Labbook Dutch Nao Team
Error Reports
- Bleu hips are squicking.
- Nao's overheats faster when using arms than using legs.
- Bleu's left eye is not functioning.
Started Labbook 2014.
December 6, 2013
- Also flashing Nao 6.
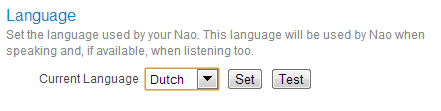
- In the mean time, I used Nao7 to test the NaoIntroduction. Changed the text into "Ik spreek nu Nederlands, but that was not reached because that text is only said when the language is Dutch. Added a SetLanguage box, but this one failed on missing ALSpeechRecognition.
- Added speechrecognition to /home/nao/preferences/autoload.ini
November 15, 2013
- Starting to flash Nao7. Downloaded the 64-bits flasher from Aldebaran (v1.12.5). Had already the atom-image. Cleared the USB-disk as instructed. Started flasher.bat as administrator. Selected factory reset. Flashed the disk. Put the disk in the Nao and booted the Nao by holding the chest button five seconds (until it gets blue), as suggested by Northern Bites. The Nao starts upgrading, which goes through four stages, as described by Aldebaran. The last phase (The front and rear half-circles are alternatively blinking), restoring the factory defaults, took quite some time (more than phase 2, which I expected to be the longest phase). Strange, it looks like the phases are executed in a different order. First the front half-circle was blinking, than both half-circles are blinking, then the ear is filled like progress bar. When the progress bar is full, the chest-button becomes white. Not much happens after that, so time to check what happened.
- I saw the Nao with Choregraphe, but could not connect. Later found that this was due to my settings of my wired-lan interface (with fixed ip). Rebooted the Nao, set my ethernet card to dns and could connect with Choregraphe and ssh:

November 6, 2013
- Preparing the presentation of the BNAIC paper. Pdflatex complaint about a missing font (mathkerncmssi10). Solution, suggested on StackExchange, to run updmap.
November 2, 2013
- Cleaned up some disk-space and was able to start OpenNao in a VirtualBox. Used the bridging setting as indicated at the bottom of the documentation. With the bridge I was able to connect Choregraphe to the virtual nao, although not all services were available:

November 1, 2013
- Installed Choregraphe 1.14.5 on nb-udk. Couldn't find the opennao image inside the distribution. Also couldn't find it on Aldebaran website.
- Luckely, I could find the software at the Developer site.
- Should also try to run OpenNao in a virtual box, as described here.
- Nao7 (orange) has a NaoTH configuration. Missing for Choregraphe are ALFrameManager, ALBehaviorManage, ALMotion, ALResourceManager.
Optional are ALMotionRecorder, ALVideoDevice, ALRobotPosture, AlMemoryWatcher, ALAudioDevice, ALTextToSpeech, ALBattery, ALSentinel, ALLauncher.
- Will try to flash it with v1.14.5.1. Got warning that no ftp-server was running on the server.
- Made the connection to Nao6. Still missing are the ALFrameManager and ALBehaviorManager. Optional are ALMotionRecorder, ALRobotPosture and ALMemoryWatcher.
FrameManager and MotionRecorder are switched off in /etc/naoqi/, behaviorManager and resourcemanager should be on. RobotPosture and MemoryWatcher are not available in this autoload.ini.
- Naoqi has vsftpd installed in /usr/sbin/vsftpd. The configuration-file can be found in /etc/vsftpd/vsftpd.conf. The server can be restarted by command sudo /etc/init.d/vsftpd restart.
With the ftp-server running, I could do a firmware update via Choregraphe (to Nao7).
- Restarted webserver on Nao6 by command (as root) /etc/init.d/lighttpd restart. Now I get a webpage, but contents display: 503 - service not available. Checked /var/log/error.log. lighttp complains about missing fcgi-server.
- Nao7 was not flashed: still had the v1.14.1 software with NaoTH. Looked at the /var/log/nao/head.log: there were some complains, so I added missing modules (including albattery). Now the robot directly shuts down once started. Time to try the flash from a stick.
- Executed new switch_naoth.sh script. The robot asks to be in an open space, but the internet adress is still 10.42.0.6.
- Started the correct script (in /home/nao/Config/switch_naoth.sh). After executing it as root, the config_eth0="0.0.0.0 0.0.0.0 && dhclient".
Connected robot and laptop to the sweex-box in the DCSC robolab. The laptop's ip is 10.46.0.9. Yet, the Nao's wired ip is still reported as 10.42.0.6. Rebooted, the Nao reports that it has configuration 10.0.0.6, although it has a wired connection.
