Labbook Dutch Nao Team
Error Reports
The head of Princess Beep Boop (Nao4) crashed twice when an ethernet cable was plucked in, but this problem disappeared after flashing. Seems OK 13 December 2016.
- Julia has a weak right shoulder (December 2016).
Bleu hips are squicking. Seems OK September 2015.
- Bleu sound falls away. Loose connector? September 2015.
- Nao's overheats faster when using arms than using legs.
Blue skulls is broken at the bottom: should remove its head any more.
Blue has a connector at the front which is no longer glued on position. Couldn't find a connector position.
Rouge has a broken finger at its left hand.
Started Labbook 2023.
Labbook Dutch Nao Team
December 7, 2022
- Found Summerschool site back. Unfortunatelly, without pdfs and zips.
- dag1_start.zip can be found in bbr/2018. The other days not.
- Found the code at github, including the tex-files of day 1-3.
December 2, 2022
- OpenRobotics has many packages which could be installed on a Nao robot.
- The install instructions can be found here (for v1.14)
- Note that also a version is available for Naoqi v2.1.0.19. Moos has v2.8.5.11. Tom and Jerry have v2.1.4.13
- For the nao robot the packages nao-robot-0.2.2r1 and naoqi02.1.0.19 look promissing
- Also the py27-ros* pkg seem nice.
- Even better, I see python3 packages.
- Started with wget http://robotpkg.openrobots.org/packages/bsd/OpenNao-2.1.0.19-i386/bootstrap.tar.gz
- First had to do date -s "2 DEC 2022 15:29:00" before I could do tar -xf /tmp/bootstrap.tar.gz on Tom.
- The command robotpkg_add http://robotpkg.openrobots.org/packages/bsd/OpenNao-2.1.0.19-i386/pub/pkgin-0.6.4r2.tgz works, although with the warning:
robotpkg_add: Warning: package `pkgin-0.6.4r2' was built for a platform:
robotpkg_add: OpenNao/i386 2.1.0.19 (pkg) vs. OpenNao/i386 2.1.4.13 (this host)
- The next command robotpkgin update fails, because /opt/openrobots/etc/robotpkgin/repositories.conf contains http://robotpkg.openrobots.org/packages/bsd/$osname-$osrelease-$arch/pub. Replacing this with OpenNao-2.1.0.19-i386 solves this issue. command robotpkgin update works.
