Started
Labbook July-December 2007.
20 June 2007
Trying to find a reasonable position of the SICK-laser scanner on the Talon. On the front corner there is not enough place for the SICK, although a Hokuyo could fit. Position=(X=0.38,Y=0.0,Z=-0.1) was nearly good, but the arm still hit the scanner. (X=0.42,Y=0.0,Z=+0.1) is good for the x, the z is too low (SICK is in the ground). Tried Z=+0.05
20 June 2007
- Upgraded pc-vlab10 to UsarSim v3.13. ComRadar and ComDisc are no longer used, and the ComStation doesn't jump anymore. This bug is fixed.
- Tested the code from Luis. This code only makes the connection to port 5874, another program has to spawn a robot with the same name over port 3000. When I configured both mains correctly, I could sent messages from one agent on nb-avmovie to another agent on nb-avmovie, via the WSSserver on pc-vlab10.
13 June 2007
- Reproduced my experiment of 10 May with the C-programs clisten_tiny.c and cspeak_tiny.c. When I connect to pc-unreal (146.50.1.149 5874) the message is sent and received.
- When I repeat the experiment with the server on pc-vlab10 (146.50.0.26 5874) the communication seems to stall. Is this the same problem as the problem of Luis?
- Downloaded version 3.12 to pc-vlab10. Version was already installed. Installed Notepad++.
- Compiled clisten_tiny.c and cspeak_tiny.c at pc-vlab. Had to add definition of sockaddr_storage to clisten_tiny.c because this structure in the system-files on this machine. Program was still hanging on tcp_accept, but found out that this was due to a wrong registration. When I register with the correct ip-adress the test-program works fine.Luis works with the loop-back 127.0.0.0, which is not allowed, so his problem should also be solved. Luis has seen his first message 'HOW ARE YOU'.
7 June 2007
- Received an example ERS-driver from Marco Zaratti. The MultiDrive command is build with CControlDlg::withAddToDriveAibo and sent with CControlDlg::ExecuteDriveAibo(). Aksel didn't see anything moving, because for MultiDrive the joint-angle have to be converted to Unreal Units (UU). The range for the Head-joints seems to be [-14563,546],[-16930, 16930],[-3640,9102] (Aksel tried something like (0.5,0.5,0.5)). In CSimpleWalk::ExecuteState the conversion from regular angles to UU takes place. Simple tries to move the legs around in 4 states (representing a rectangle).
- Studied the Math.NET project documentation.
- Studied the possibilities to call C++ dll inside Visual Basic. The following page leads the subject Consuming DLL functions of the Micrsoft Delevoper Network.
- link /dump /exports cvEMShift.dll shows that this library contains 14 functions, including the important cvEMShift.
- Created EmShiftDetector.vb in ImageAnalysis\Analysis. Tried to do step 1 of EmShift: CreateMyHistogram in the same way as SkinDetector.vb calls New ColorHistogram. Had to define a structure in Basic that represents the data-structure in C++, but this structure seems far to complicated (including array and pointers to data of unknown size).
31 May 2007
- Updated UsarSim to version 3.12 at pc-unreal.
- Build USAR_UI. The provided workspace seems to be empty, the provided project file refers to a none-existing makefile. Created new workspace in VC6, added files and resources to the project, added in Link->input winmm.lib, changed in C++->CodeGeneration from SingleThreaded to MultiThreaded. Could spawn robots, received the sensor-messages, but no image. Couldn't control robot (too busy).
- For images, I should build SimpleUI.
24 May 2007
- Downloaded Global Mapper, and tested the overlays for the DM-Mapping world. Overlaying with the aproiri.tif worked fine.