- Could still connect via wlan, so manually edited /etc/conf.d/net. I switched off the eth0 line (with #), the default behavior is to listen to dhcp-server. Restarted the interface with /etc/init.d/net.eth0 restart. Now the wired connection gets its address from the dhcp-server of the DCSC lab.
October 5, 2013
- Performed yoga with Blue, but a lot of noices come out of his upper body. Stopped the behavior halfway.
- Tried to make a connection to Nao9. Starts up in soccer mode. Not visible inChoregraphe. Checked Netgear router, my labtop is the only one connected.
July 27, 2013
April 25, 2013
- Two new Nao's have arrived. They still have to be named. Their serialnumbers are:
- ALDR1109F004567 (dnt-marker right) with head ALDT1109F004505
- ALDR1109F004766 (dnt-marker left) with head ALDT1109F004506
March 15, 2013
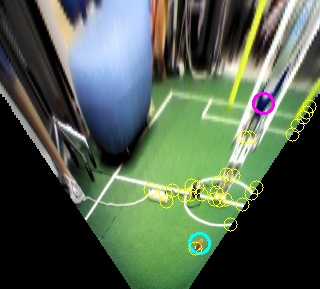
- Modified CreateDocuments such that the BirdsEye images were loaded. All 52 images were analaysed, although the angle of the head changes after the second image.
Should use another mask. Result is quite good:
 .
.
- CreateDocuments fails on line 264 (open file).
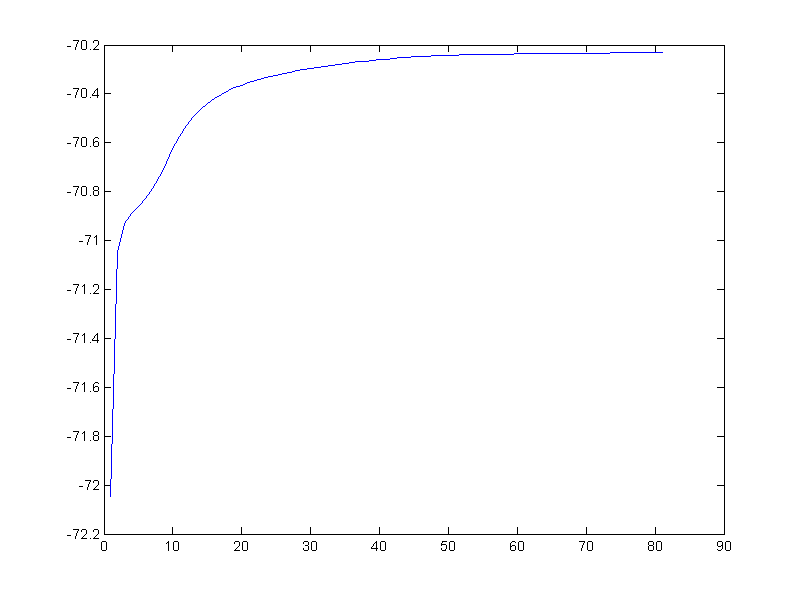
- With the directory for the DOCS made CreateDocuments works. Also pLSAify works (P(z) and L+ decrease to nearly zero after 500 iterations).