- Back to nao as user. Explictly source ~/.bashrc to get /opt/openrobotics/bin into the PATH. Next is robotpkgin avail | grep python3, which indicates that python33-3.3.5r4 can be installed.
- Yet the command fails with /opt/openrobots/var/db/pkgin/cache does not have enough space for download, (23M required but only 16M are available)
- The root partition was 99% full, so I moved /opt/openrobots to /var/persistent/opt/openrobots/.
- That seems to help, although robotpkgin now complains that pkg_install package is not installed
- pgkin seems to be based on github project
- Seems the emerge as package installer is only available in the virtual machine.
- On this page still emerge was mentioned (for OpenNao 2.1.2)
November 28, 2022
- They tried to connect a Nao v5 robot (NaoQi 2.1.4.13) with Choregraphe 2.5.10.7. The program stopped when they send a Say command to the robot.
- Installed Choregraphe 2.5.10.7 on WS10 and it worked.
- Connected both WS10 and Tom via LAB42 wireless network.
- Connected also Jerry to the LAB42 network (after setting my IPv4 manually to the corresponding domain, because nb-dual only got a IPv6 address when connecting via Ethernet to the SPL router). Could ssh via jerry.local, but had to fix the IPv4 before I could use the webinterface.
November 22, 2022
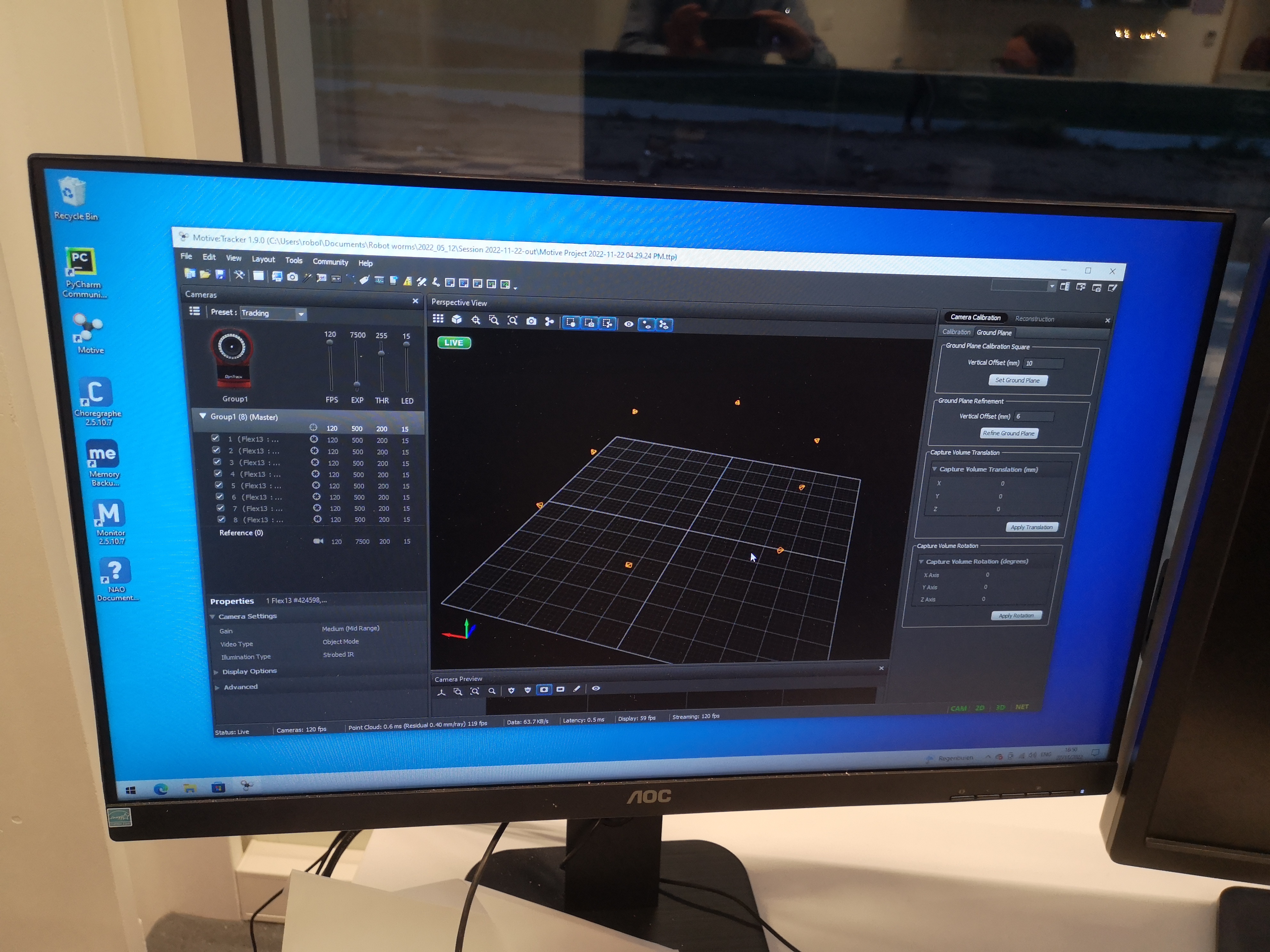
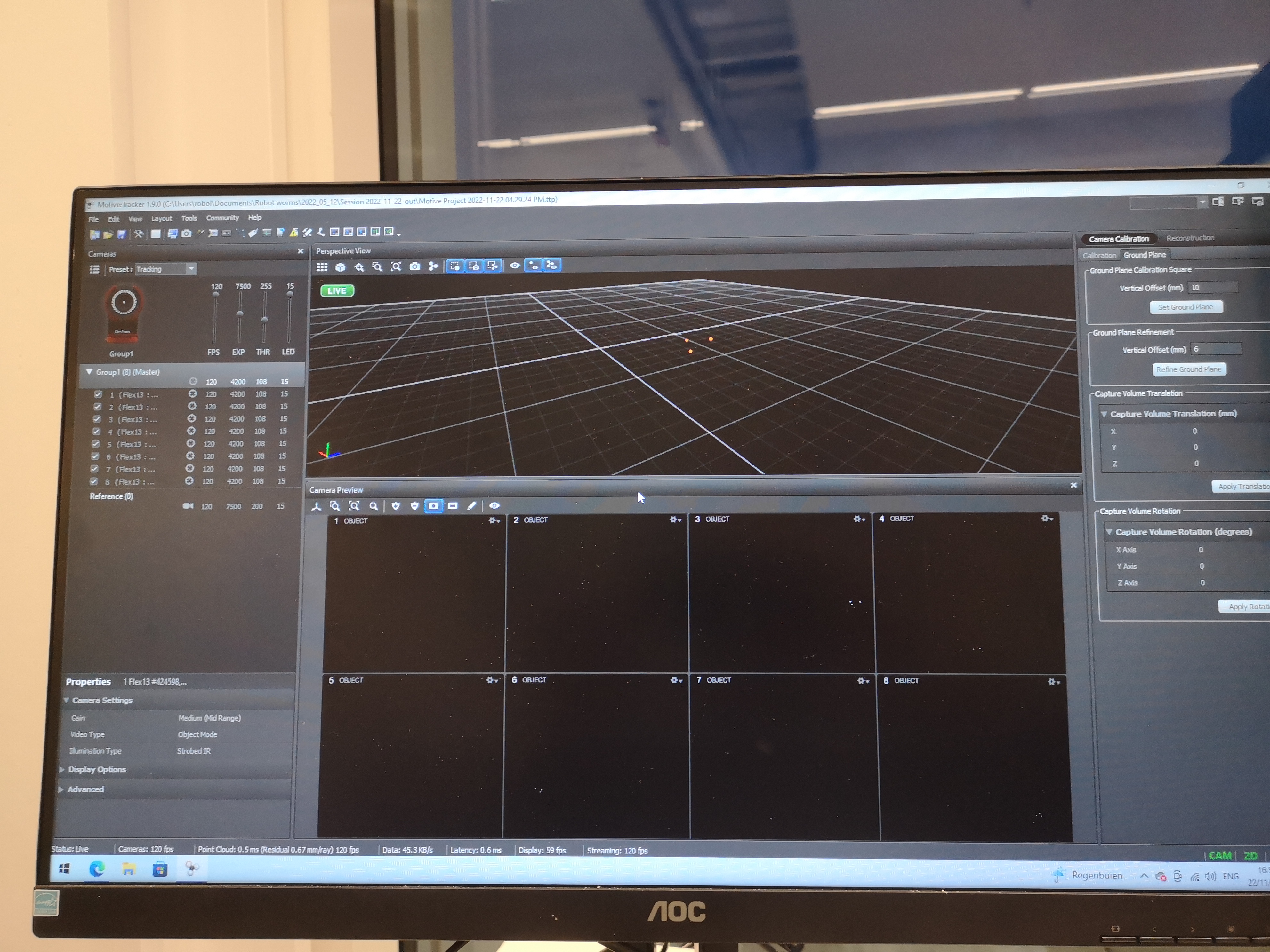
- The current placement of the cameras is close to optimal configuration. Along the axis they are placed 7m apart, although I could rotate them 45deg towards the center. The cameras along the short axis should be somewere in between (now at 6m, otherwise at 9m).
- Also Camera settings are explained.
- With rotating the corner camera 45deg we could come to a good calibration, although the area was quite small.
- Used the 2x5m USB-extension to use the 3rd USB-hub to mount the cameras above the goals.
- Wanding goes slow with this setup. It is now later, so the LED-lights in the ceiling are now more bright.