- Overlaying with the measurements from 9 May was also possible. You are prompted to define at least two corresponding points in the new overlay compared with the reference (in this case yellow.tif which contains the truth). I selected three points, as can be seen from the following screenshot:
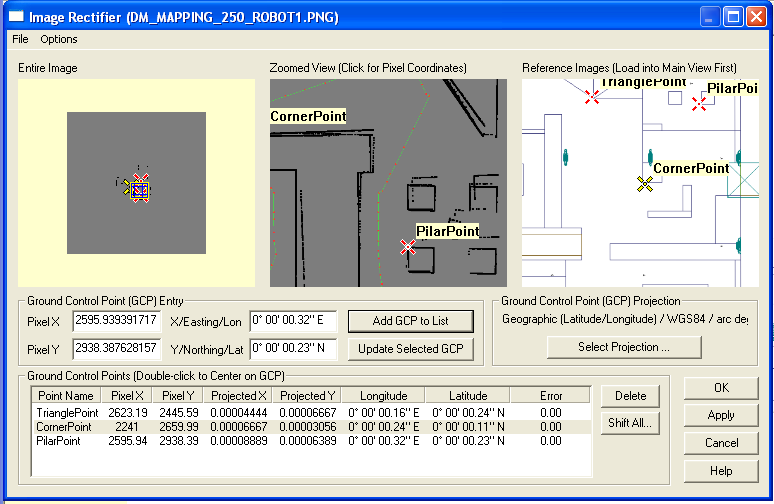
- The result is quite good, although everything is slightly shifted. I probably could have selected a better reference point than the PilarPoint: a point which was encountered early in the tour so that the accumaleted error is minimal:
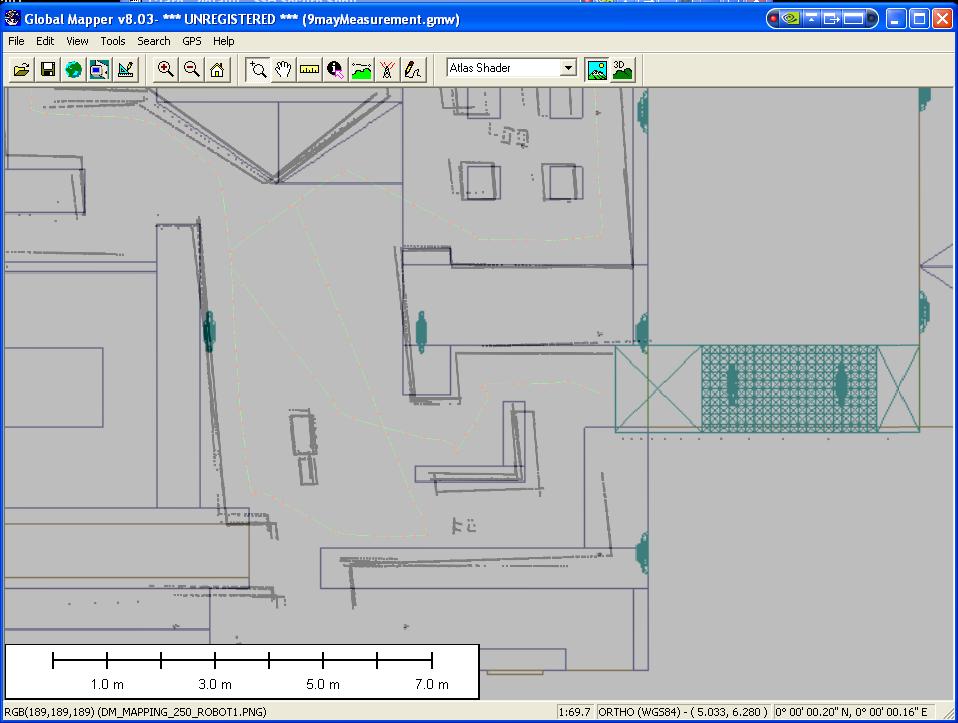
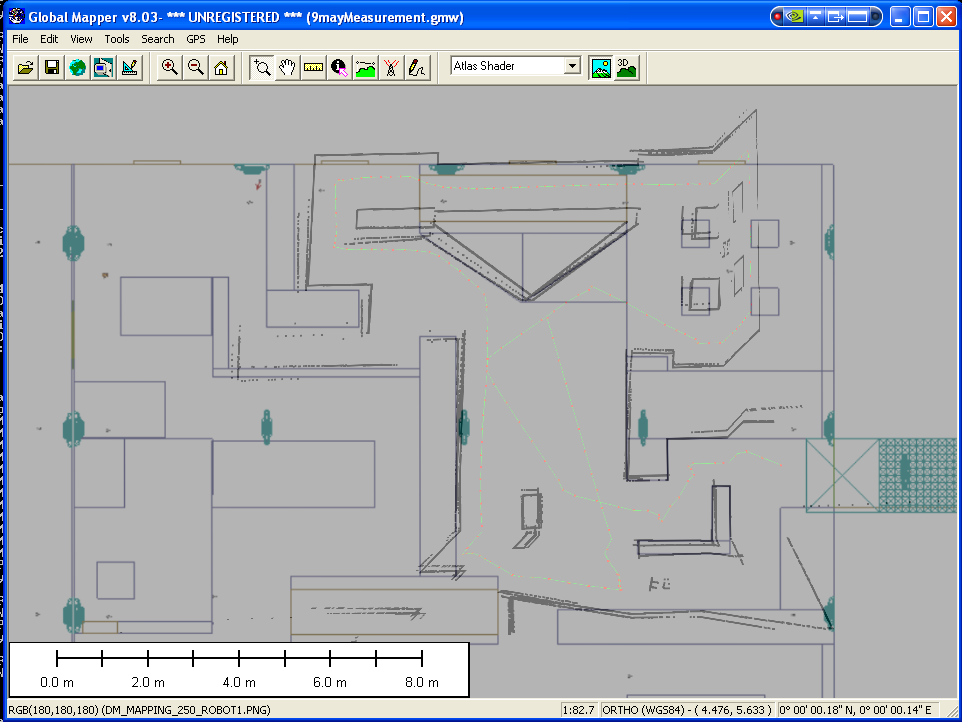
- Tried to the referencing again. With only two points you get a wrong orientation. Tried it with seven points, all in the corners of the first S-shaped curve. The result is quite good, except at the right, just behind the first reference point;
22 May 2007
- Added a list of head observations to a patch. Tried to render those points, but I cannot control in which layer I am. Found nice colors for victims at msdn. Unfortunatelly, those colors are also used for the obstacles. Should add additional graphical objects to the observations-layer to render victim-observations.
- Notice that the localization of Jimmy is lost in DM-VictTest, although Jimmy is not moving.
21 May 2007
- Tried to connect with UvArescue to USARsim 3.11. Changed from LogDriver to LifeDriver. Commented out Mount VictimSensor in UsarAgent.New. Changed DefaultHost in SettingsDesigner. Agent reports error (agent already connected). Bayu corrected bug, and two agents agents are spawn in DM-VictTest-250.bat: Jimmy at 0.4, 2.1 m / 0.0 rad and Dozer at -2.0, 2.1m / -1.57 rad. Dozer has in Victim straight in front, at 2 meter distance.
- Created VictSensor.vb. Logfile from DM-VictTest world can be found at here.
18 May 2007
- Installed Qt from https://qtwin.svn.sourceforge.net/svnroot/qtwin/qt-4/trunk revision 1869 on shuttle, this time with VS8. rescuecontrol/agent works fine.
