The head of Princess Beep Boop (Nao4) crashed twice when an ethernet cable was plucked in, but this problem disappeared after flashing. Seems OK 13 December 2016.
Julia has a weak right shoulder (December 2016).
Bleu hips are squicking. Seems OK September 2015.
Bleu sound falls away. Loose connector? September 2015.
Nao's overheats faster when using arms than using legs.
Blue skulls is broken at the bottom: should remove its head any more.
Blue has a connector at the front which is no longer glued on position. Couldn't find a connector position.
Using Choregraphe to update the system seems to work, but although I have selected Factory reset the DNT code is still there.
Made a flash stick with Flasher 2.1.0.19 (starting the script as admin). The info message is that this an image for a Nao v4 (atom). Yet, the v5 has also an atom motherboard.
Flashing with the stick (front button 5sec), works. Julia and Bertha are back to Factory settings. Progress can be followed as described:
Renamed the robot julia and checked if it could do Tai Chi. Good enough.
Gave the webinterface account, still the app-tab never makes any progress.
Bertha gave the best Tai Chi demo of the day. Also Beep Beep Bop deed well (connected as nao.local).
September 14, 2021
Found two flashers (v1.12.5 and v1.10.3), but no NPO.
Most complete archive that I found was on my home-computer, with an opn for v2.1.3.3 and v2.1.2.17.
September 13, 2021
Looks like Julia and Bertha needs to be flashed. Couldn't find directly an ISO for v2.1.4.13.
Mio is back from Nieuw Utrechts Toneel. Tai Chi could still be done (with some support with the last bend.
Mio is now at Nana's home.
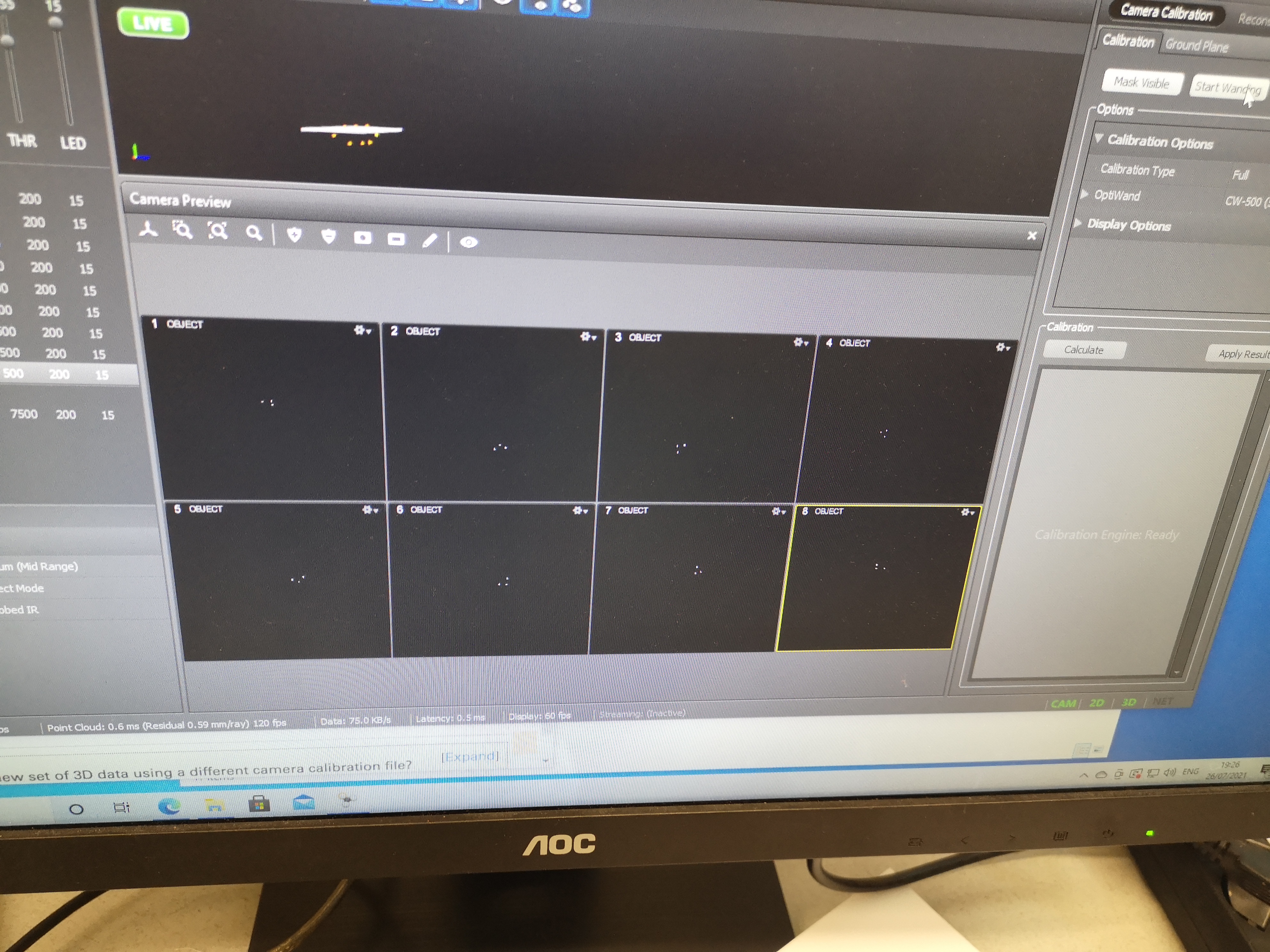
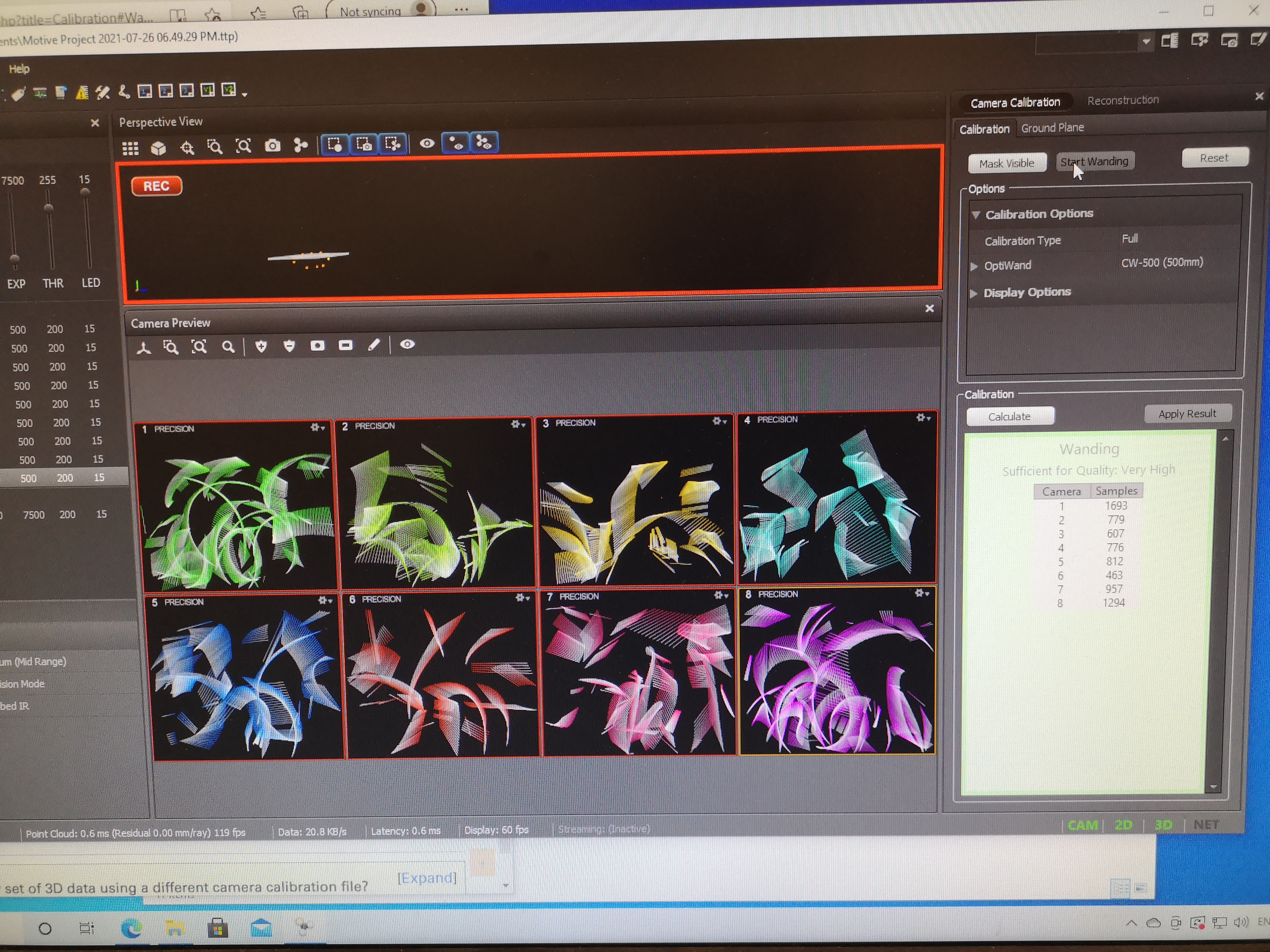
July 26, 2021
Mounted the Optitrack USB-hub and connected the 8th Flex13 camera to this hub.