- The previous superflues tracking-masks can be removed with the small buttons above the camera views.
- After some camera-angle adjustment we found a configuration that gave an Very High quality of wanding and an Exceptional good calibration. Only the setting of the ground plane. Didn't work. We had to block the reflections in the window to see the triangle. That was not only blocking, but also optimizing the camera parameters. For this setting (dark outside, blanks up, lights on, the setting EXP 4200 and THR 108 worked fine. A latter working adjustment was EXP 5895 and THR 119.

- Will we see how stable this settings for different circumstances are.
November 17, 2022
- Setting up the Optitrack. With three cameras on the side the field is already quite well covered, so could use the two extra cameras to aim along the center line to the goals.
- The fifth camera was not detected. WS10 gave a signal that a device was added, but after circling the camera didn't get a number. There were already some sync errors after the first four cameras. Tried several configuration (swapping cables, cameras and hubs, but problem prevailed.
- Restarting Motive solved the issue.
- Another USB2-0 extension is needed if we want to use the third hub (now one cable goes diagonal).
November 3, 2022
- Looked at NeRFactor paper.
- They point in related-work to single-shot approaches to estimate the light:
October 26, 2022
- Connected all Optitrack on the ground, Motive could see all 8.
- Need smaller bolds to connect them to the ceeling, so have to wait to tomorrow to mount them to the railing.
- Connected WS10 to the large screen. The large screen has DVI and HDMI as input, WS10 has 1 HDMI and 3 Display outputs. The HDMI output was already used for the small screen, so first used a HDMI-Display converter, which didn't work.
- Also Display-DVI failed, also with my nb-dual.
- Solved it with a rather short HDMI-Display cable. Note that the boot is on the large screen, and the Windows update on the small screen. The WS10 updated its version, it is now 21H1. Disconnected during setup from the internet to be not locked in.
- WS10 likes to update to Windows11. Postponed that option. Put WS10 back to sleep.
-
September 26, 2022
- Created an account at United Robotics support and resend the ticket about the head.
-
- Doing a factory reset with the NaoQi 2.8.7.4 image I received from United Robotics.
- Still, the WebInterface doesn't want to continue after the wifi is configured.
- Tried to configure the robot with Robot Settings, but the robot can no longer connect to the softbank server (error message no internet). Retried while connected via vislab server, same error. Switched back to LAB42.
- Executed the script to bypass the wizard.
- Updated the script to give Moos back its name. Could do ping moos.local after a reboot.
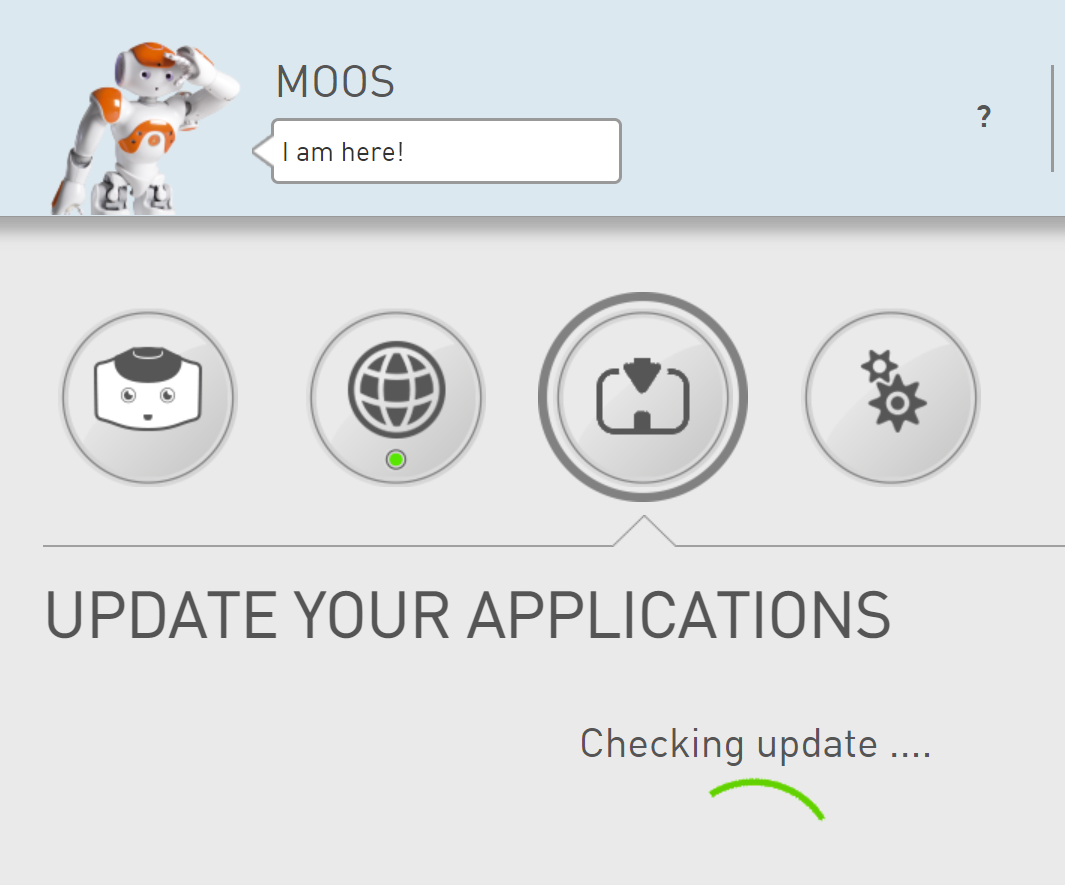
- After the reboot I could update the applications. After 2 updates the PluralIO tab appeared (#/menu/ht-plural-nao), where I could assign Moos to my Plural.io cloud. The robot is licenced until 10.10.2022.