- Copied qt-src-4.1.3\bin to nb-avmovie, but still the QtGui4.dll cannot be found (although qt-src-4.1.3 is available in the path). Do not understand.
14 May 2007
- Added Visual Basic to Visual Studio 2005 at pc-unreal, to facilitate the developments of Bayu.
- Implemented VictSensor.cpp. From start-position debug\agent.exe -c robocup -x -s 2.51,5.85,-0.446 -r 0.0,0.0,2.2 directly a victim is visible.
- Committed version 472. Gives an debug-message when a Victim is encountered.
10 May 2007
- Compiled agent on faro. Creating a new Makefile from agent.pro failed, but Makefile.binutils still worked.
- From pc-unreal I cannot start agent.sh (Xwindow needed, and no Exceed present at pc-unreal), but from pc-vlab10 it works. The robot heads into another direction (Orange arena), but the good news is the fps: avg 90.
- Tested the tools/WSS/clisten and cspeak. The programs fail, because of a check in USARComServer. When USARDeathMatch.uc is modified, so that ComServer instead of UsarComServer is used, the test-programs work fine. The behavior is OK, because UsarComServer uses the registered name of the robot to find the position of the robot. When the robot is not present in the environment, this check fails. clisten and cspeak should be extended with an INIT command.
- Spawning a ComStation and a P2AT or two P2ATs. The check in USARDeathMatch seems to work, but now the bind fails (problem is that sockets cannot be reused with winsock2).
- Added P2AT spawning to clisten_tiny.c and cspeak_tiny.c, because the ComStation has some problems with its rotating radar. Connection is made, but msg is not printed at the listen-side.
- Patched the ComServer.uc, because the isReachable was too early. First problem: isReachable needs the ComConnection class itself. isReachable only works after the Connect. When not reachable, a remove the connection again.
- cspeak_tiny needed the message_size, and the cspeak needed to wait before it closes the connection. Found out that the timing of cspeak was precisely the problem of the isReachable-check. Added two sleeps after the writes and the program works also fine with the official code.