I found it handy to first lay the calibration square CS-200 in the center, to be sure that all camera's had that point near the center. Another option is to do this check for multiple markers, to be sure that the whole volume is covered, as suggested in hardware manual.:
After that I did a round with the wand, and reset the ground-plane with the calibration square:
July 21, 2021
Brooke, Mio, Tom and Jerry are borrowed to Nieuw Utrechts Toneel, for their play 'Nooit meer werken'.
July 1, 2021
Mio gives an direct shutdown with July 2017 battery, but starts up with a Pre V6 battery (UvA 3).
That battery is depleted in seconds. Tested with power connected.
Tai Chi goes well to left, Mio falls to the right.
Walking goes, but with a lot of waggling. After 60cm the robot falls.
Tried Tom with the same battery. Tom had the April 2018 battery.
Tom also starts up, and even performs better than Mio. On the flat floor, it could even walk the full 1m.
With the same battery, I could do the same experiments with Brooke, even while the Zora environment was running on top of NaoQi. Could not ssh to Brooke. Had to use the Zora interface to shutdown.
Next Princess Beep Boop. No warning markings. No problems with Tai Chi or walking. Only strange enough robolab is not visible for this robot.
Removed power from April 2019, direct crash (not even shutdown).
Next is Julia. Marked with foot contact and right shoulder. Julia is running NaoQi 2.1.4, but there is also DNT code. Julia is not saying its ip when the chest-button is touched (sound off?), I could connect via Choregraphe, but no video, nor reaction on wakeup. Can login. Can connect via webinterface, but no pages are loaded. Mounting battery #3 with tape seems to work.
Checked Bertha, same status as Julia.
Moved the robocup.conf from appa.local. After that I could connect to appa as nao.local.
The wizard is hanging again. Checked version with page nao.local/advanced/#/. Version of NaoQi running on Appa is 2.8.5.11. Appa can't connect to the wireless network of robolab.
Tested Mio with pre-V6 battery, didn't deplete directly. Ready for Utrecht.
Tested Tom with pre-V6 battery. Tom complains directly on hot motor. Battery was not fully loaded yet. Looses one marking during testing. Marked as 'not bad'. Reserve for Utrecht.
June 30, 2021
Checked Jerry at home. Jerry also uses NaoQi 2.1.4.13, but could wake up without any problems fro Choregraphe 2.5.10.7. So, the problems yesterday were due to the batteries.
Jerry could execute Tai-Chi with some manual support. Without support Jerry falls when doing the 2nd leaning to the right.
For the Nao6, the current version is NaoQi 2.8.6.23. Last year I used NaoQi 2.8.5.10 for Behavior-Based robotics.
The release notes can be found here. Note that several deprecated APIs have been removed.
Didn't had an Install backup on my workstation, but luckily I had on my home computer. Uploaded v2.1.4.13 to my network drive. Unfortunatelly, Choregraphe-suite was not part of it (only pynaoqi). The last one with Choregraphe suite and system-image is v2.1.3.3. Note that the Choregraphe was part of naoqi2.1.4.13 (two directories with overlapping content).
June 29, 2021
Checking the v5 robots with Choregraph 2.5.10.7
Tom still directly shutdowns.
Next e-wally. e-wally uses 2.1.4.13, and is marked with 'no stiffness right hip roll'. e-wally dies when giving a wake-up signal.
Eve is marked 'left ankle pitch stuck'. Ankle can move freely. Dies directly after booting.
Mio has no markings. Mio also uses 2.1.4.13 and shutdowns at the wake-up signal. Try another Choregraph.
Also try Brooke. Marking no longer readable. Brooke and Julia are the oldest v5.
Brooke runs the zora environment. Connected by cable, because only Amsterdam Science Park was visible. Connected to robolab as hidden network. Brooke said its new ip-adress, but this comes not visible in the dashboard. Tried the children dance 'If you are happy', but robot died when start moving. Should try older battery and screws instead of tape.
June 2, 2021
Added the new robots nao24 and nao25 to Nao administration. The students are asked to give them proper names.