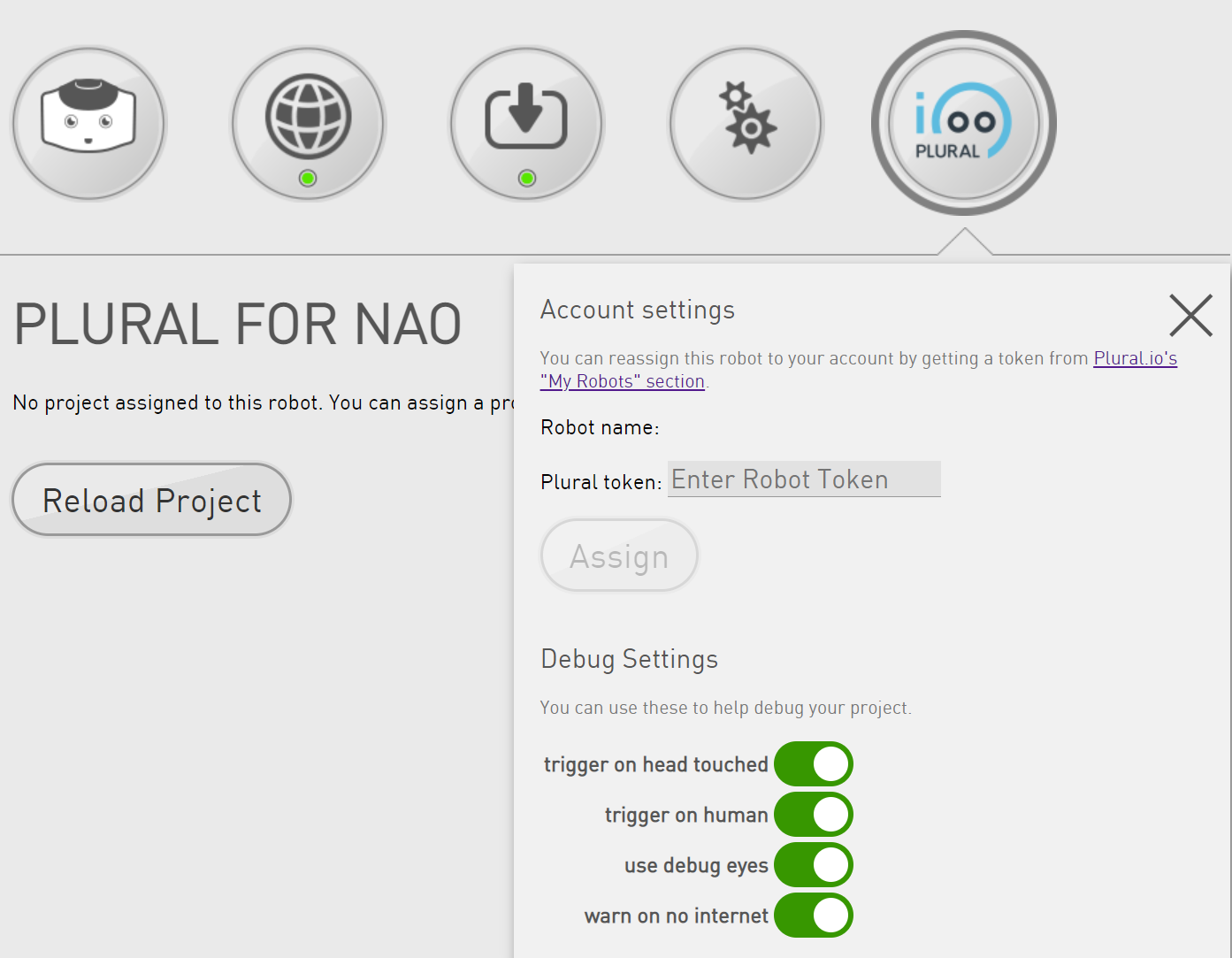
- At the Plural.io cloud I could assign two projects to my robot. I choose the Nao reception showcase.
- When I go to the Reception project, I have the option to publish it to Moos, only the option is grey (offline).
- Activated vislab again (forgot LAB42). Couldn't connect to the softbank store and still offline according to Plural.io. Tried a reboot.
- After the reboot I saw the Reception project on Plural.io tab, which I could play. The robot said hello, but didn't move:
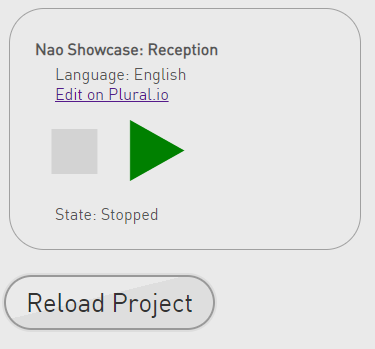
- After a wakeup via Choregraphe the robot also waved. Responded on the 'Hello human' with a 'How are you?'. Failed to say Fine or Sad. After a (long) wait, the robot responded again with the other options ('Hello', 'What are you?', 'What can you do?', 'Goodbye') with all the correct responses.
September 21, 2022
- Replaced the Dutch Nao Team v6 battery (now marked with '?') in Blue for the one used in Ferb.
- Now Blue boots and directly starts in a lively NaoLife mode.
- After a while Blue falls, so it is better to be alive while sitting.
- Could put its motors on again with the Choregraphe from XPS-17.
- Reduced the volume in the webinterface and connected the robot to LAB42.
- Note that Blue is running NaoQi 1.14.1.
-
- Installing Choregraphe 1.14.5 on nb-dual.
- Could control both Rouge and Blue without problems with Choregraph 1.14.5.
- Note that Rouge wants to stand up first.
September 15, 2022
- Looking at the wifi-configuration of Rouge. Rouge is connected to LAB42.
- On Rouge I only see /etc/wpa_supplicant/wpa_client.sh, not the wpa_supplicant.conf.
- Looked at Northern Bites wiki.
- Didn't know that you could execute say "hello world" from the commandline.
- Should look into what Northen Bites copy-files.sh and setup-robot.sh does.
- The file setup-wifi.sh also copies wap_supplicant.conf to /etc/wpa_supplicant.