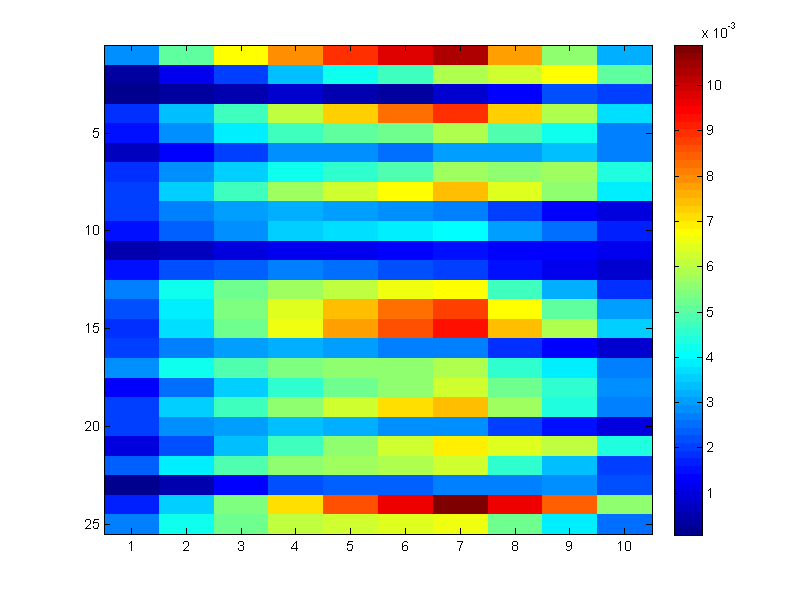
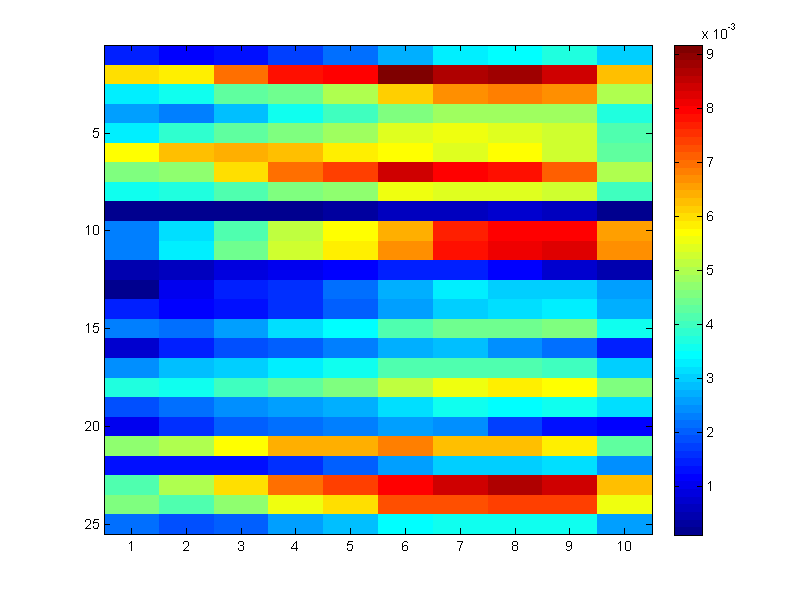
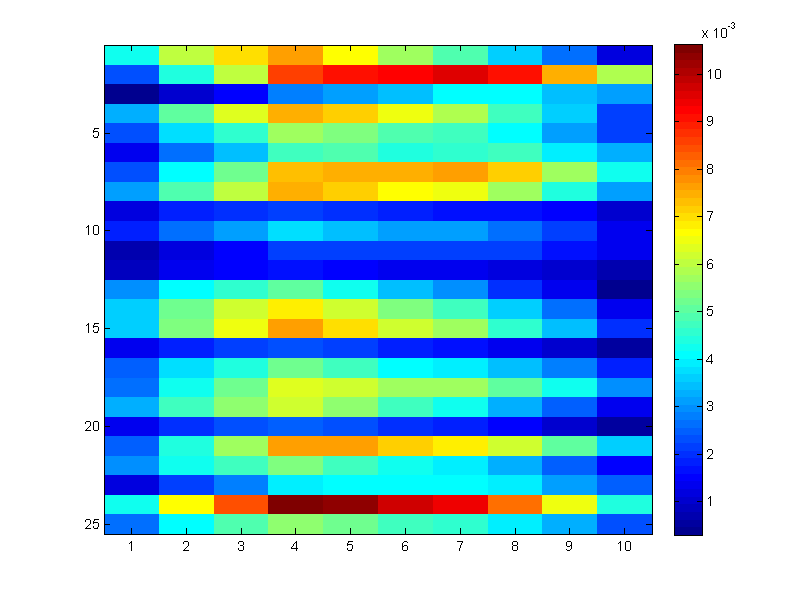
- pLSMify creates a DOC.mat in the top directory. Copied that the MatLab directory with the plsm code. Result is as follows:

 .
.
March 14, 2013
- Converted all images to BirdsEye view. Subdoc1 and 2 are recorded for a different angle than Subdoc0, so I will have to adjust the field-mask:
March 13, 2013
- Was able to make a mask, now only one Nao and ball are found:


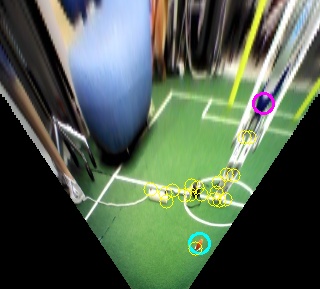
- The result is quite good, although also features on the edge are found. I should adjust the masks around the ball and nao to a perspective shape:
- I combined the field mask with the square mask around the ball and Nao. The result is promising:
March 11, 2013
- Amogh stripped the original author from the code, but seems to originate from Eric Johnson, University of Utah, April 2007.
