Wishlist
- The WindowsAPI gives direct access to the new Windows 7 libraries, including Windows Imaging Component (WIC) APIs. It seems that the new GDI libraries are 30% faster. To be seen if the new GDI libraries are part of this new WindowsAPI code pack.
- Learning of optimal search strategies (in progress)
as/>study finished)
- Coupling with Nomad (accomplished, to be tested)
- 3D user-interface (open)
- Traversibility estimate from stereo vision (open)
itching.pdf>open
- 3D-Mapping (open
- Joint Rescue Forces list of tasks
- small tasks
- Reconnect when in range
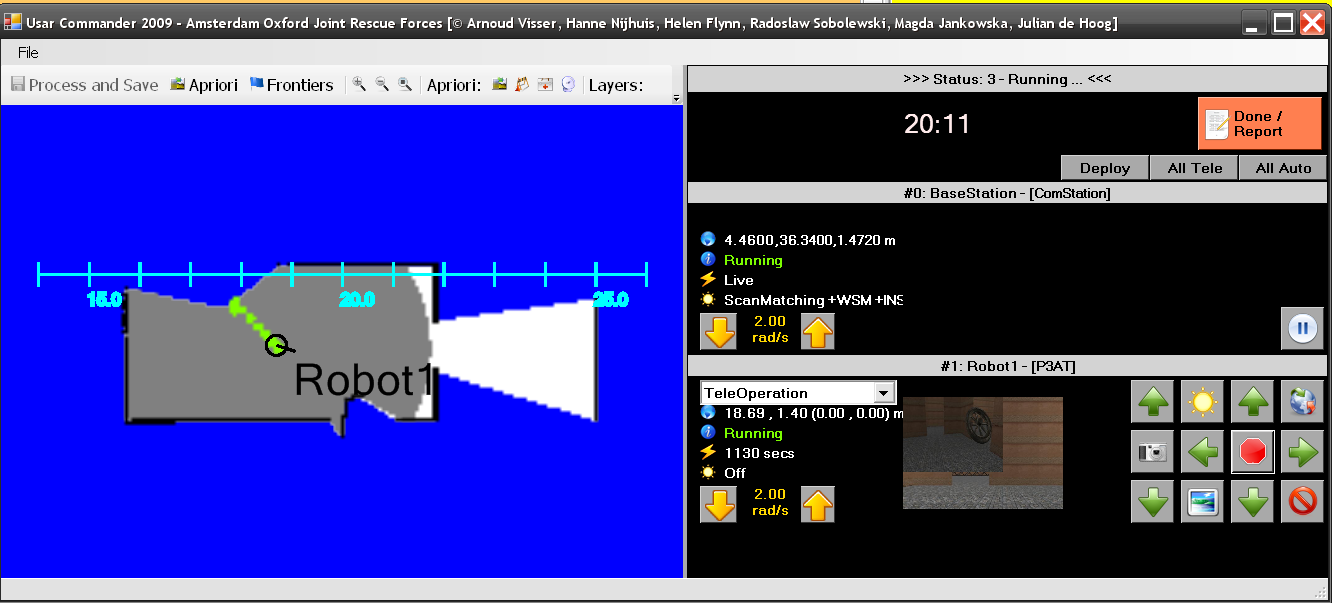
- Use status message to select view.
Started
Labbook 2011.
21 December, 2010
7 October, 2010
- With two computers in the 146.* domain I can make a connection. Yet, still no gui (even when local on a Linux machine).
- The students made a nice site, with an answer to most questions I encountered last days. This text about the usage should go with the code.
- Registered for the Human-Agent-Robot Teamwork workshop. Should submit a abstract to the coordinator (no deadline given yet).
6 October, 2010
- Setting the environment variable PYTHONUSERBASE finally enabled the reading of my own PIL-module. Unfortunatelly, I get the following ImportError "The _imaging C module is not installed".
- Copied the _imaging.so library from my source, and now it works.
- Copied numphy and wx-2.8-gtk2-unicode to my ~/packages/python/lib/python2.6/site-packages/. Now the script works (only UsarSim was not started).
- Even when UsarSim is started, I cannot connect to the simulation (even not with telnet).
- From nb-unreal I can spawn a robot, and the firewall of nb-unreal is off. Trying to get a new ip-number with repair. Didn't help. Tunis is in a different domain (146.*) versus 145.*
5 October, 2010
- Tested the examples I received from the computer science project. Cygwin used the PYTHONPATH variable for the socket implementation (which was set to Aldebaran's implementation). unset PYTHONPATH solved this issue.
- Cygwin uses its own /usr/bin/pl, while the external libraries (as Python Imaging Library 1.1.7, needed by the gui), where in D:\Programs\Python264. Using the SDK command prompt solved this issue.
- Next dependence of the gui was wxPython.
- The spawning details can be found in components/network.py: P2DX at location (5.5, 3.6, 1.805) in the YellowArena.
- Added in the USARBot.ini to the OdometrySensor the line bWithTimeStamp=True. Now the odometry-component is working.
- Next dependence of the position-component is numphy.
- The position-component fails on missing self.LaserPositionX. Lets first try map (still same error). Made an initialization and module now works.
- All components now work, but no gui-window shows up.
- Tried to run the components from Linux. The module position.py fails on from collections import namedtuple, both for python-2.5, python-2.6 and python-3. This was due that /usr/bin/python was explicitly mentioned in run_component.py. The code is not compatable with python-2.5 and python-3, only with python-2.6. With this version the known error No module named PIL pops up, which should be solvalble with a local install and the definition of PYTHONPATH.
1 October, 2010
- Reviewed article which used Featherstone's articulated body method with a Coulomb friction coefficient of 1.7 to check the dynamics of a P2DX robot driving an eight.
1 September, 2010
- Looked if there was budget in the SI4MS-project for a new 3D-gaming laptop. Tweakers is positive (25% faster with GTX 260m compared to GTS 250m) in it's review. Yet, with 3DVision on the framerates drop with a factor 2. For Batman (based on the Unreal Engine) the result is just acceptable (25 fps). Nvidea recommandents Toshiba A665-3DV, which has a GTS 350m. I prefer an Alienware M11 of 2 kilograms. i7-configuration with 4 Gb and Solid State disk cost 1993 euro.
23 August, 2010
- Found an unknown article about humanoid robots in UsarSim.
5 August, 2010
- Amer Nezirovic from Delft used ultrawide radar to detect victims under rubbage. More info in his thesis.