- Looked at January 14, 2013. The webinterface worked at the end, after looking at /var/www/naoweb/services/network.py, which starts up ALConnectionManager.
- Blue still not boots, should replace the battery.
September 13, 2022
- Found a charger which was labeled Hokuyo, which fitted the RS232 connection on the Hokuyo of URG04LX.
- One connection was broken, so Joel repaired it.
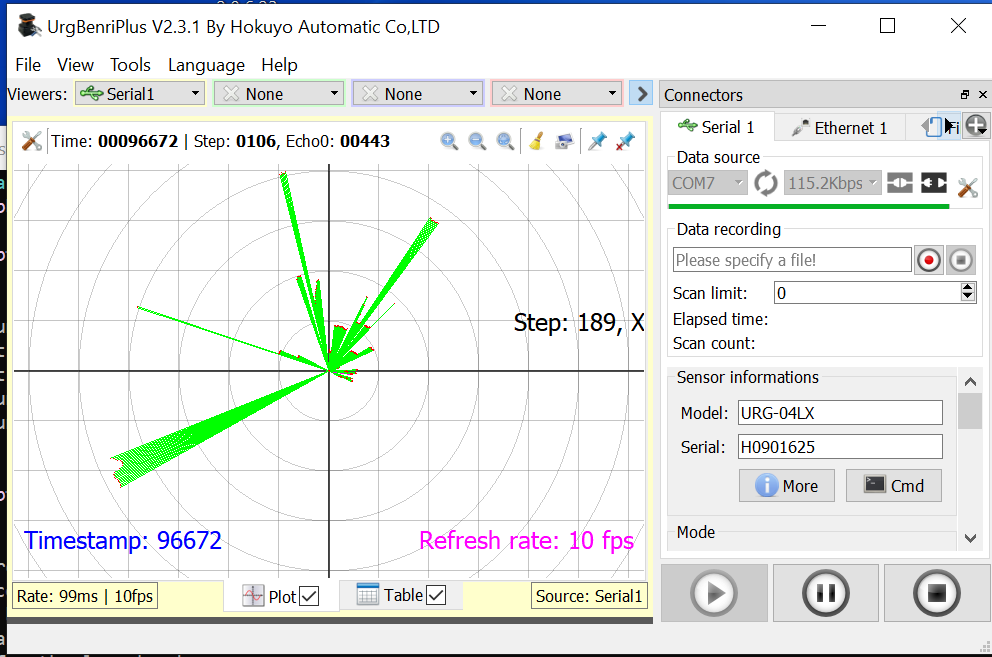
- Yet, the URG04LX is not visible in the UrgBenriPlus tool, nor does the led on top light up.
- Windows reports that COM7 connection is made, which becomes visible in the tool. Don't forget to hit the connect burron next to it.
- Checked the 5V on the broken connection, now the led lights up and both URG04LX are visible in the UrgBenriPlus tool:
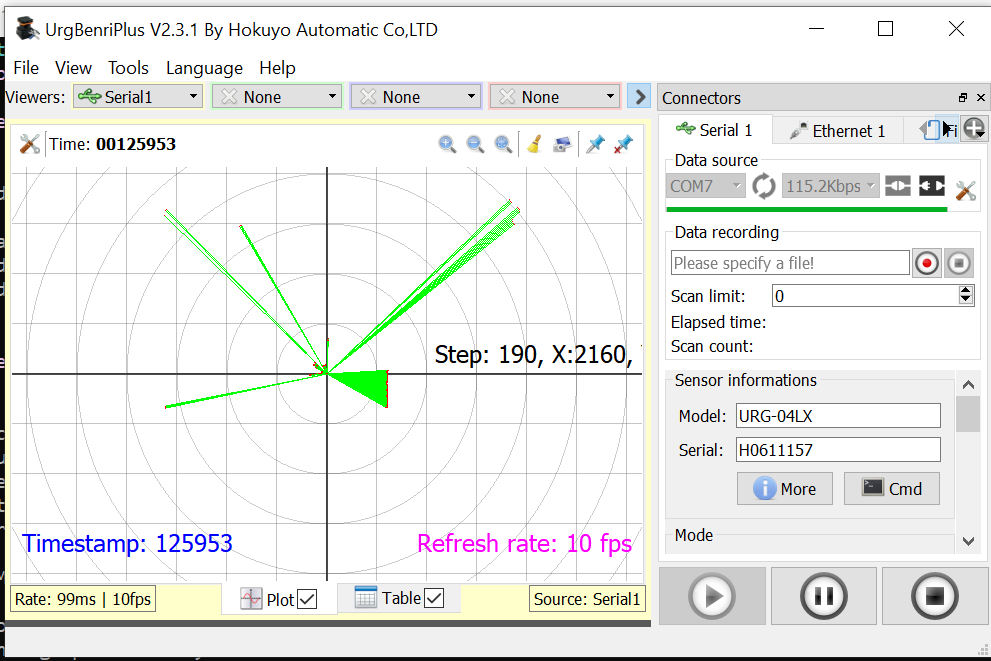
- Also tried the cmd window, which allows to give SCIP commands (no help).
- More interesting is the More window, which shows that the firmware is 3.3.00 (16 April 2008).
-
- Put a V6 battery in Blue, but booting still fails on low battery, so I will give him some time.
- Found both Choregraphe v1.14.5 on my home-backup and some wpa_supplicant.conf for SPL.
- Found tutorial for ros-indigo.
- I was able to get both the URG04LX and UTM30LX working with ros-melodic.
- A publications from 2011 on obstacle avoidance with the laserhead.
- Another paper is a Nao looking in the mirror.
- Here a paper out of 2014.
- The laserhead documentation is online (less detailed than the printed documentation.
- The ALLaser documentation still exists for NaoQi 2.5 and even NaoQi 2,8 monitor.
- Note that when both USB and RS-232 are connected, only USB can be used
- Seems to be at both sides a 2.5mm JST-XH connector, only 8 pins at the URG-side (with two unused) and 6 pins at the Nao side.
