButtonA is 'Take Candy', which is also not available as separate behavior.
- Increased the ccycleindex = 1. The other three behaviors could be reached. Yet, the Nao has crossed legs and don't want to stand up. Should contact Marcus for missing behaviors.
- Tried the other Xbox controller. This program allows to play a game of soccer. Program crashed on ButtonRB kick("rightKicke.kme"). At singleGamepad.py:167, the AlMotion:angleInterpolationWithSpeed expected the same number of angels as joint names (22 given).
- Trying java-nao (from TU Delft). Compiled by combining all *.java files in one javac command. Renamed java-nao and called java nao.examples.example1. Got error Unknown module ALMemory in Nao.java:217.
- The example code was connecting to the ALProxyBroker socket 54010 instead of the Naoqi socket 9559. Now I got Invalid Content-Type. Could be an error message instead of SOAP message.
- Tried the official jnaoqi package. Got complaint that jnaoqi was not part of java.library.path. On Windows, this should not be repaired with LD_LIBRARY_PATH, but with regular PATH. System settings still not good, on the end did explicit set PATH=.;C:\Programs\Java\jdk1.7.0_03\bin;C:\Programs\Aldebaran\v1.12.3\jnaoqi-java-1.12.3\java\com\aldebaran\proxy. Now got complaint about 32-bit dll on 64-bit platform. Downloaded 32bits version of jdk1.6.0_31.
- Set path explicitly to jdk1.6.0_31. Now both java TestProxy and java MotionStiffness work in the directory jnaoqi-java-1.12.3\java (because there the directory com\aldebaran\proxy is located), but both programs return without any notification (or error).
26 March, 2012
- Experimenting with the new simulator-sdk-1.12.3-win32-vs2008. Made my own VC-solution, but program crashes (malloc) on initialization. Read readme.txt, but I am calling the program with correct argument share/alrobotmodel/models/NAO_T2_V32.xml.
- Downloaded cmake 2.8.7 and made an automated VC-solution. Cmake made in my VS-2008 prompt a VS-2010 solution. Yet, the program makes the same crash?!
21 March, 2012
- As indicated in roboresc Labbook, I installed the Feb 2012 version of UDK.
- Committed RoboSoccer world. I added UsarNaoQi binary to USARTools, but didn't commit it because usarnaoqi didn't work with NaoQi 1.10.52 or 1.12. Seems to depend on NaoQi 1.10.44.
- Combined with usarnaoqi.exe from Sander's trunk, the NaoQi 1.12 version works fine (tested standup behavior and presentation behavior). Unfortunatelly, the sound module doesn't work yet.
February 27, 2012
- Downloaded SimSpark v0.2.2 and rcsserver3d v0.6.5 from sourceforge.
- The SimSpark installer crashed at the end.
- Edited rcssserver3d.cmd, as suggested by manual.
- rcsserver3d.exe starts, but complains about existance of C:\Users\arnoud\.simspark, but loads spark.rb anyway. First ERRORS are about the OpenGLServer and TextureServer not found. Program halts at ERROR: no FPSController found at '/usr/scene/camera/physics/controller'.
- Calling the script with the option rcssserver3d.cmd --script-path C:\Programs\rcssserver3d\share\rcssserver3d\rcssmonitor3d.rb works. Script rccssserver3d.rb gives same error messages as before.
- Compiled ODE-library, but I don't see any executable / server.
- Starting the script rcsoccersim3d starts both the server and the monitor. Started also my rcssagent3d, and now I have my first Nao in SimSpark:
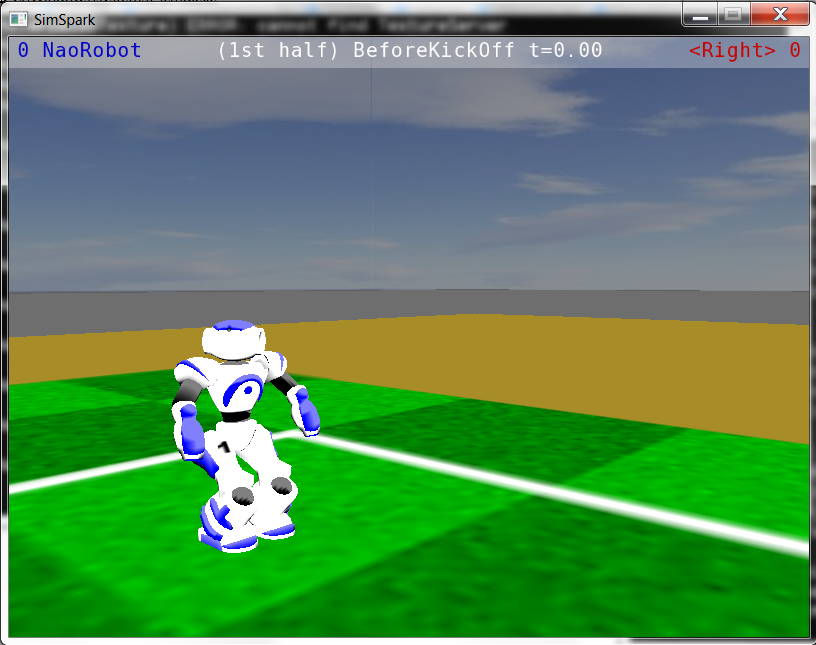
- Now I have to start to look what commands an Agent is sending to the server. Start reading the User Manual.