9 May 2007
- Downloaded http://surfnet.dl.sourceforge.net/sourceforge/usarsim/DM-ElementaryTestWorlds_V3.1.zip.
- Started USAR_Maps_Files\RunClientOnly\DM-Mapping_250.bat, because this is the world used by the benchmark team (see 2007 Competition FAQ). Quite challeging world. Without robots the FPS on pc-unreal is 112.
- Started USAR_Maps_Files\RunServer\DM-Mapping_250.bat. ComServer is listening to port 5874. Started debug\agent.exe -c robocup -x 127.0.0.1 -s 3.63,10.8,-0.446 (position Robot 1 of benchmark team). Assert failure after Conf {Type VictRFID}, which is logically because this is now Conf {Type VictSensor}.
- Adjusted UsarAgent::configure, and removed sonar, status, touch, victimrfid. Agent crashes after BEHAVIOR CHANGED TO: Explore. Added sonar, status and touch again, and program continues to same Assert failure (now without Conf {Type VictRFID}). Debugging shows that the failure occurs in StatusSensor::accept.
- Removed status again, and protected UsarAgent::recieve. Now the agent is spawn, but doesn't move (waits on keyboard command).
- Updated UsarAgent::notifyUpdate. Now the robot turns, but doesn't move (to narrow space, sonar initiated retreat).
- Removed the dependency on the downwards looking sonars, and the robot nicely explores the map. The cur fps is mostly around 80 fps with one robot, but the avg fps is as low as 40 fps (one robot). Started agent in direction -r 0.0,0.0,-1.2. The agent crashes during making an image of the 180 nodes manifold.
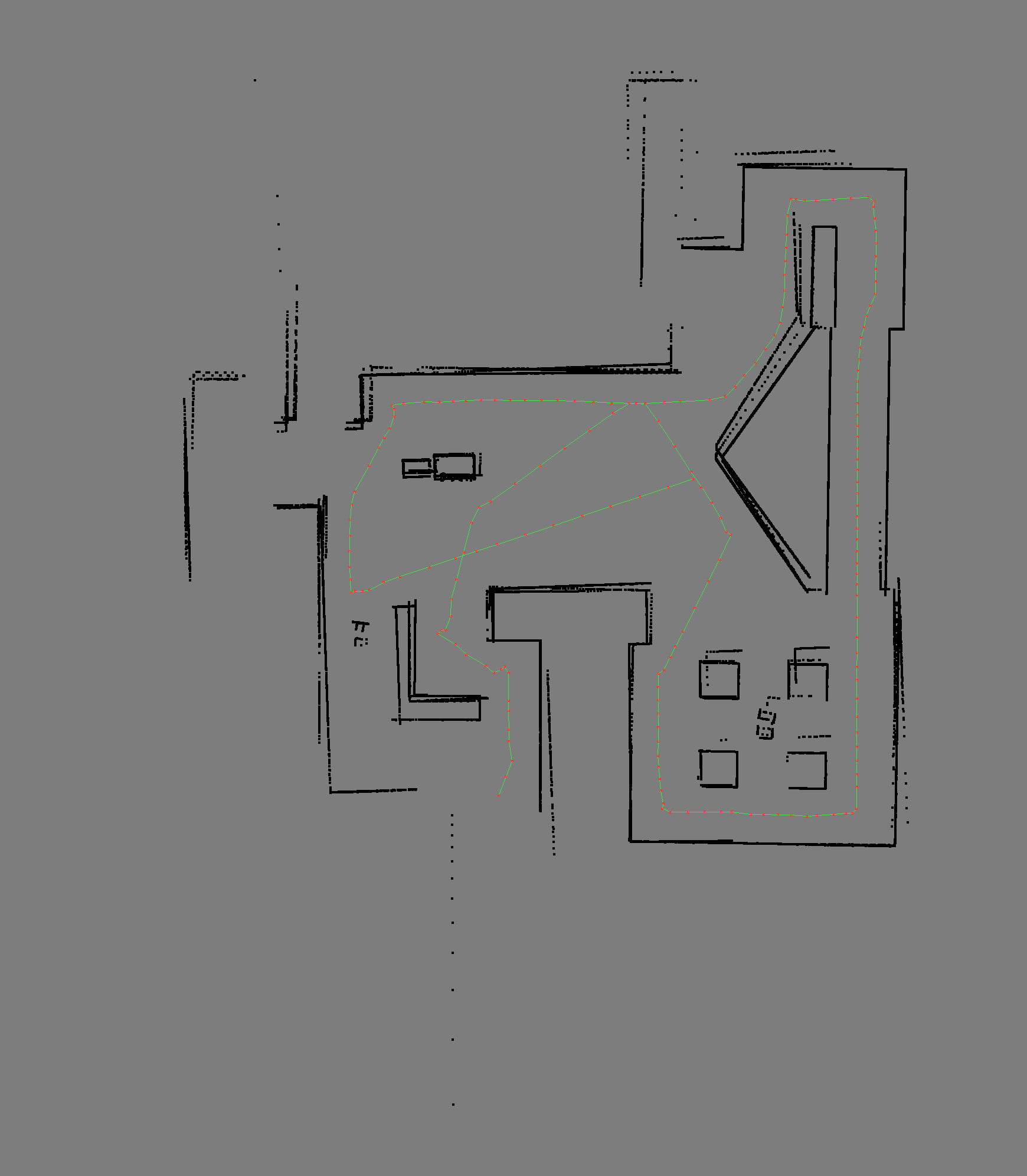
- Removed the dependency on renderGroundTruth in UsarAgent::saveMap, and a map is generated. When started in direction -r 0.0,0.0,0.0 the robot goes on the uneven corridor towards the orange arena, and falls on its back. The robot started its run on 5h35 and makes the same tour as before. After 13 minutes, the robot is heading towards an already explored area, and I stop the exploration. The result (sleek) is as follows:
8 May 2007
- Ordered UT2004 on ebay.uk.
- Created cvs_login.sh and cvs_checkout.sh commands. After cvs_checkout you have to copy the subdirectories of usarsim over the same subdirectories of UT2004.
- Still, System/make.bat doesn't work because old definitions still exist. Moved old classes to UsarBot\OldClasses. Now ComStation.uc requires ComBuilding.uc. Log entry suggests to load latest baseFiles.
- Downloaded UsarSimBaseFiles_3.11.zip. Now System/make.bat works.
28 April 2007