2 August, 2010
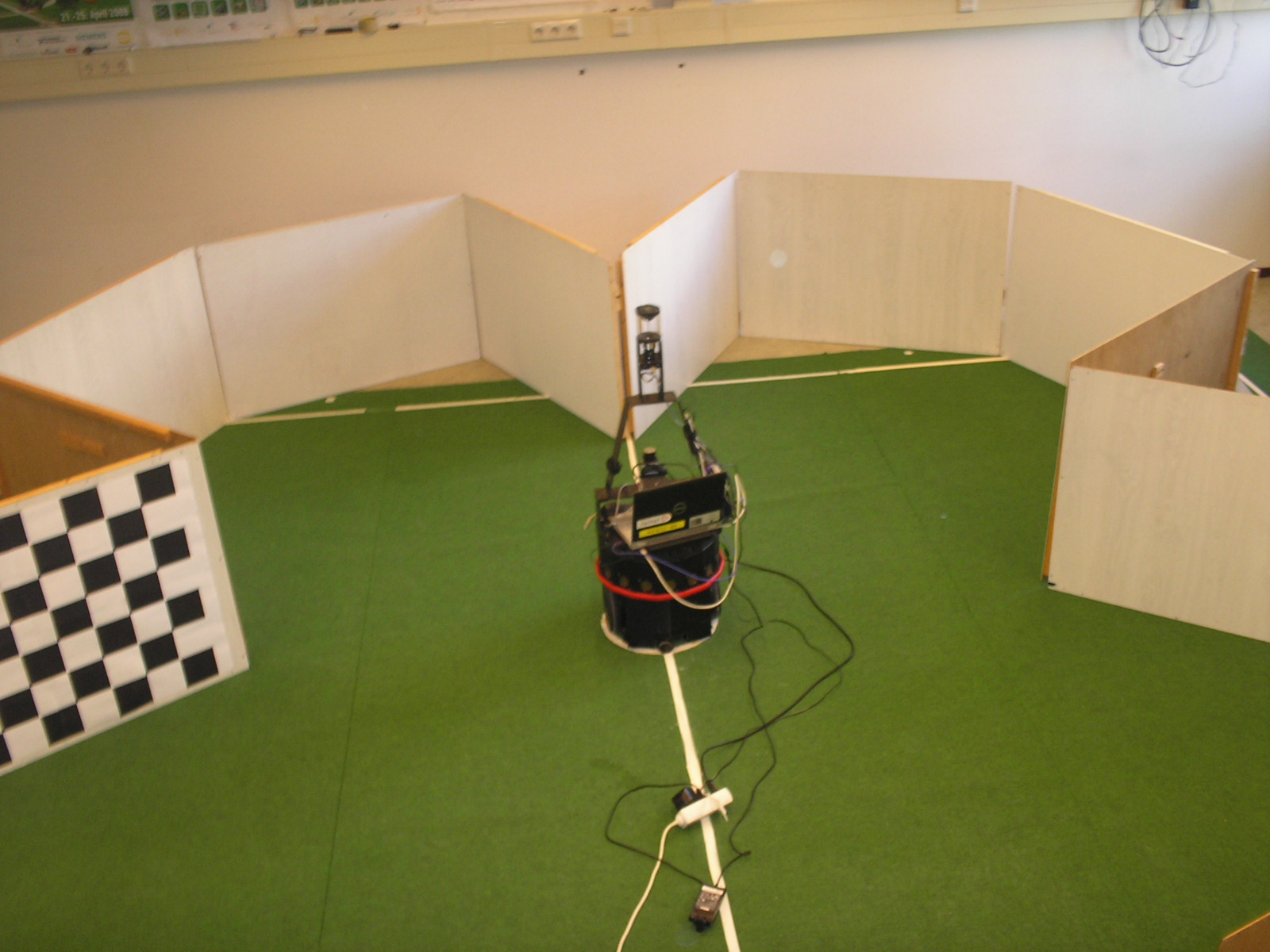
- Tried to reproduce Sullivan's starworld. Created on the soccerfield three points (at 90 degrees), pointing towards the center (1.15 from sonarring).
 .
.
Tried to get a logfile with good localization, but each time the scanmatcher was tricked to make a 90 (or 180 degrees) error. Changed after 3 logs to the old Manifold-settings (didn't help). After 5 logs I made the environment really symmetrical. After 9 I realized that the right starpoint was still less visible. The wires were in front of the sonars, so I raised them. That resulted in my best log . Still, the map shows four instead of three points and the lower point is less visibible for sonar:
 .
.
Tried two other tries with an oscillating search pattern (introducing more and more wall to the scanmatcher), but that didn't help.
- Analysis of the logfile showed that after 20 patches the number of pairs slowly drops, until at patch 32 a huge rotation is proposed, with only half the normal matches (266 instead of 500) and also a huge jump in the timestamp of the measurement is made from 35 to 61 seconds.
29 July, 2010
- The division of Pearson doesn't exist anymore, but the estimated publishing date of Mastering Unreal Technology Volume III is now September 11 according to Barnes and Noble. InformIt has bought the publisher SAM (of the previous Volumes), but Volume 3 doesn't appear in the expected releases.
- The opening angle of 20 deg (0.3491 rad) seems to be coming from Borenstein's article, which was the response on a pole in front of the Polaroid 6500 system.
- Made also the opening angle independent of the robot. MinRange and MaxRange are concervative compared to sensors MinRange and MaxRange (0.5m-4m) instead of (0.15m-10.7m). Bornstein actually used 0.5m-3.5m to measure the opening angle of 20 degrees.). Tried that value as max drawing range (nearly the value we use in the original ClearSpace layer.
 .
.
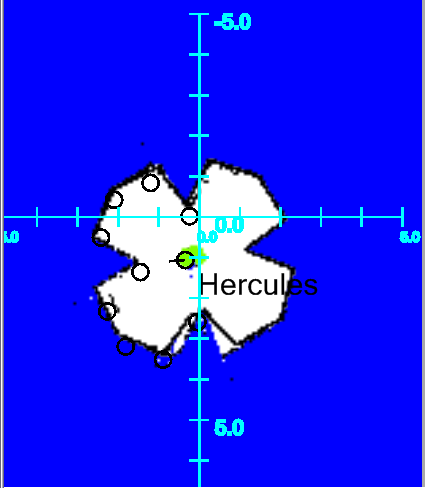
- Bornstein used a 1.75 inch (4.4cm) cardboard tube and a 2x8 feet (60x243cm) plywood board. Our board is 80x122cm, our smallest cardboard tube 6cm. Repeated the previous experiments, resp single pole, 80cm board, 122 cm board.
 .
.
Note that the single pole is visible (including the wall behind it). Also note that there is not much difference between the plywood board in portrait or landscape orientation. (All mapping with a 5 meter drawing range).