- Could try to make it with JST-XH Connector kit.
September 12, 2022
- I received the opn of Naoqi 2.8.7.4, with the warning that with this version I don't have root access anymore.
- I couldn't find this feature in the release notes, although could be meant with NAOqi OS - user account.
- Started up XPS17. This laptop has still Choregraphe 1.10.44 installed (older than the v1.14.5 of Rouge). Could be usefull for the laserhead.
- Note that on my Wintel Install, I have v1.6.13 and v1.10.3. The most modern v1.* there is v1.12.5 (not v.1.14.*).
- Via Manage Behaviors I could select naos-life as default-behavior. I launched naos-life, which gave a warning that I naolife was started, but that naoqi should be restarted. Choregraphe itself stopped working, but Rouge was alive.
- Rebooted Rouge, to see if it comes to life automatically. It does, after 5 minutes. Yet, it is not very responsive.
- In Choregraphe 1.10.44, motors red means that stiffness is ON. Green means stiffness OFF. The robot doesn't go to a a safe position first once the stiffness is turned off (so falls when standing straight).
- Note that Rouge also has an extensive library of old demonstrations, including starwars and thriller.
- The directory C:\Programs\Aldebaran\older-versions contains also v1.3.13, v1.6.13, v1.8.16.
- I worked with the LaserHead on January 5, 2010. I used Telepath v1.3.8 to inspect the laservalues.
- On November 19, 2009 I mentioned that the LaserHead needs 5 Volts on its RS 232 connector.
- No older entry than October 6, 2009. At that day I installed v1.3.13.
- On August 16, 2011 I powered the laserhead externally, to boost the sensorrange from 0.7m to 4.0m.
- On January 24, 2011 I used Telepath 1.10.10 to monitor the laser measurements (althought the head seems to run 1.3.8L).
- In 2012 I am using NaoQi 1.12 and the LaserHead is no longer mentioned.
-
- Trying to boot Rouge with the LaserHead (without Hokoyu for the moment). The system boots, but because the LaserHead has no touch on the head, I had to get a feet-bumber from the storage.
- When connecting (wired) the LaserHead with Choregraphe, AlMemory reports v1.14 (with Choregraphe still v1.10).
- Could do ssh nao@nao.local from the Windows command-prompt.
- There is no /etc/wpa_supplicant.conf. Seems that v1.14 is also not running a webbrowser to do the configuration.
- On November 18, 2009 I stored wpa_supplicant on u013153.
- The only file on the LaserHead is /etc/wpa_supplicant/wpa_cli.sh. /etc/hostname exists and is set to nao. The file /etc/networks exists (defining the loopback and link-local).
- Looked for the drivers of Hokuyu URG-04LX.
- Registered as user and downloaded the Windows-driver from 2009/10/26.
- My labbook mentioned Linux-drivers on this page, but I only saw sample code. The Linux targed developement link on link is broken.
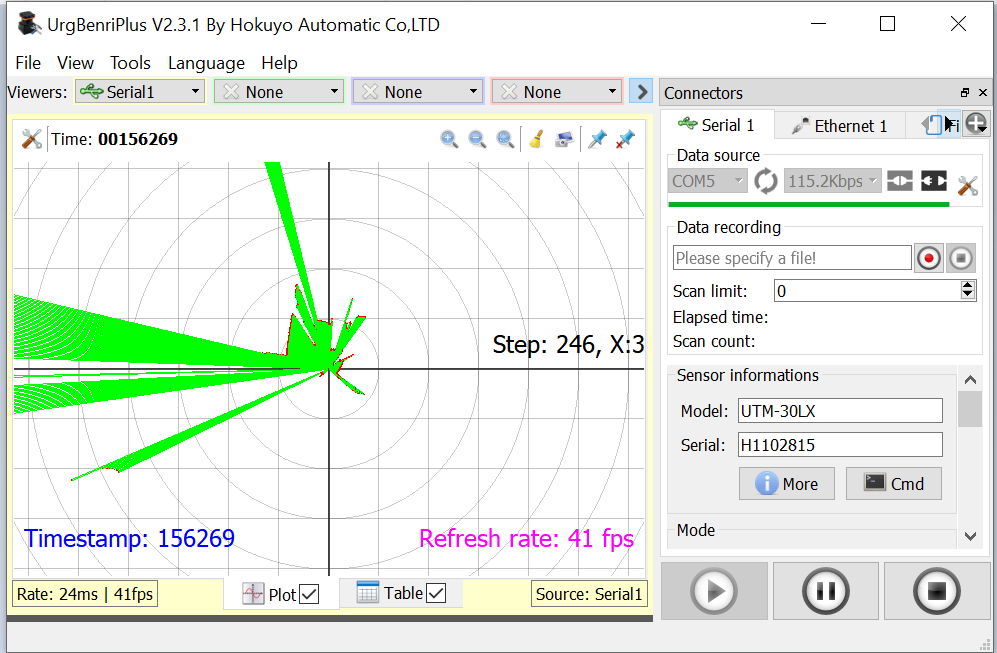
- Looked at the most modern download (2022): UrgBenriPlus_2.3.1, which is a Windows program (and installs fine on Windows10). Should first try it with a UTM30LX, and then with an URG04LX.
- THe UTM30LX works with a serial connection on COM5:
- On sourgeforge there is also a Linux version, although a much older version (v1.7.6).
- Should also check urg_node (ros-drivers) and hokuyo_node (ros-drivers).
September 9, 2022
- Humanoid Robotics suggested to check the system date of Moos, but unfortunately I did it on nb-ros, instead of Moos.
- Try again later. I requested a system image of NaoQi 2.8.7
- Tom is still connected to robolab and running NaoQi 2.1.4.13. Switched NaoLife on in the webinterface.
- Same for Jenny, although the battery maybe bad (was only charged to 14%).
- Gave Rouge the 2016 battery. Looking for additional chargers.
- Found the battle box.