- Changed the image size from 320x240 to 640x480. Result is much better:

- Made script AnalyseConverted, but Python 2.7.3 fails on import cv (no module named cv). Copied cv.py and cv2.pyd from C:\Programs\opencv\build\python\2.7 to C:\Programs\Python27\Lib\site-packages.
- This works (partly): cv2.cv fails to import numpy.core.multiarray.
- Installed the unofficial MKL-1.7.0-win-amd64-py2.7 binary. Yet, the MKL has to be bought ($ 499), so I downloaded the unoptimized code. The installer could't find Python2.7 (only 32bits installed), so I downloaded 32bits version (now Python2.7 is found in the registry).
- Also installed PIL from pythonlibs, and changed the import as suggested to "from PIL import Image".
- Finally need scipy, which has a dependency on numpy-MKL.
- First result, the ball is found (and a larger blob of wood). Also features are found, but around the bench (instead of the waistband):
- Looking at drawContours to create a mask for the ball. The Contours give the green-white edges (also interesting), not the field:
March 8, 2013
- Tested Amogh's Inverse Perspective Mapping on one of Auke's images. The main reads an image, but not really proceses it. Probably the code is used in one of the other directories. Will first check the Matlab code. Added a call to getWorldImage (as in Matlab code), but that is just a stub ("Har Har Mahadev!").
- With the matlab code something is happening, although with some artifacts:


March 7, 2013
- Looking at code from Auke's thesis. The file createDataSet.py should be run on a Nao, and contains the code to process the images:
- findFeatures: uses OpenCV's GoodFeaturesToTrack around ball and waistband. Is called from createDocument.
- calculateFlow: uses OpenCV's implementation of pyramidical
Lucas-Kanade. Is called from createDocument.
- createDocument: makes a directory ./Results/, calls findFeatures and calculateFlow. Is called by createDocuments, which actually saves the results.
- main: the main consist of a call to createDocuments, pLSAify and pLSMify.
- pLSMify: stores its results in ./Results/Distributions/DOCU and suggest to perform plsm.plsm_run( DOCU, 5, 10 ).
- For the bird-eye conversion I could look at this code.
- Also looked at the code of Amogh Gudi. Ported Matlab code for Inverse Perspective Mapping to C++. Unfortunatelly, the test image xx.png is empty.
- Tried to build program from Cygwin with make InversePerspectivMapper/fast, but fails on missing /usr/local/include/opencv/cv.h. No OpenCV under Cygwin.
- Made a VC2010.sln with command cmake -G "Visual Studio 10 Win64" -i ., after throwing away all files with dependencies to amogh. Had to the same inside C:\Programs\opencv to create the OpenCVConfig.cmake which was required due to find_package(OpenCV REQUIRED) in CMakeLists.txt. The solution didn't contain a project with the source-code, so made a new project and added the file (and the dependency on C:\Programs\opencv\build. Got the project running after this correction:
- Original:
int pos = 0;
for(double y = param.yRange[1]; y >= param.yRange[0]; y -= param.step)
{
iMappy.grid.y.at(0,pos) = y;
pos++;
}
- Corrected:
double scaled_y = param.yRange[0];
for(int pos = 0; pos < iMappy.grid.y.cols; pos++)
{
iMappy.grid.y.at(pos) = scaled_y;
scaled_y += param.step;
}
February 11, 2013
- Connected in the WebInterface of Blue my Nao to the WebServices. Bleu can now speak Dutch:
- Also installed Nao Life. Had to launch it at startup with the BehaviorManager. Looked at Behavior Manager Widget.
- Followed the instructions at git-hub and generated a public ssh-key. Added this to my NaoDev profile. Still, I couldn't get the code from src.aldebaran-robotics.com.
- The key was generated with GitBash, performing the clone from GitBash worked.
- Could not put the behaviors.html in /var/www (root access). Tested it with python script. Found out that the BehaviorManager is a window in Choregraphe. Made naos-life a default behavior.
- Also subscribed to Autonomous Life channel: ready for some surprises.
- Bas Terwijn could see with his Linux-machine my Android telephone (adb devices -l and do a adb -r install naomote.apk. Trying to connect to NaoMote. Should start the server first! Yet, I get an error (NaoMote is only supported for 1.12).
- You can open a crg-file with 7-zip. The problem seems to be related with flashVideoStreamer.py:
import gobject
gives the error: No module named gobject
- Added C:\Packages\glib-dev_2.28.8-1_win32\share\glib-2.0\gdb to my PYTHON_PATH.