28 July, 2010
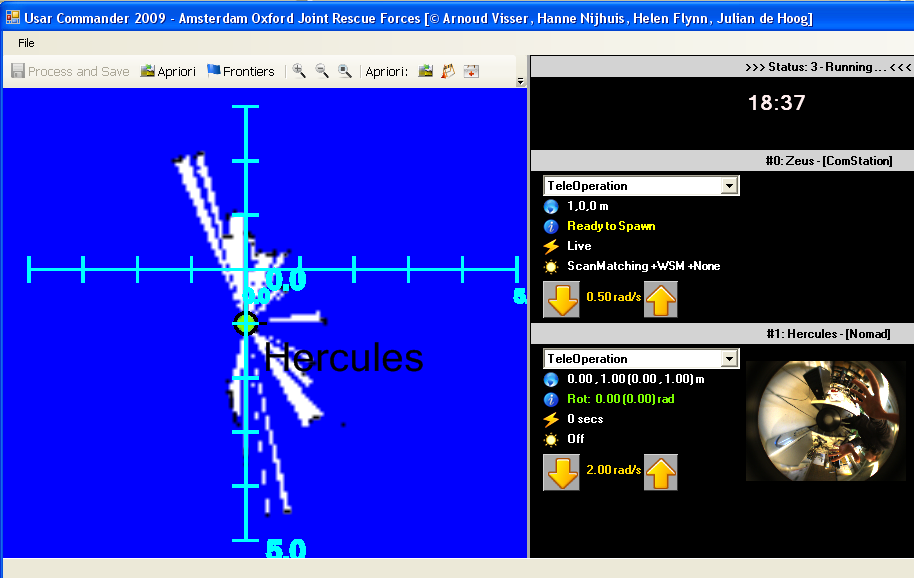
- Implemented Tachometer messages into NomadUsarServer. Added names to the camera and sonar in UsarCommander. Tried to create logfile without an obstacle for the wall, controlled by the joystick. The first turn was a bit too quick, later turns were more tranquil. Strange enough no GEO or CONF message could be found in the logfile (to be checked).logfile Analysis of the logfile showed that there are no odometry messages (or any other message) for 39 seconds (between 130 and 169). Around that time UsarCommander was blocked by a breakpoint. Should repeat the experiment with a release version. The scanmatcher has difficulties at times 106 (constant odometry values), 121 (constant since 117) and 169.
- Solved issue with GEO and CONF messages (UsarAgent.OnAgentSpawned was not called because BehaviorAgent.OnAgentSpawned now exists (UsarAgent is another assembly and no friend). Moved request for GEO and CONF to Agent level. CONF of camera is not used, but according to the manual I get CameraDetFov, and NomadUsarServer sends DetFov. For the moment ignored.
- Run UsarCommander in Release mode. Controlled the robot with the joystick. Only saw some gaps in beginning (sending CONF and GEOs?!). Needed 100 seconds to start NomanJoystick server. The logfile can be nicely processed, resulting in a map with 38 patches, all around 350 correspondences.
 .
.
- Tried the 2008/group4 visualisation on the sonar data. Unfortunatelly, with seed None the robot doesn't move (2008), but constantly adds patches (experimental, why?).
 .
.
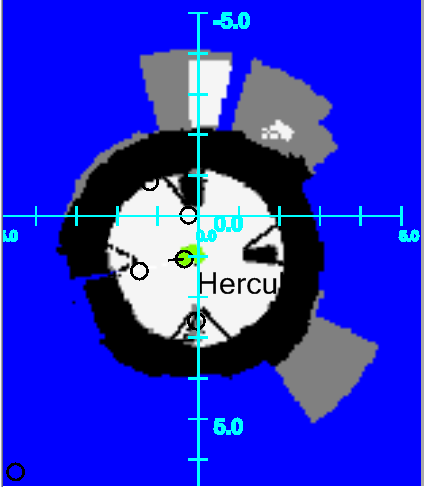
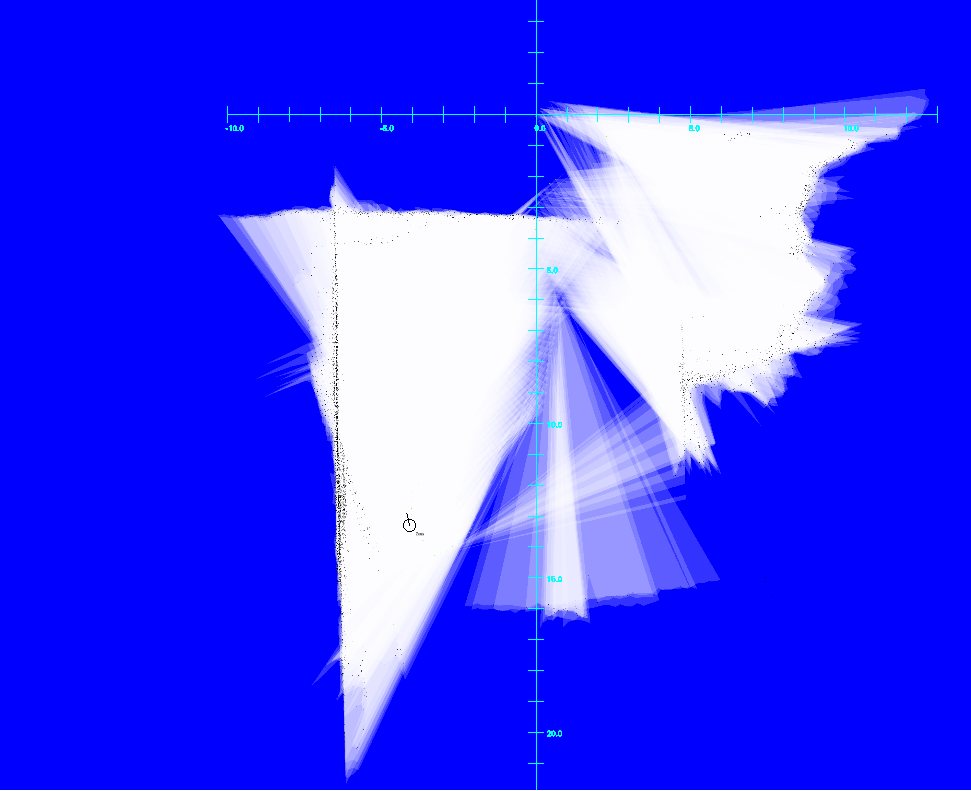
- Merged the 2008/group4 visualisation with experimental-branch, and made it RobotType independent. Result is quite good (with Odometry seed). Maps are respectively Laser, Laser/Sonar and Sonar:
 .
.
Note at the right side the Flat and Rough wall, which is only seen at straight angles. At the top is the Flat and Smooth plywood wall, which nicely shows the circular shape (including sidelobs). Combare with respectively Fig 6.3 and 6.2 of the Scout user manual.
27 July, 2010
- The certificate for edoroam on nb-zoran can be found on /usr/share/eduroam. Also the anonymous identity anonymous@uva.nl is needed, and PAP should be selected as inner authentication. Still, no success (trick was to add @uva.nl behind UvA-id, as found out later that day). Connected to vislab and commited the code (rev. 2170).
- Read the Programming and the User manual. The User manual has a nice example of sonar readings of a straight wall (smooth and rough) and a corner. Could not find the used error model in the simulation of the Nomad.
- Checked the unused lower Nclient interface to the sensorreadings, which includes a timestamp and location to sensor readings.
- When you select Odometry as seed, and there is no odometry, the y-offset explodes.
- Implemented a timed version of sensor_update, but both the pose measurements and the timemeasurements are more or less random. Result can be found here.
- Bas's NomadScout project's repository moved to svn://u014138.science.uva.nl/Nomad. Found GetWheelSpeed for Tachometer.
- Bas made a NomadPrintStatus program, with the same inner loop as sensor_update. Here no delays are visible and the update frequency is 10 Hz. Recorded logfile while Joystick controlled which could be mapped.