May 27, 2021
Cleaning up the Optitrack PC in the lab. It has number U020061, and is no longer connected to the UvA network.
Default boot gives Ubuntu 16.04. Not much data in the useraccount robolab, only the OpenCV for Ball Detection tutorial from SPQR, in ~/Documents/Jim.
This partition is including /opt/ros/kinetic.
May 17, 2021
Did measurements on the signal strength with Nao6 Sam in the hall C0.
Used example: skipped modifying /etc/wpa_supplicant.conf (control interface could not be found in /run/wpa_supplicant, could have tried /var/run/wpa_supplicant).
Became root with su and started wpa_supplicant -iwlan0 -Dnl80211 -c/etc/wpa_supplicant.conf -B, which gave my interactive control (remove /var/run/wpa_supplicant/wlan0 manually if this persists).
With the commands scan and scan_results I could inspect the signal strengths of all the access points in range.
March 29, 2021
Rogier is looking into converting the YoloV4 models to ONNX format.
The ONNX format is supported by OpenVINO, although no pretrained YOLO models are available.
March 9, 2021
With a little bit support, Ferb was able to tell the whole Starwars story, with the pml loaded from Choregraphe 2.5.10.7.
Installed Choregraphe 2.8.6.13 on my Windows partition of nb-dual. Could both load the Starwars from pml as Anger_1_modified from crg.
Changed the battery of Tom, still complains that battery is fully empty (so shuts down directly after booting).
Instead started working with Jerry. Did a ssh, naoqi --version indicated 2.1.4. Used su to become root, and create /etc/udev/rules.d/80-movidius.rules as specified by DepthAI.
Looking for the Naoqi cross compilation. Cross compilation is not available for Windows, and only tested for Ubuntu 16.04.
Created qitoolchain create cross-atom ~/packages/ctc/toolchain.xml (88 packages).
Went to the myfirstexample directory, did qibuild configure -c cross-atom followed by qibuild make -c cross-atom. Secure copied the executable in build-cross-atom/sdk/bin to jerry, and it executed without problems!
February 19, 2021
Connected with Choregraphe to Sam . Choregraphe complains that the version of Choregraphe (2.5.10.7) is not compatible with the version of NaoQi on the robot (v 2.8.5.10).
Tried from Augsburg Emotions Anger_1_emo, which failed to load.
The next one (Anger_1_modified) works fine (File-Import project from CRG file).
Anger_2_emo fails to load again, Anger_3_emo is executed, but robots fails backwards.
Looked in the difference between Anger_1 and Anger_1_modified. Both *.pml files have format_version="4".
Looked in the behavior.xar For Anger_1 the xar version was 1, the modified xar version 3. Yet, I can load it withouth problem as recent file (also when xar version is still 1). Yet, execution fails on python import of the module altools.
With Disgust_1_emo Sam also fails backwards. With Disgust_2_emo Sam waggles a lot, but keeps his footing (with difficulty).
To be able to Load Fear_1 and Fear_2, I had to modify the behavior.xar again. Yet, both fail on import altools.
Same for Joy_1 and Joy_2.
Looked into the altools problem before (September 18, 2015. The Aldebaran Behavior Complementary Development Kit from 2010 is no longer available.
The project files in named_behaviors are *.cpr, while Choregraphe can only load *.crg files.
Modified a *.crg file of Augsburg Emotions. When the xar is renamed behavior.xar, Choregraphe can load the file. Standup as behavior works!
After some puzzling the emotion A bit Happy also works (without sound).
Loading SpaceShuttle\behavior.xar as Behavior gave an error (without specifying which error).
Loaded the crg StandTalk, which works fine.
Loaded the starwars.crg, which works (but Sam falls again).
February 14, 2021
Looking for the emotional library of the Nao. In September 18, 2015 I uploaded a number of emotions to Blue from a Linux machine.
The link to the github link no longer exist. This 4 year old tutorial for Romeo could contain part of the Aldebaran Behavior Complementary Development Kit.
On my old nb-dual Windows partition, I have in G:\activities\DNDD both .\NaoShare\AugsburgEmotions and .\named_behaviors (March 8, 2018). In .\Behaviors\ I have starwars.crg.
Had in March 2017 problems to let the robot move with the emotions.
In September 15, 2014 I used several emotional behaviors in NaoQi 1.14 on Blue.
On January 31, 2013 I experimented with anim-library. The developer-site is on longer available. It contained LaserGun and SpaceShuttle, which I resend on April 23, 2018 to Douwe.