- Added gobject.py from glib-package to project content. This gives 'No module named gdb'.
- Maybe I should try a pyobject distribution.
- Tried to find a Nao with NaoQi v1.12, The robots Rouge, 1,2,3,4 all had v1.14. Finally found BugsBunny (orange 2) with v1.12.5. Should add ALSpeechRecognition and ALTextToSpeech in autoload.ini (copy /etc/naoqi/autoload.ini to /home/naoqi/preferences and edit). The changes in preferences doesn't seem to have effect, so I tried again with the changes in /etc/naoqi. Still same error.
February 10, 2013
- Tried to install andriod tools. Yet, the adb.exe tool doesn't show up after I added sdk\platform to the PATH. Worse, my device doesn't show up when I type adb devices. Seems to be related that I can not select 'USB connected' on my device (instead I get WiFi settings).
- Nao Control is quite expensive (5.99 euro).
February 8, 2013
- Should try NaoMote to control my Nao with an Andriod phone. Should also try the Remote Control for the Iphone (and borrow my son's iPod).
- Following the readme instructions from Bas Terwijn, I installed Android Developer Tools bundle.
February 5, 2013
- Started testing Webots for Nao 7.1.0. After going to options and switching off the license server, I get a start screen:
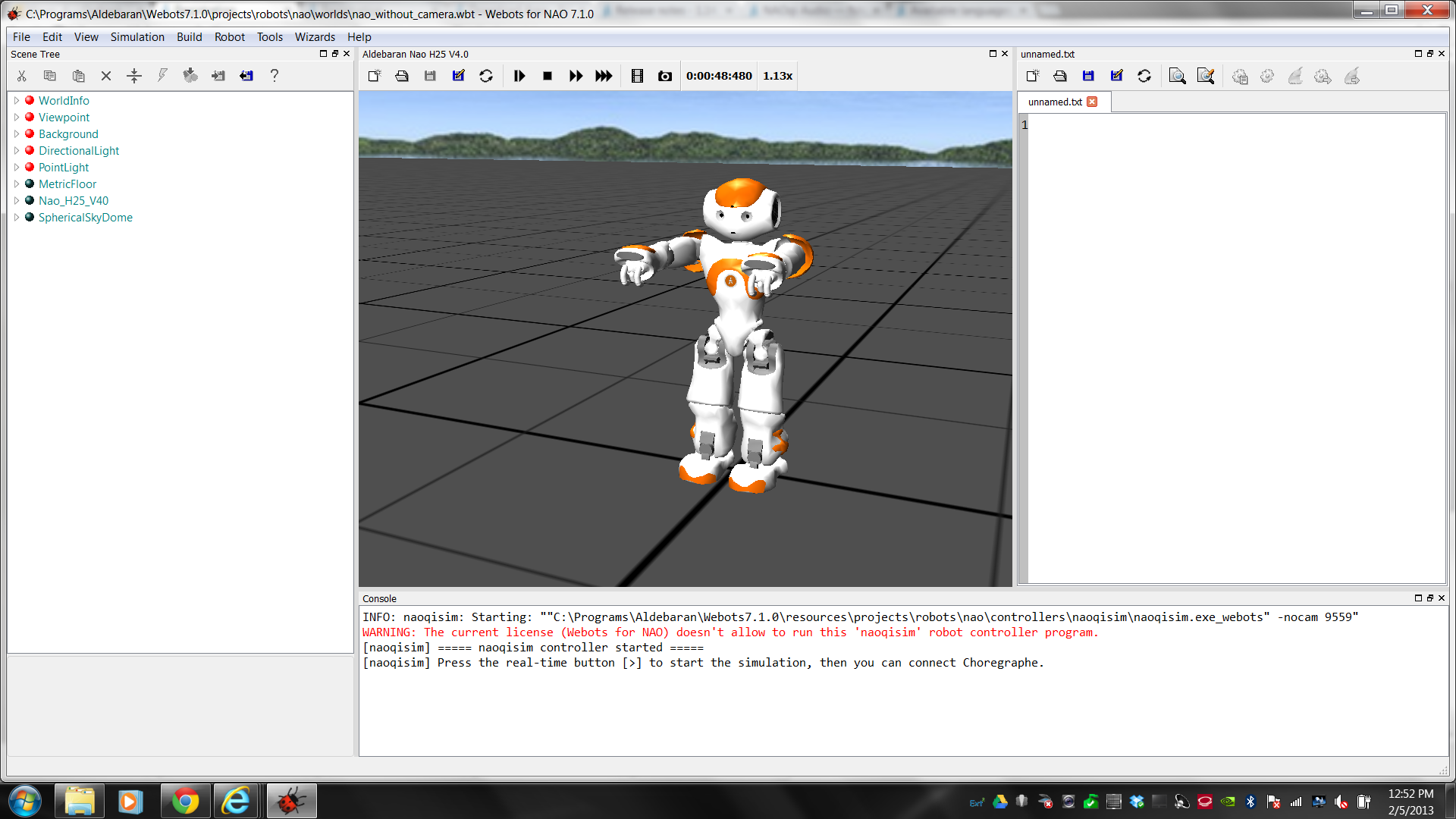
I tried to connect, but Choregraphe doesn't see this Nao (also not on 127.0.0.1:9559). Try a restart of the computer.