- Result are 37 patches. Three of the matches are bad (only 15,17,18 correspondeces). The first bad one (patch17) matches to an old patch (@ 11.41 sec). Strange enough, there is no measurements on 11 sec (only at 8.66 and 15.93) and no patch (check for patch0). Found out that this was a bug of mine (add 60 seconds per minute).
- Just before patch16 there is a gap of 13 seconds. Before patch17 the odometry is the same for 8 seconds). Tried to introduce progress in the number of matched pairs into the WSM algorithm. sumerror is nicely scaled, but still same 15 points are found.
- Bas has timed the send odometry. He only found a few seconds jumps when I send commands.
26 July, 2010
- Included a Time-segment to the sensor messages, and increased the update frequency to 100 ms.
- Repeated the third sonar experiment of 22 July. Good performance, until a full 180 degree turn.
- Switched Backup off (rev. 2168), and repeated experiment. Still there are problems with mapping.
- Problem seems to be related with Nomad->update. Between time 47.92 and 50.85the value of the Odometry doesn't change. After that moment their is a full second without measurements. After the second the orientation jumps from 0.72 rad to 0.38 rads (and a mismatch of the scanmatcher). Committed rev. 2169.
22 July, 2010
- Bas had turned off the Nomad Scout. Robot starts up with green button above the powerplug. Had to login on nomadu1 and start the server with bin/startNserver. Added some protection in TcpCommunication.vb.
- Made my second sonar logfile. Same setup as last Tuesday, only now with the plywood board on its side (note that the wood at the back prevent the board from being completely vertical). The board is 80cm wide. Turned Nomad on the spot (made several half turns). Note that twice the Nomad bumbed because it drove over its powerline. I combined SLAM with odometry, but didn't get Map updates.
 .
.
- Solved the Map update bug (bumbing compared always to the first measurement. If that one is an outlier, you never recover). Also important for competition and assistance-branches.
 .
.
- Made my third sonar logfile. Same setup as this morning, only now with the plywood board removed, so only two poles remain (note that I raised the poles, so that they are visible for both laser and sonar). The poles are resp. 42 and 44 mm thick and 745mm from each other. Turned Nomad on the spot (made several half turns), with the powerline disconnected this time. The first map update is 45 degrees wrong (also on the logfile). A check showed that the odometry made a sudden jump of 0.6 rad (34 deg).
 .
.
- Also in Landscape a jump occurs. The Portrait can be nicely mapped (tried to changing the sign of the Odometry, but then ManifoldSlam gets confused). Three observations:
- The turning in the logfiles is to fast, I should try again with lower speed.
- When there is a big discrepancy between the CurrentPose and the measured OdometryPose, a good seed could be in the middle.
- The map is extended when the NewPose is far from the CurrentPose. When too far, the absolute localization is gone and there is no need to reset the Odometry.
- Worked on the second point, but came to the conclusion that it is not strange that the matcher makes an error when a robot turns more than 45 degrees in a square room.
- Read tutorial about robotic software components. The section about Smartsoft looks promising, to create an interoperability layer above ths socket layer of the WSS. Seems interesting to try to connect robots and GUI of different teams. Should start with different years of my own team, and try to find out what the differences in patterns of messages are.
20 July, 2010
- Made my first sonar logfile. Nomad at the center of the Soccerfield, a plywood board one meter (94cm) in front of the robot, robot two and a half meter (234cm) from the wall. The board is 122cm wide. Turned Nomad on the spot (made several half turns).
 .
.
- GEO message for sonar is the first requested.
- Odometry only gives 2D-pose (x,y,theta). The timestamp is not included (created a protection for that in LogDriver).
19 July, 2010
- Finally continuing with the June 2 experiments with the Nomad Super Scout II. Found the hardware architecture in the 1999 Team Description Paper. Found the hardware architecture in the 1999 Team Description Paper. According to a Nomad Scout reverse engineered article, details about sonar can be based on the Polaroid 6500 datasheet. According to the Sonar Range Primer the 6500 module board is from Senscomp, which could be combined with several transducers to sonar range systems.
- Looked for other sonar datasets. Found a Pioneer-1 dataset at Machine Learning Repository. At Radish, I found P2DX at Stanford, Longwood, our Nomad'sFS2HSC dataset, the tPioneer in the Limerick dataset (measured and simulated) based on O Sullivans' master thesis, and finally Austin Texas.
- Thrun recomments the following sonar models: Blahut, Grunbaum, Etter.
- U0153 doesn't have Visual Studio 2005 any more, so the project is converted to 2008 format. Two settings were missing (from UsarLib and Agent), so added both DefaultBackUpFrequency and ShowOmniMap. Initial AgentConfig takes ages. Protected an non-existance LastConfig-file in AgentConfigDialog.
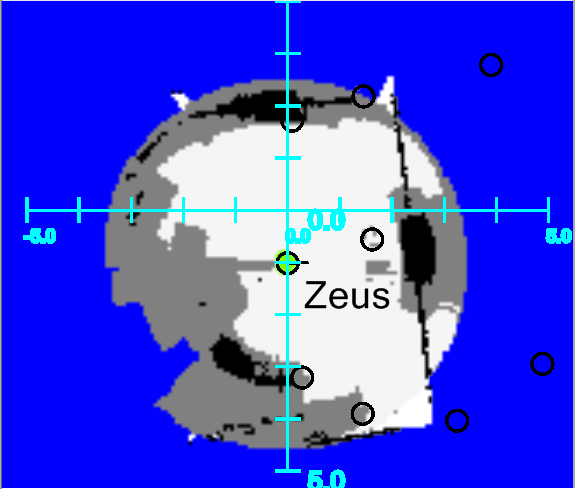
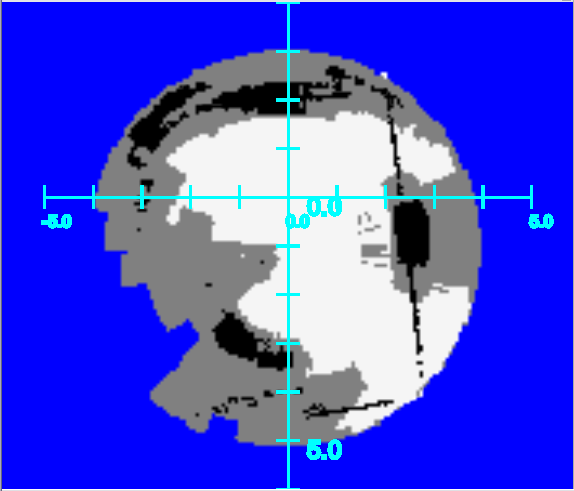
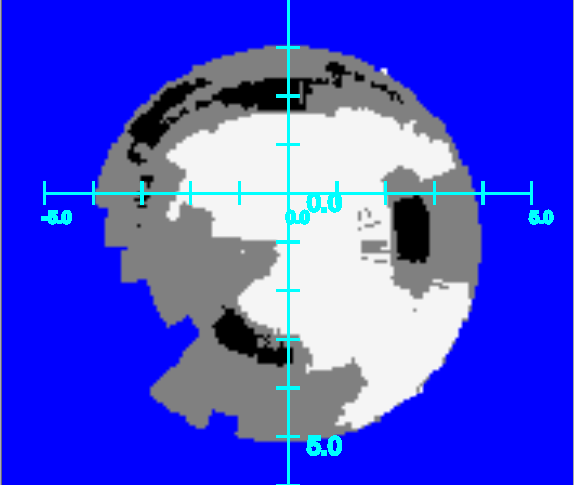
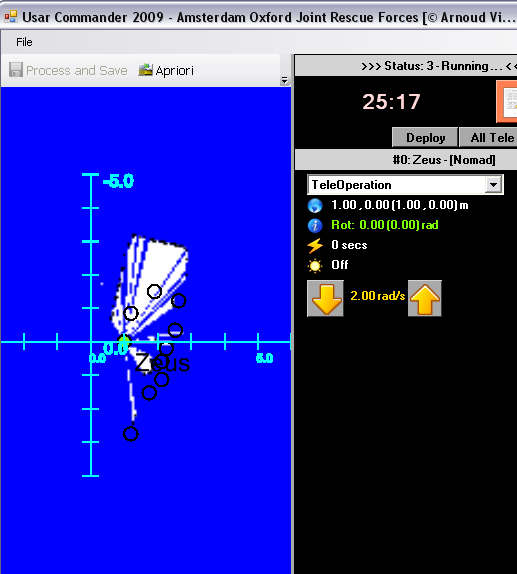
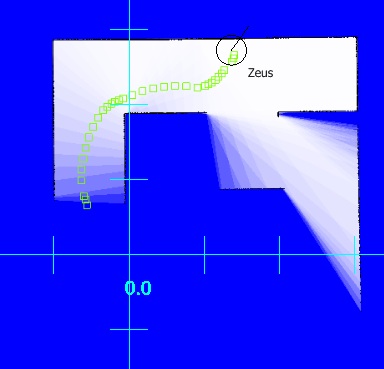
- Found the UsarServers in ~/projects/NomadUsarServer/src. Was able to start NomadUsarServer and the Sonar measurements were displayed on the AgentLagayer:
 .
