Labbook Dutch Nao Team
Error Reports
The head of Princess Beep Boop (Nao4) crashed twice when an ethernet cable was plucked in, but this problem disappeared after flashing. Seems OK 13 December 2016.
- Julia has a weak right shoulder (December 2016).
Bleu hips are squicking. Seems OK September 2015.
- Bleu sound falls away. Loose connector? September 2015.
- Nao's overheats faster when using arms than using legs.
Blue skulls is broken at the bottom: should remove its head any more.
Blue has a connector at the front which is no longer glued on position. Couldn't find a connector position.
Started Labbook 2019.
November 19, 2018
- My arnoud@science account still has a number of (DNT / RoboCup) documents from the period 2010-2013.
November 12, 2018
November 5, 2018
October 9, 2018
- The NAOqi v2.8.2 robots (version6) have a new webinterface, which is missing the interface to the old interface (advanced/#config), but also is missing the wizard to set the name.
- Solved it from my jupyter notebook: system_proxy = ALProxy("ALSystem", "nao.local", 9559); system_proxy.setRobotName("sam") after rebooting I could login to sam.local.
October 6, 2018
- Try to reach Brooke, but that was harder than expected. Brooke nicely says it name, but could reach it via wired ethernet. Brooke also connects wirelessly, could ping the machine, but couldn't ssh the robot nor reach it trough the webserver. Volume should be increased.
- Added export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/usr/lib/x86_64-linux-gnu/ to ~/.bash_profile, otherwise ssh complains about the wrong version of libcrypto.so.
- Connecting nb-dual to robolab instead of eduroam solved this issue. Increased the volume to 60%. Saw that 44 applications were ready for updating, including Dutch Language. Waited with updating for the moment.
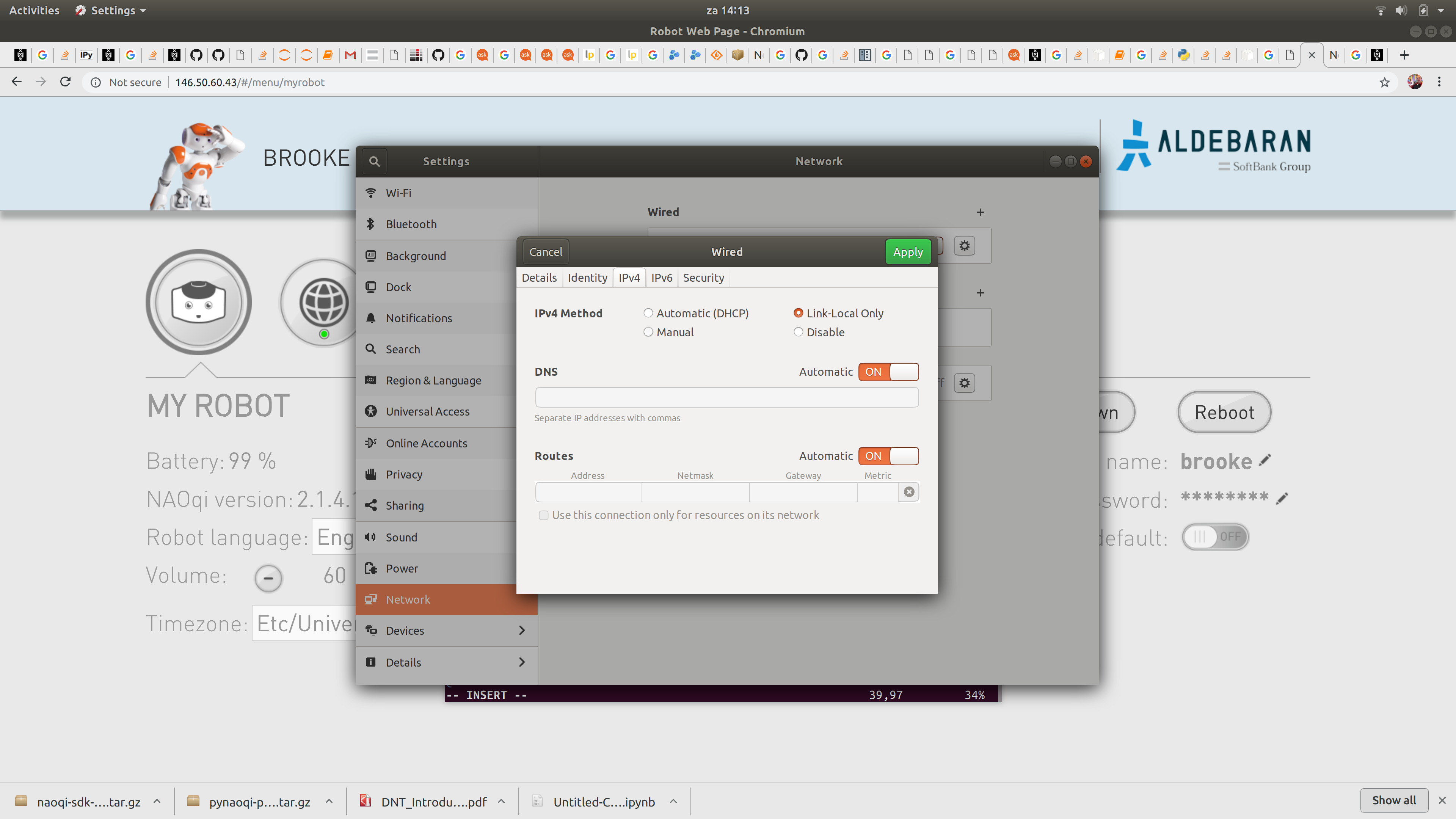
- Found out that I couldn't connect via the wire, because I only had a IPv6 address, no IPv4. Setting the IPv4 method to Link-Local Only solved the issue (was Automatic). Now I could connect to the 169.254 ip-address and brooke.local.:
October 5, 2018