- Tried to reflash Blue via Choregraphe. Seems to work, but restart does not give much flashing (rather constant burning lights). Had to shutdown. When starting up I first get flashing lights (check flash-file). Second stage is a progress bar (dark ear, filling up circle to current percentage). Third stage is a normal boot (constant progress).
- Tried Bert Biermans's SitAndRelax behavior on the Bioloid box. Works fine, the only warning that I get is:
[VERB ] behavior.manager: DefaultBehaviors preference file could not be read: ALPreferences::readPrefFile
Could not find preferences file for module: DefaultBehaviorsLooked in:
/home/nao/.config/naoqi/DefaultBehaviors.xml
/usr/etc/naoqi/DefaultBehaviors.xml
/usr/etc/DefaultBehaviors.xml
/usr/preferences/naoqi/DefaultBehaviors.xml
/usr/preferences/DefaultBehaviors.xml
/etc/naoqi/DefaultBehaviors.xml
January 31, 2013
- Experimented with anim-library. Tried:
- AutoFormat
- Binoculars
- Bored
- BreathLoop (subtle)
- CallSomeone (ends before the sentence "Hey guy! Come here!" is ended). Increased endtime from 160 to 170, which solves the issue.
- CatchFly (long sequence)
- Cramp (funny)
- DriveCar (more complex than expected: including switching gear, waving, etc)
- FalseStop (1 as in AutoFormat, 2 quite spectacular (many colors).
- Fart (lifting its but).
- Fitness (mainly moving arms).
- GeoCircle/Square/Triangle.
- The Music doesn't work on the Nao (no warning).
- Oar (that looks more on fitness)
- Phone (nice vibration)
- Pong
- Poorly seated (shifting on butt, could be handy).
- Relaxation (could be handy as idle behavior, together with breathing).
- Robot (sitting straight).
- Think.
- WakeUp
- Tried a fast standup, but that doesn't work for a Nao4.
- Standard StandUp fails (Error on missing ALRobotPosture) for Choregraphe 14 and NaoQi 1.12.3.
- Luckely the named behavior from DNDD stil works (although Choregraphe had to convert the old style file). Loaded as directory (had to rename standup.xar to behavior.xar).
- Tried some standing behaviors:
- FunnyDancer goes wrong, even when the robot is supported.
- FunnySlide is OK
- Tried Innocent and Knight
- With KungFu the Nao falls backwards.
- Tried LaserGun and LoveYou
- Tried Monster and Pee
- Robot1 (starwars) and Robot2 (I will never be a green robot!)
- SpaceShuttle (very dangerous).
January 14, 2013
- Testing the LaserHead with an V3.3 body. The robot starts up, although it complains that it software should be updated. The boot seems to be complete (blue ears), although the Nao doesn't say its name. The webserver shows that the version is 1.10.10 (and the robot is inactive). I couldn't connect via Choregraphe (both Wind and local are visible, but without NaoQi).
- Tried to do create a new usb stick, but the flasher (v1.12.3) complained that it could not write on the stick (file-system detected), even when starting up as admin. I enabled Ext2fsd by starting manually the service. Afterwards enable Ext2fsd autostart and restarted my computer.
- After an restart (without accessing the drive) I could flash the disk (this time I didn't saw a drive letter assigned according to the flash window). Strange enough, my touchpad and wireless mouse don't work anymore). After the flash my wireless mouse worked again. The robot booted and performed the wakeup routine.
- I tried to look at the Choregraphe Memory Watcher. Device/Laser/Value is there, but all values are zero.
- NaoQi stopped after my request (chestbutton flashing yellow), could restart it from the commandline (naoqi), but I see many warnings:
[INFO ] Starting ALVisionToolbox
[WARN ] This module is deprecated in version 1.14. Please use the modules ALPhotoCapture, ALVideoRecorder, ALBacklightingDetection and ALDarknessDetection instead.