.
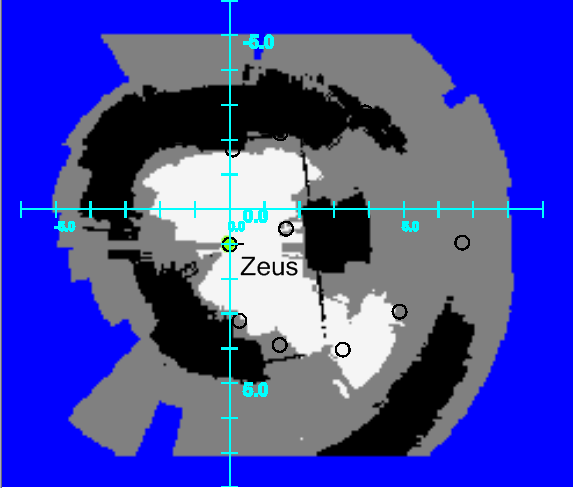
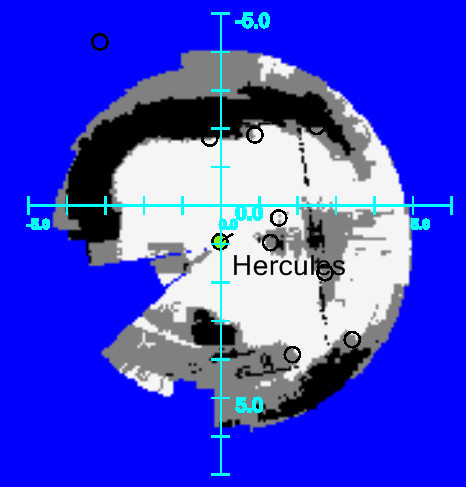
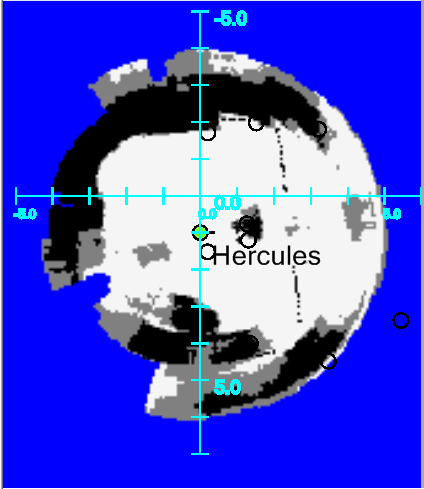
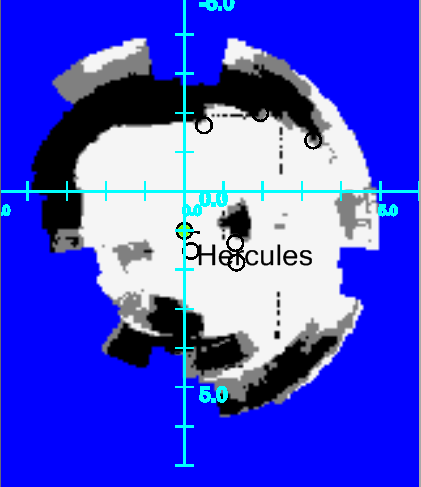
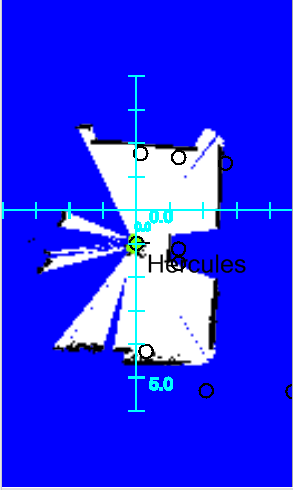
- CameraUsarServer said that no camera was found (camera needed power from notebook). Even with power, FirewireCamTest failed because I only had a terminal. Logging in as main user solved this issue. CameraUsarServer now found a camera, I could connect to the ImageServer, but no bytes were received. Also using Hercules instead of Zeus didn't help.
8 July, 2010
- Finally have the logout script which erases the svn-authentications working. I should add the following script to the logout script with Start->Run->gpedit.msc.
20 June, 2010
- Tested delay on IrOpenMap. Removed some debug statements out from Proxy, still the same delay.
- Checked out 2009/competition rev. 2100 (25 Jan, day before ICIS demonstration). Did the demonstration with spawn from commander, so the bug could already be there! Yes, code is also slow (although tested with 2010/UsarClient). Should add writeline to two last minute catches of Julian. This was already done in rev. 2107.
- Checked out 2009/competition rev. 1915 (July 13, directly after RoboCup).
Delay was only 3 seconds (when tested with Spawn from Commander :-). With proxy the delay is again slow.
 .
.