- The 2016 battery didn't gave a boot, replaced it with a V6 battery.
- Rouge starts, but doesn't have automatic life.
- Connected Rouge to LAB42, but vislab_wifi is not visible.
- No option to set up NaoLife in webinterface, Choregraphe 2.8.7 doesn't want to connect to v1.14.5
September 5, 2022
- Looked if I could find a script that I have made to finish the Wizard. Scanned my labbooks, but only found October 9, 2018 where I bypassed the webinterface with a system_proxy command to set the name.
- Found the script at Behavior-Based Robotics (January 24, 2022). Will try this script to finish the wizard.
- The script works, I was able to reach the WebInterface beyond the Wizard. The page #/menu/apps is now checking for updates (which takes long):
- Checked in /opt/aldebaran/www/apps/cloud/bin/cert cloud_user certificate, which was last stored in Jul 12, during RoboCup.
September 4, 2022
- Also at home both the Wizard of the webinterface as the RobotController gails to connect to the services.
September 2, 2022
- Received a response from Humanizing Technologies. I already gave them rights at Aldebaran Cloud. They also requested that Moos was running v2.8.7, but according to the manage window of Moos (in the cloud) I have already requested an update to Release 2.8.7.4.
- The webinterface still not works (hanging on wizard/next). The advanced/# window showed that I still have v 2.8.5.11 running.
- Read the manual page but naoqi --version seems now to be nao --version
systemctl --user --version naoqi
systemd 229
+PAM -AUDIT -SELINUX +IMA -APPARMOR +SMACK +SYSVINIT +UTMP -LIBCRYPTSETUP -GCRYPT +GNUTLS +ACL +XZ -LZ4 -SECCOMP +BLKID -ELFUTILS +KMOD -IDN
- Trying to do an update via Choregraphe, but that requires a downloaded image. Tried to finish the registration with RobotController, but logging in with a a working aldebaran account give a Unable to get User Oauth Token. Will take Moos with me to try it at home.
September 1, 2022
- Forgot that I had not registered the MAC-adres of Moos yet. So, also commented out the avahi-daemon service.
- After a reboot I could not connect to moos.local anymore. After a second reboot Moos said its wired ip, so I could ractivate the avahi-daemon again, register the MAC and connect to both robolab and the new LAB42 network.
August 31, 2022
- The next step on the web-interface is a connection to the server, which fails. Not clear if this is due to the firewall of the robolab-domain, or (more probable) that this server is no longer available (because there is now the RobotSettings app).
- The /home/nao/DNT/bin/boot_fixes.sh contains two wireless related commands: systemctl restart avahi-daemon.service and /home/nao/DNT/network/wireless.
- The last command restarts wpa_supplicant with the configuration /home/nao/DNT/network/profiles/default.
- Made the script readable again (not executable yet) and commented both commands out (leaving /home/nao/DNT/bin/fixSwappedCamera.py).
- With those two commands commented out, the wireless connection is still build up. Made script also executable. Still works. Uncommented the avahi restart. Still works.
- Uncommented a connection is build up, but the ip-address is actually in the subdomain 10.0.8, and not in the university domain. Could possibly repaired with a robolab profile. For the moment commented the last command out.
August 30, 2022
- First trying if Tom (v5) could scan and connect. Yet, also here the boot fails (depleted battery? - was marked as 'April 2018'. Should maybe charged with a V6 charger).
- Booted Tom with a 'Not bad' battery.
- Was able to connect Tom to robolab.
- With the other 'Not bad' battery also Jerry booted. I was not able to connect to the SSID robolab when the MAC address was not registered yet, but once that was done the connection directly worked.
-
- There is a script /home/nao/DNT/bin/boot_fixes.sh. Did not see where this script is called, but made it unreadable and unexecutable as root. Rebooted.
- Now the connection is made. Continued with RobotSettings, but the login to Aldebaran cloud failed (even after resetting it - with at least 8 characters passphrase and a lower case email). Ignoring the synchronisation, I can only continue the setup by resetting the password of the Nao with a non-default one. Skipped further use of RobotSettings.
August 29, 2022
- Trying to connect Ferb to the robolab SSID, but strange enough scanning for networks failed.
- Could connect to ferb.local/advanced/#/, but that has every setting, except the wifi.
- Trying to see if I can activate the wifi from the commandline.
- The tricks from this post fail, because the necessary tools are not installed.
- Strange enough ifconfig indicates the wlan is connected via inet6, but not clear to which network:
wlan0 Link encap:Ethernet HWaddr 28:24:FF:4D:30:61
inet addr:10.0.8.23 Bcast:10.0.255.255 Mask:255.255.0.0
- Used the wpa_supplicant trick of this post to start the connection. The wlan0 was succesfully associated with SSID robolab.
- Further checking with iwconfig and dhclient didn't work, because those tools are not installed.
- Yet, still the reload of the network list in the wizard fails. Also ifconfig shows still a 10.0.8.23 address for wlan0
- Trying a reboot without lan-cable. Still can't connect to the network.
- Looked at aldebaran for system updates. For Moos (v6) version 2.8.7.4, 2.8.6.23, 2.8.5.10 and 2.1.4.13 are available. Ferb is running 2.8.5.11. That is the same for Mio (v5).
- Switched to Moos, but the Wifi refresh gives the same error.
- Checked the v2.8.7.4 release notes. New in v2.8 is the Robot Settings app. This app could also not refresh the wifi list. Trying to do an upgrade from 2.8.5.11 to 2.8.7.4.
- At Aldebaran cloud I see in the history 08-29 11:38 : System Update of Robot moos has been set to Release 2.8.7.4, but nothing happens. Maybe a reboot is required.
- The update documentation still indicates an update via Choregraph, but that requires first a download of a system image, which is no longer available for download at developer center.
- Also checked old version page, but no system images can be found anymore on this page.
- Looked if Linux babe had some good tips. The only new command was ip addr show wlan0, which still gives inet 10.0.8.21/16. The command systemctl stop NetworkManager gave Failed to stop NetworkManager.service: Unit NetworkManager.service not loaded..