RN ] ALSentinel::enableCheckRemainingRam() is deprecated since 1.14. This feature will not be available anymore in further versions.
[INFO ] Starting ALSentinel
[WARN ] ALSentinel::enableBatteryMeasure() is deprecated since 1.14. This feature will not be available anymore in further versions.
[WARN ] ALSentinel::batteryChargeChanged() is deprecated since 1.14. This feature will not be available anymore in further versions.
[WARN ] ALSentinel::onBatteryMeasure() is deprecated since 1.14. This feature will not be available anymore in further versions.
[INFO ] ALSensors received subscribe from ALSentinelHotJoinDetected
[INFO ] ALSensors received subscribe from ALSentinel
[INFO ] ALSensors received subscribe from ALSentinelChestButtonPressed
- Checked for differences:
[core]
albase (both)
launcher (v1.14) vs framemanager (v1.10)
albonjour (v1.14) vs connectionmanager (v1.10)
[extra]
#dcm_hal (v1.14) vs dcm_hal (v1.10)
alresourcemanager (both)
leds (both)
videoinput (both)
sensors (both)
robotmodel (both)
motion (both)
robotposture (both)
redballtracker (v1.14)
redballdetection (both)
motionrecorder (both)
audioout (both)
framemanager (v1.14) vs [core] framemanager (v1.10)
pythonbridge (both)
behaviormanager (both)
memorywatcher (both)
alnavigationinterface (both)
navigation (both)
facedetection (v1.10)
visionrecognition (v1.10)
landmarkdetection (v1.10)
darknessdetection (v1.10)
backlightingdetection (v1.10)
photocapture (v1.10)
videorecorder (v1.10)
visiontoolbox (v1.10)
alvisualcompass (v1.10)
movementdetection (v1.10)
audiodevice (v1.10)
audiorecorder (v1.10)
audioin (v1.10)
mecalogger (v1.10)
sentinel (v1.10)
launcher (v1.10) vs [core] launcher (v1.14)
allaser (v1.10) !!!!! added to v1.14!
infrared (v1.10)
altelepathe (v1.10) !!!!! added to v1.14!
store (v1.10)
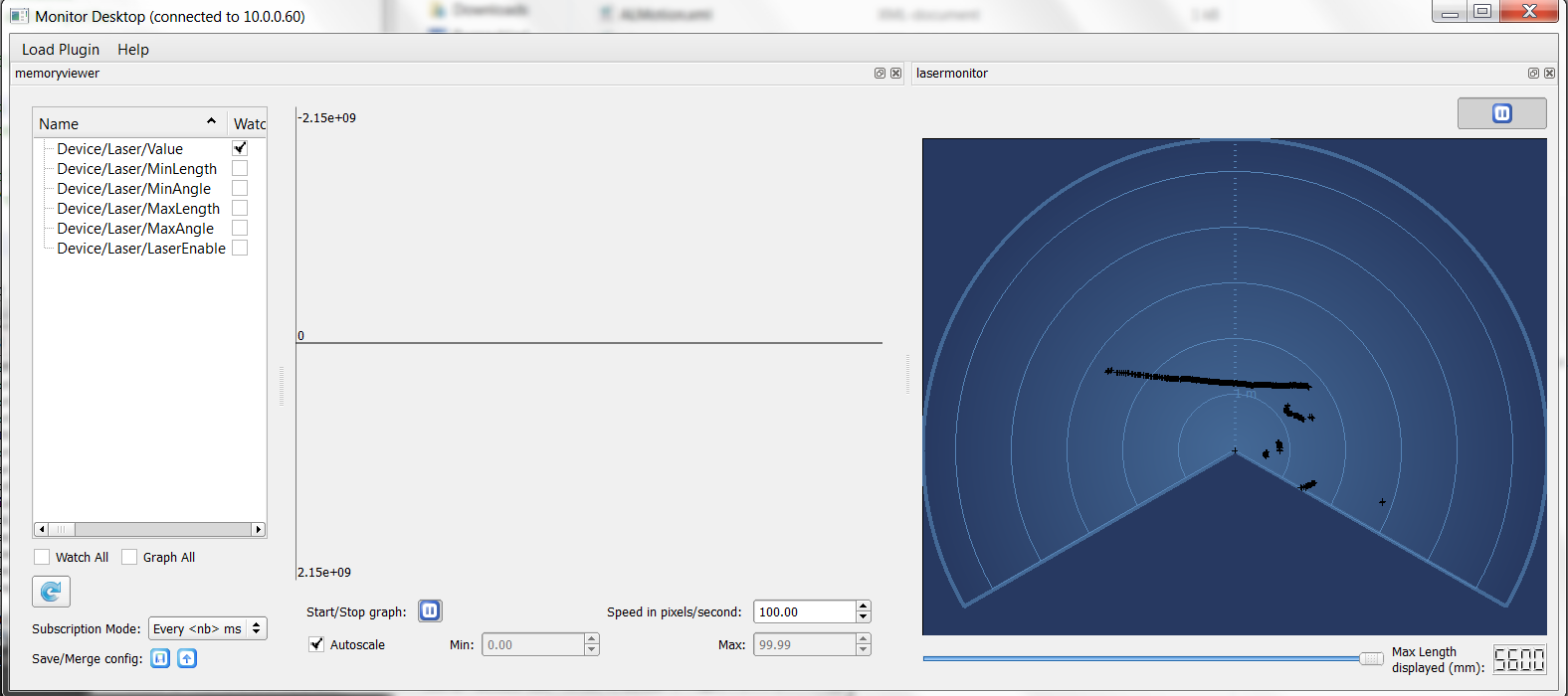
- Installed the default v1.14 autoload.ini on /etc/naoqi (via starting service of Ext2Fsd), with the allaser and altelepathe modules added. Now I see the values of the laser-device change in the MemoryWatcher.
- Also started Monitor (good old Telepathe). Loaded LaserMonitor plugin. Got measurements:
- Tried to add wireless network via webinterface, but both wired and wireless connection are not visible. Should try to add connectionmanager.
- Now NaoQi doesn't start up. Did it manually, received the following errormessages. At the end, the Nao switched off (out of battery).
[INFO ] Starting ALAudioPlayer
Failed to launch ALAudioPlayer module: ALProxy::constructor
Module 'ALAudioDevice' not found.
[INFO ] Starting ALTextToSpeech
Failed to launch ALTextToSpeech module: ALProxy::constructor