- Most interesting sample code is from Humboldt.
February 10, 2012
- Activated NaoSim on nb-udk. Interface is quite different, you have to drag a robot into an environment. Strange enough, I couldn't use the sitdown behavior, although the LogLevel of Choregraphe gives no warnings.
- Starting Endless walk works better (4 warnings). The Nao seems to walk, although the object is no longer visible in NaoSim?!
January 31, 2012
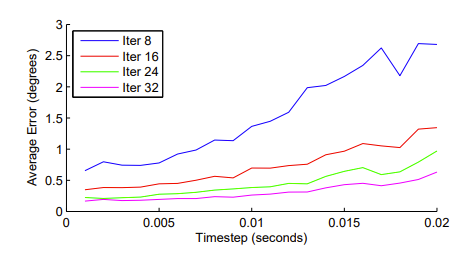
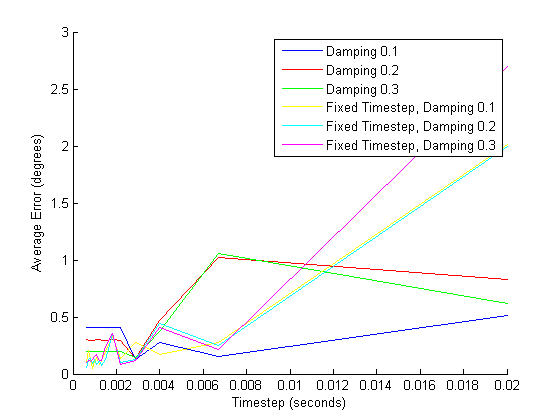
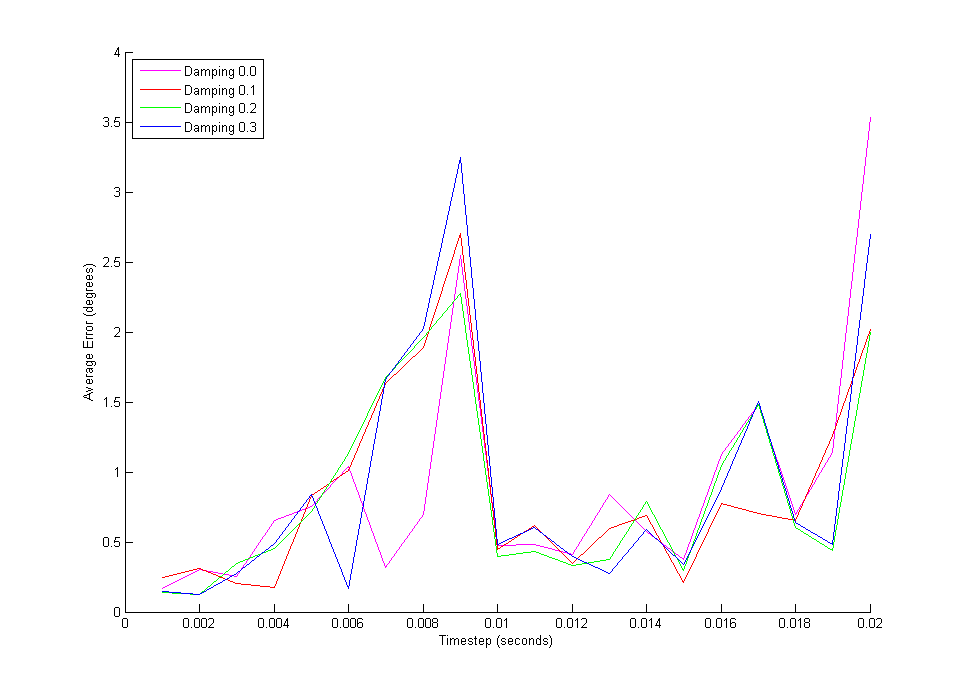
- Published the Permis paper.
- Part of the publication was a section about the PhysX time step. The initial figure had very course damping constants (0.0, 0.2, 1.0). The second figure concentrated on relevant values (0.1,0.2,0.3). Yet, the points on the time axis were widely spaced at the high numbers (logarithmic). The third figure solved this, but here it was clear that the relation is not monotonic, so this has to be studied in more detail.
January 18, 2012
- The student's project is described on the ThirdSight company site on this page.
January 11, 2012
- Tried again to launch Nao at my nb-udk. Still, the legs were twisted. Downloaded binaries. The exe itselfs fails (compiled with NaoQi v1.10, performs a request not available in NaoQi v1.12. The request I had commented out in the code), but with the script pointing to recompiled version it works:

Problem seems to be the missing xml-files (defaultconfig.xml and/or robocup.xml).
- In both cases NaoQi complains that it could not find PYTHONHOME (while this variable is set both by the system and the bat-script).
Previous Labbook