Changed following files
- Usar\UsarLib\Team\UsarAgent.vb ( ElseIf agentConfig.RobotModel.ToLower = "p3at" Then
Me.Mount(New LaserRangeSensor("lms200", LaserRangeDeviceType.SickLMS, 0.2F, 19.8F, 0.0F, 0.0F)) )
- Usar\UsarLib\Dialogs\AgentConfigDialog.vb (P3AT)
- Agent\Agent\WorldView.vb (IsNullOrEmpty(apriori)
- Agent\Sensor\Data\StatusData ( If msg.ContainsKey("View") Then
Me._View = Integer.Parse(msg("View")) )
- Looked at code, but didn't find any dependence on robotname (other than the mounting of the TiltedScanner and the Sonar-configuration).
- Checked out 2009/competition rev. 1910 (TeleOperation version of Julian). As slow. Should check with UT2004.
- Created (7 minutes before the competition run) a version which is fast enough. Work around was to stop the LiveProxyDriver from constant polling for images, and only request an image when the stop button is pushed (rev. 2163).
15 June, 2010
- Installed the ActorX plugin into D:\Programs\3dsmax_Design\Core\plugins on nb-unreal.
- Found the ActorX in the utilities tab at the right.
- Imported bocas_3d.3ds with convertion of units on.
- Saving the mesh gives standard warnings as 'Unsmooth groups processing' and other warnings such as 'No valid skin triangles digested (mesh may lack proper mapping or valid linkups)'.
- Also digested the animation. Got the message '102 frames, 199614 keys'.
- Strange enough, the output directory is still empty (no psk, no psa).
- After selecting the 'all textured' options (default only the skins are used)a get a psk-file (still no psa).
- Loaded the psk in the Resource browser. Added the mesh as a single actor. Much to small, so scaled up with a factor 250. Asked to build all, but got warning 'SkeletalMeshActor has no PhysicsAsset assigned.'.
- Looking at the different textures. Most door_*.tga are pictures of outer doors (only door_grA is without grade). binnend.tga is interesting.
- Opened package usarsim\Environments\OfficeRoomTexture. Package contains 14 objects.
10 June, 2010
- Finally starting with the Bocas-map. The Bocas-map is provided in both 3DStudio and OpenFlight. 3DStudio can not directly read in by the Unreal editor (according to usarsim documentation). So, I requested an educational version from AutoDesk. Had to choose between 2010 (6 month licencse) and 2011 (13 month license). Choose 2010, because the exist no Unreal plugin for 3ds Max for 2011 (yet). Unfortunally, my diskspace is finished on my desktop. At my notebook I have not enough diskspace (1.5 Gb free at C-drive). According to the system requirements, I need 3 Gb. For Maya, I need 4 Gb. My only change will be to try this at home. My desktop has now 4.3 Gb free. Finally something working (Max, not Max Design). Seems also to work for non-admins. My notebook has now 5.3 Gb free. Downloading Max Design. Also working.
- OpenFlight can be read by Blender. Openflight was in 2004 bought by AutoDesk, and for the 2004 software a plugin exists. The XSI Mod Tool is also bought by AutoCad, this is now Softimage Mod Tool. Softimage only needs 1Gb!
- Downloaded Blender, the tool which Julian also uses for the Kenaf. Julian found in February the following export script. There are no install instruction, but found at that the script has to be placed in .blender/scripts. The import of the 3ds file goes well, the export analysis the world, reports 1537 meshes and 0 armutures, and quits because it requires one mesh and one armature only.
Blender can import the bocas2009.3ds file, but can't export it to unreal format (which should be possible according to the documentation). Tried the export script mentioned in the documentation. This scripts is also from Darknet. It doesn't show up (because it requires Blender version 2.50 (unstable). It is also the previous version (v0.0.14 instead of v0.0.15). Difference is 'Fixed multiple objects when exporting to psk. Select one mesh to export to psk.' Selected with v0.0.15 a mesh-object, but still an armature is missing.
- Both AutoDesk programs install many components. Some of them can be configured to be installed on D, but not all. The installation on my desktop was incomplete due to lack of diskspace (again!). At my notebook it worked (I could also load the file, but I have to find out how to navigate to see the detail).
8 June, 2010
- Downloaded RangeSensorCalibration, to check the path that the robot has driven during the test. Unfortunatelly, there is constant an obstacle visible (extra pole on robot), so I should set the MinRange for both the laser and the radar on a larger number (currently 1.1m and 0.9m). Raising this value to 1.3m (for both) doesn't solve the issue (threshold seems to be on 1.6m).
 .
.
A lot of problems with the ImageResize bug.
- Raising these values to 1.8 and 1.5m solves the issue for the Radar, but the radar sees a wall at a constant angle (but a large range). Should check the logfile and the visual.
 .
.
My current hypothesis is that the directly passed in between two poles.
- Read How to make UT4 model discussion. For UT2004, the mainly depend on the Maya Tool.
3 June, 2010
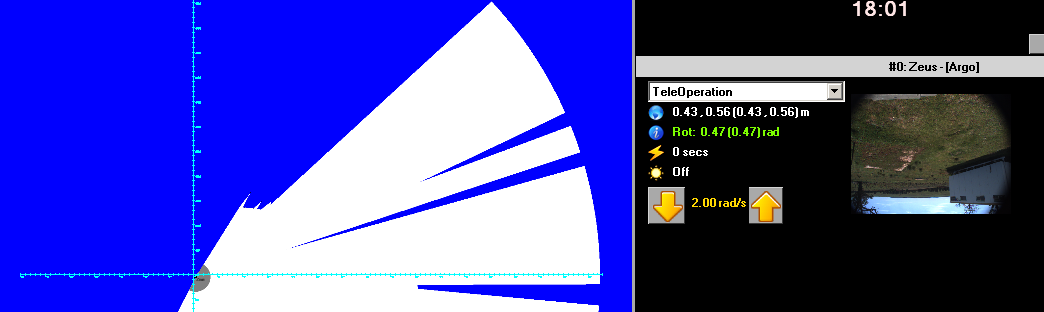
- Downloaded 29-DynamicDayTriangleClear, to test my modifications of yesterday. Unfortunatelly, the Triangle is another name for the clear area (not much to see). Good news is that the modifications didn't effect the Argo-code.
 .
.
Strange enough, the robot is drifting off again after a while.
- Downloaded 35-DynamicDayDamClear/. Also in this dataset such jump occurs (although once).
 .
.
Notice overlap of the trees, and the sharp wall at the lower left.
-
2 June, 2010
- The Nomad is working again, after a few library updates from Bas:
 .
.
The Nomad was also reacting on my drive commands. Couldn't drive far, because the robot is still wired.
- The experimental branch should now be merged with honours.
- Received a login on nb-zoran. Server can be found in ~/projects/NomadUsarServer.
- FirewireCamTest failed for me. Was not member of pgrimaging. After reloggin the issue was solved.
- NomadGetPose stops the sonar from clicking.
- Got same login on nomadu1. StartNserver to start server. After StopNserver the NomadJoystick-server on nb-zoran also has to restart.
12 May, 2010
- Implemented a first version of visualisation of the RadarSpectrum, but the current data is so huge that it takes much too long too find the maximum.
- Updated on U0153 the Intel Q35 graphics driver from 6.14.0010.4864
to 14.37.4.5218 (6.14.10.5218).
- Also updated the Network Controller drivers from 9.8.20.0
to 9.13.41.0 .