Module 'ALAudioDevice' not found.
Navigation could not create all the necessary proxies. Error : ALProxy::constructor
Module 'ALTextToSpeech' not found.
- Also the Language is not set yet. The network comes further. Get also two warnings (from queries from webinterface?!). I have the feeling that the webinterface on the nao is outdated.:
[WARN ] getBehaviorNames is deprecated.
[WARN ] getUserBehaviorNames is deprecated.
- Now also see why NaoQi stops:
[INFO ] NAOqi has been interrupted...
- Moved the AudioDevice to [core]. Now it is started as one of the first services. Only one complaint:
[WARN ] Error occured during startup: ALProxy::constructor
Module 'ALAudioRecorder' not found.
- Will try a clean setup. The webinterface seems to be in /var/www
- Did clean flash (overwrite with defaults). Still, I could not get the networks in the webinterface. Looked at the code /var/www/naoweb/services/network.py. The code tries to connect to the ALConnectionManager, which is started in autoload.ini. Should remove Sentinel and VisualToolbox.
- Without Sentinel and VisualToolbox naoqi starts without warnings (except one about Device/Laser/Value):
...
[INFO ] Starting ALTelepathe
[INFO ] ALSTORE - 1.3
[INFO ] Starting ALStore
[INFO ] Update subscriptions
[INFO ] Check for updates...
[INFO ] Finished check for updates...
[INFO ] Loading "/home/nao/naoqi/preferences/autoload.ini"
[INFO ] NAOqi is ready...
[INFO ] Client "Choregraphe" connected from 10.0.0.59:54011
[INFO ] Verbosity set to 4
[WARN ] The key Device/Laser/Value could not be found, but it will be watched as soon as it becomes available.
- Connected with Internet Explorer to the Nao. This time the Network page comes up (although the password was scrolled out of reach). I could make a wireless connection, and the Nao reconnects after reboot. Network page now also works for Chrome:

- Looked at the summerschool assignment.
- Tried to update BugsBunny from v1.12.5, but Choreographe lost the connection after given the command. Although the ethernet connection was busy, I couldn't connect anymore.
- Looked at the first assignment. Quite complex. Probably Mike Beiter's first assignment is better choice. Started one of the ITSAcademy MacBooks. Choreographe 1.12.5.3 is installed on that machine.
- Connected to Henk (v1.12.5). Could only select English and French. Connected to Wind (v1.14). Also only English and French.
- According to the documentation, the new Acapela engine is only available locally. Made a testspeech.py. Only Kenny (English male child) and Julie (French female) are available.
Previous Labbook