- Tested the echoserver with the C#-program from the Iran Open. The robots could register, but a request to listen resulted in requesting the same port multiple times (say 30 times). The request stopped, but error messages about port usage and memory usage occured.
- Unfortunatelly, the C#-program needs a newer version than VS.Net 2003. Program.cs seems to be automatically generated, with a single call to form1.cs.
- Tried to start a WindowsApplication C# project, but this directly makes a form1.cs, including resources, etc. Stopped to try.
25 April 2007
- Compiled the example code of WSS under cygwin. Needed include the winsock2 library for extensive used getaddrinfo, which seems to be a recent extention of the tcp/ip functionality. Couldn't find the library for gai_strerr yet.
- Compiled the tiny server under cygwin. Worked directly. Same error message from clisten, although port now exist (tested with firefox).
- Compiled tcp_accept under VC7. Error message is 'the application has not called WSAStartup'.
- Tried to access tiny 5874 with CSApp-function Open_clientfd("127.0.0.1","5874"), but connection refused.
- Accessing with Open_clientfd("127.0.0.1",5874) works.
- Rewritten echoserveri.c, which now plays the WSS protocol for listen.
- Written stub for getaddrinfo, clisten_tiny works now also for cygwin without winsock2 library.
- The original clisten still complains, probably error 10093 is 'the application has not called WSAStartup'.
19 April 2007
- Luis had problems with the C#-testprogram from the Iran Open rule page.
- Downloaded C-testprogram from sourceforge. Program didn't compile under Visual Studio or cygwin, so I moved it to the Linux-station faro.
- C-testprogram had also problems with connecting (non-registered robot).
- Upgraded UsarSim on pc-unreal to version 3.1. Had to add manually many directories and unreal-scripts from sourgeforge to get the upgrade running.
- The C- and C#-testprogram are now able to connect, but are still not able to sent a message to each other. The programs are hanging on a tcp_accept after they close the old connection.
- Upgraded UT2004 to the lates
12 April 2007
- Tried to find the option to let the usarsim-server save the agent-position.log. Typing ucc help server display the standard ut2004 options. Unfortunatelly typing ucc server -h had the effect that a connection to the ut2004master.epicgames.com was made, and that the MD5 data was updated. I hope that USARsim still works.
- Another way to know the agent's position is to switch the option bDebug from false to true for the BotAPI.BotConnection in BotAPI.ini.
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004
Formatting Help?