- HDMI-interface worked only in 4-colors, moved to VGA interface.
- Still, UT3.exe crashes on kernel32.dll. Followed the suggestion of jaff0 on the forum, and switched bInitializeShadersOnDemand=True.
- Same problem. Inspected Launch.log: Device does not support 1x32 FP render target format. Run dxdiag to look for DirectX properties:
DDraw Status: Enabled
D3D Status: Enabled
AGP Status: Not Available
DDraw Test Result: All tests were successful.
D3D7 Test Result: All tests were successful.
D3D8 Test Result: All tests were successful.
D3D9 Test Result: All tests were successful.
- Found this FAQ at beyondunreal. The suggestion was to go into the BIOS, and under video properties, increase the Shared Memory to 256 MB. Make sure you at least have 1 gig of ram for UT3 to run. If your BIOS does not have the Shared Memory setting in your BIOS, you will need to get a new video card. I'd recommend getting a video card on or above the NVIDIA GeForce 9 series and the ATI Radeon 9600.
- Looked at dxdiag again, and Display Memory is set on 384.0 MB (which is more than 256Mb). Could not increase Display Memory (BIOS password protected). 384Mb seems to be the maximum for the chipset (see ibase specs).
- Try tomorrow a Nvidea card.
29 April, 2010
- Have the synchronization working. Commited Rev. 2150.
- Unzipped the Visual dataset again with command bzip2 -cd VideoVisual.tar.bz2 | tar tvf - from the cygwin-prompt, because the directory only had the first 412 images.
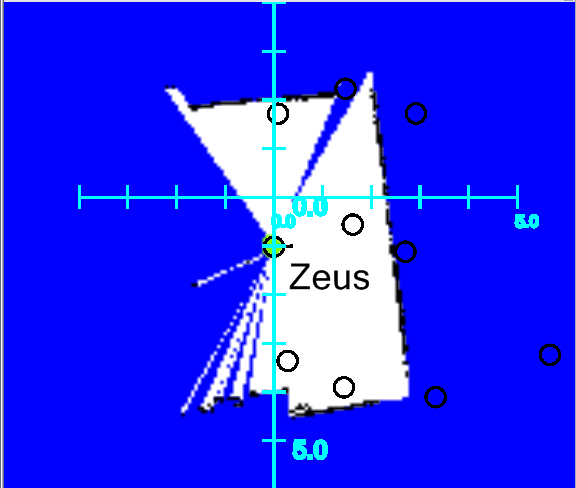
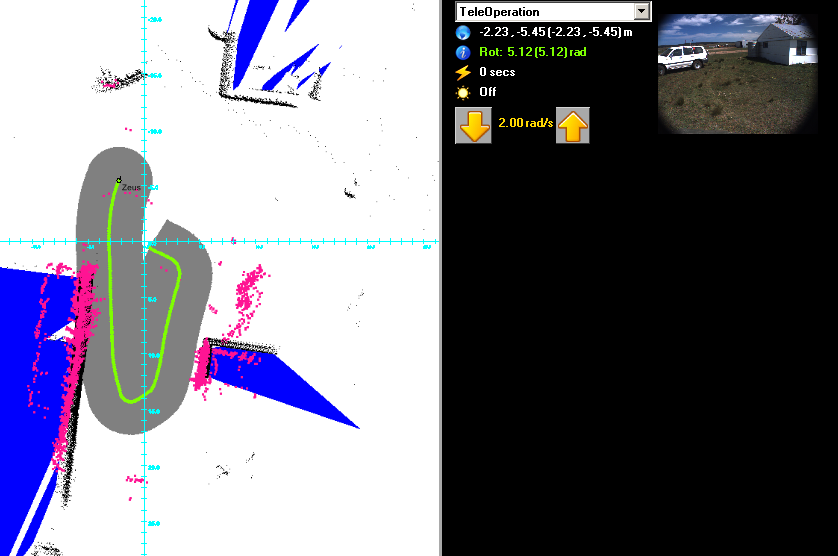
- According to the VideoLogAscii.txt, there are 2651 images.
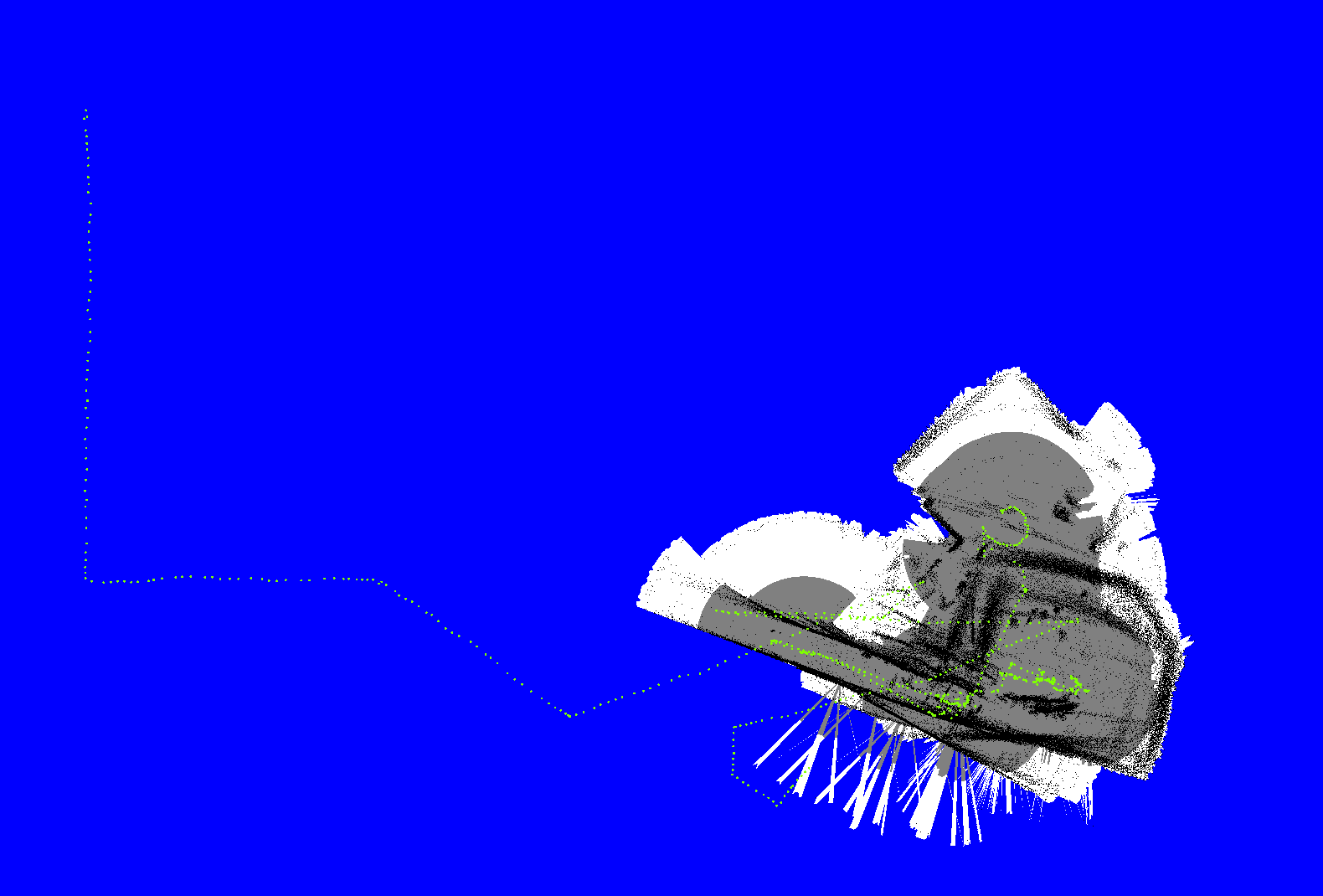
 .