- Installed on nb-dual the python NAOqi SDK (version 2.1.4.13). Yet, libboost is part of the ubuntu core, installing earlier versions is not available (checked by apt-cache showpkg libboost-all-dev, because in principal you want apt-get install libboost-all-dev=1.55.0.2. No ppa are available on launchpad for bionic, so you should install it from sourceforge, acoording to boost). Yet, this ,a href=https://github.com/MODatUniSA/naoqi-docker>docker project (for Ubuntu 17.04) gave the trick to install the libboost1.55 from C++ SDK). After adding the C++ lib-directory to environment variable LD_LIBRARY_PATH, I could do from naoqi import ALProxy://github.com/MODatUniSA/naoqi-docker.
- Adding the path to JUPYTER_PATH didn't help, but I could load ALProxy in my Jupyter notebook with sys.path.append("/home/arnoud/packages/aldabaran/pynaoqi-python2.7-2.1.4.13-linux64"). With "~/packages" this command failed.
- It would be interesting to see if this can be combined with a virtual machine, but unfortunatelly I only have opennao-vm-2.1.0.19.ova, not opennao-vm-2.1.4.13.ova.
- Tried to mount opennao-vm-2.1.2.17.ova in March 2016, but the image couldn't mount its root-disk (on nb-ros).
- Installed virtualbox on nb-dual and mounted opennao-vm-2.1.0.19.ova. Could login as user nao. Could also login via ssh (with port 2222). Tried to connect to the virtual nao, but there is no /etc/init.d/naoqi, so it is not strange that a connection with ALProxy is not possible. The virtual nao is meant for code development.
September 19, 2018
- Brooke is back, after six months at Aldebaran. This is the detailed repair report:
right arm: broken shell
left arm: broken shell
low camera: defective
Left Ankle Pitch : too loose -> gears replacement
Right Ankle Pitch : too loose -> gears replacement
Left Hip jeu : too loose -> gears replacement
Right Hip Roll :too loose -> gears replacement
Right Elbow Roll : cracking noise -> gears replacement
September 12, 2018
- Thanks to HWTK Caffe is now working on the Nao robots. Yet, the previous honours-study used Tensorflow, so the network should be converted first. A list of converters is available on github. The cafe_translator.py still exists, only the link should be updated.
June 21, 2018
March 28, 2018
- Updated Nao administration with new robots Wall-E and Eva, who will serve our team until the new v6 robots will arrive in the summer.
March 19, 2018
- Updated Nao administration with service request for robots Mio and Brooke.
- Asked the Technology Institute to repair Carlos with the left leg of Patterson.
Previous Labbook