- The tool emerge is no longer the way to install linux-tools on NaoQi. NaoQi is now based on Yocto. Yet, I also cannot run the bitbake command.
- Read brief introduction to Yocto.
August 25, 2022
- Started up Jerry, but Naoqi shutdown directly after booting.
- Started up Ferb, which is in DNT mode.
- Made connection via ferb.local and disabled the DNT mode.
- Checked the hardware address with ifconfig -a.
August 23, 2022
- Registered for a webinar at humanizing.com tomorrow. No physical robot is needed.
- Searched the storage for one of the Nieuw Utrechts Toneel / ALASCA robots (which were functional v5 robots according to Nao administration, because plural.io is an App that has to be installed at the robot.
- Still have to find a charger and a wireless router for tomorrow.
- For the avatar I need a tablet, so I should bring one tomorrow.
- The Plural documentation can be found here.
- The documentation also contains a list of animations for Pepper and Nao.
- Will also need a Nao v6, because the robot's licence should not be expired.
July 17, 2022
- If we publish Daniël's work, we should refer to the RoboCup 2022 papers 'Instance-Based Opponent Action Prediction in Soccer Simulation Using Boundary Graphs' (paper 5) and 'Cyrus2D base: Source Code Base for RoboCup 2D Soccer Simulation League' (paper 13)
July 7, 2022
- Daniël van Dijk finished his Bsc-thesis.
- Looking in RoboCup database, I found 39 publications on Soccer Simulation.
- Looking for a thesis on this subject, I found those three:
- I couldn't find any later thesis (also not with snowballing). Note that the latter one is also very applicable to port Daniël's work to SPL.
April 21, 2022
April 20, 2022
- The visualisation lab will use an ethernet version of Optitrack. Unfortunatly, according to FAQ (Q5), the USB and Ethernet system cannot mix.
- It is even worse (Q6):
All OptiTrack Ethernet cameras can be used together in the same system. All USB cameras can be used in the same system except for the Flex 13, which uses a different timing mechanism
.
January 11, 2022
- Found a way to update the robot. The store doesn't exist anymore, but a system update can be scheduled from cloud.aldebaran-robotics.com/application/.
- Currently, v2.8.7.4, v2.8.6.23, v2.8.5.10, v2.1.4.13 are available:
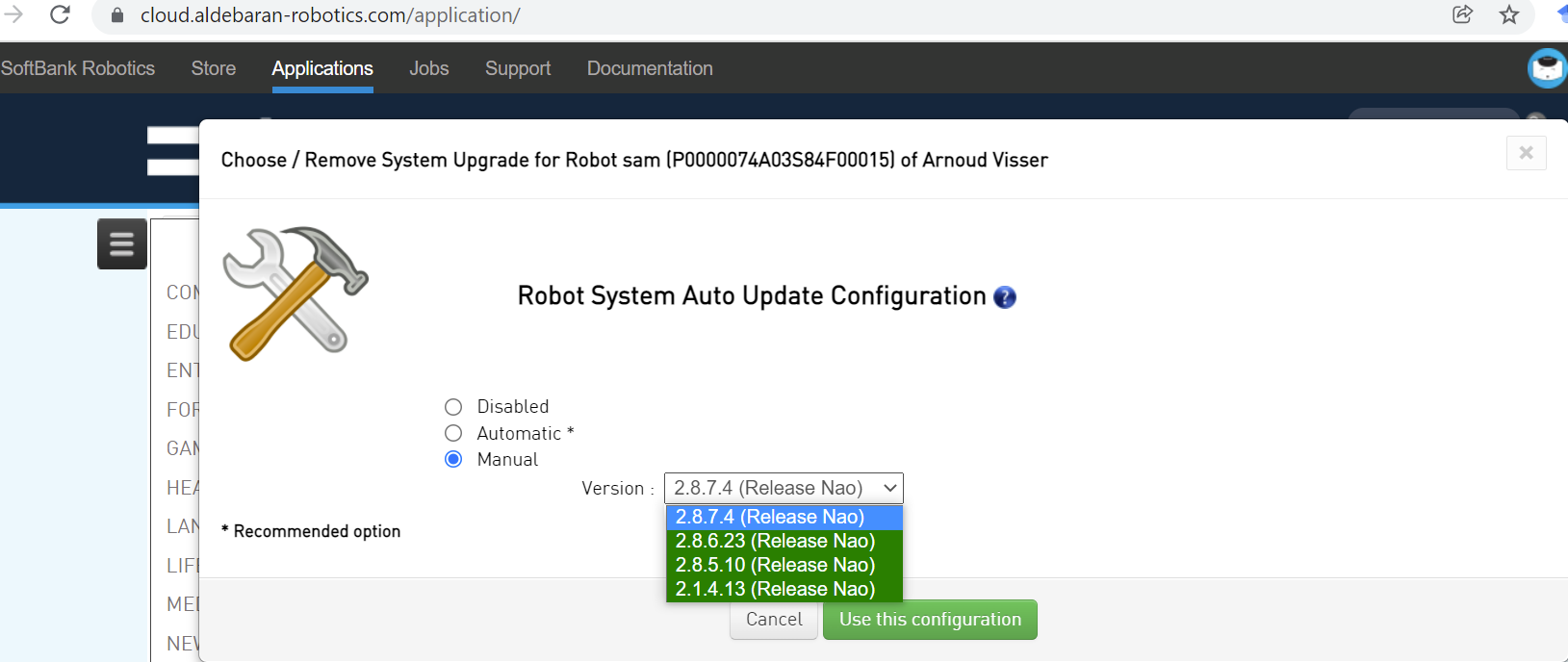
- If Sam is no not used during Behavior-Based Robotics, I could try if the image is downloaded, so that I can save-guarded it. I could also try it for Brooke or Mio, because that are v5 robots. Yet, those robots are currently still in use at the ALASCA college.
Previous Labbook