.
It is clear that the left object at the top is a white truck. The round obstacle to right is a tree.
- Program seems to run out of Memory in BufferedLayer:line 69 and ManifoldImage: line 78.
28 April, 2010
- Solved the saving issue. Cause was that Operator's patches were not considered. Now they are, if the operator is the only TeamMember. The radar is not shown on the map, because only the patches are rendered, and the radar is not stored as part of the patch.
- Checked the BMP file-format at wikipedia, and implemented a reading the video from Marulan.
 .
.
Only have to flip the image and check if the other sensors are also read out.
- Flipped the image (not completely correct, because the blue is now purple), and found out that both Laser and Radar are reversed.
- According to mtsay at a msdn forum, a BMP-file should be Flipped along the Y-axis only. So Laser and Radar are still correct (and the colours too).
 .
.
Committed revision 2147. Leave synchronization for tomorrow.
27 April, 2010
- Finalized the merge from experimental with 2009/assistance. Had some issues with the GroundTruthOffset (Australia is quite far from the Equador). As hoped, the trailing of the AgentLayer is gone:
 .
.
- Remaining issues:
- Saving the map (done 28 April).
- What is the cause of the double walls?
- Checking the pitch to prevent drawing the ground.
- Adding video.
- Adding RadarSpectrum (seperate layer).
23 April, 2010
- Visualized the RadarRange measurements (DeepPink in ObstacleLayer). Angle had to be revered to be correc
t, because the RadarSensor is rotated around the Y and Z-axis. Put a MaxRange of
9m, because otherwise I see a lot of ground (tried 40m, 12m, 10m and 8m). Selected a MinRange of 0.9m. MinRange of 1.1m works fine, 0.8m gives 3 nearby measurements, 0.6m many nearby measurements.
 .
Committed revision 2141.
.
Committed revision 2141.
22 April, 2010
- Implemented the RadarRangeSensor. Not all angles are scanned, even after 360 measurements, so maybe I already have to give an update after 180 measurements. Counted and found 189 measurements for a full circle. Committed revision 2140.
21 April, 2010
- Download both radar files (range and spectrum) from Australian Centre for Field Robotics. The spectrum was too big for Notepad++ to read. The range data is a bit strange, because every range has its own timestamp and the bearings are not always the same. Nice puzzle how to aggregate this data.
20 April, 2010
- Tried to do export CVSROOT=:ext:physar@usarsim.cvs.sourceforge.net:/cvsroot/usarsim;cd usarsim/Tools; cvs -z3 commit. Had to install cvs, openssh and vim package to cygwin. Finally did the commit from directory D:\cvs
- Tried to remove the dependence between agent and map. Still, there is a mixing of file reference with a project reference. Currently Map uses Agent.dll. Check why Manifold should have GetCurrentPatch(agent) and GetCurrentPose(agent). Could replace RenderAgent with a call with name, size, pose.
- Following is a ManifoldObserver. In principle this should be handled with a having an additional ManifoldImage for following. (which is a Observer).
- Should implement a CurrentPoseEstimate with a seedmode.
9 April, 2010
- A lot of problems to get the final in UT2004 running. Problem was Multiview, which didn't work for all UT2004 maps. Problem seems to be dat the PanTilt MskPkg is missing in the USARBot.ini from
the latest UT2004 distribution. The ini files used in the previous year didn't had that problem.
8 April, 2010
- RunnerUp final is about to start and suddenly I have have trouble connecting. Even after spawning I get failure from unreal not connected (while I received first message).
- Checked firewall, off
- Restarted WSS en upis. Checked ip.
- Tried IranOpen\competition, with Agent without Odometry mounted. The same problem, although version from last Monday!?
- Problem was that the removed upis from the startscript, so no ImageServer was present.
- RunnerUp final didn't went well. The lack in the communication was awefull (40 seconds or more). After 12 minutes, I checked if I had a backup map, and changed to FollowCorridor behavior. The interface froze.
- Delivered the map, but it Virtual Reality (which used Steel's code as basis) had clearly explored far more area.
- Commited version 2129.
7 April, 2010
- According to the Iran Press , there are 320 teams from China, Holland, Germany, the US, Brazil, Britain, India, the Philippines and Pakistan at the Iran Open.
- Have to speek at the Opening Ceremony.
- Got the work of Okke operational just in time
- Mapping Challenge failed in the same way as yesterday. Yet, this time I have logfiles. Couldn't rerun the logfiles in time to deliver a map.
- Now I can run the logfiles. Strange enough, the messages are read, and all observers notified, but ProcessSensorUpdate is not reached.
- When SpawnFromCommander is selected, ProcessSensorUpdate is reached. With seed=None the Match silenty fails (errormessage is written to Debug screen in Studio).
- With seed=INS the ScanMatcher tries to match two patches with scan.length = 5 ! I am sure that 181 points are read.
- Null patch is returned on Odometry data (Hanne's implementation for AirRobot)
6 April, 2010
- Still more than 100 errors to go, but first the casting from ProxyAgent to agent should be solved.
- Setting up Test PC1 (192.168.0.14) with 2009TeleOperation map.
- Robot1 24.19,9.05,4.81 0.00,0.00,0.00
- Robot2 24.21,7.55,4.81 0.00,0.00,0.00
- Robot3 25.74,9.04,4.81 0.00,0.00,0.00
- Robot4 25.72,7.55,4.81 0.00,0.00,0.00
- Robot5 27.45,9.05,4.81 0.00,0.00,0.00
- Robot6 27.43,7.57,4.81 0.00,0.00,0.00
- Robot7 29.15,9.03,4.81 0.00,0.00,0.00
- Robot8 29.12,7.57,4.81 0.00,0.00,0.00
- CommStation 40.48,0.63,4.51 0.00,0.00,0.00
- Position1 35.47,8.86,4.81 0.00,0.00,0.00
- Position2 50.96,8.24,4.81 0.00,0.00,0.00
- Position3 62.64,7.93,0.72 0.00,0.00,0.00
- Position4 54.13,-2.19,2.76 0.00,0.00,0.00
- Position5 24.86,-8.10,4.81 0.00,0.00,0.00
- Position6 46.23,8.95,4.81 0.00,0.00,0.00
- Position7 57.88,8.12,4.81 0.00,0.00,0.00
- Position8 63.44,-8.04,4.81 0.00,0.00,0.00
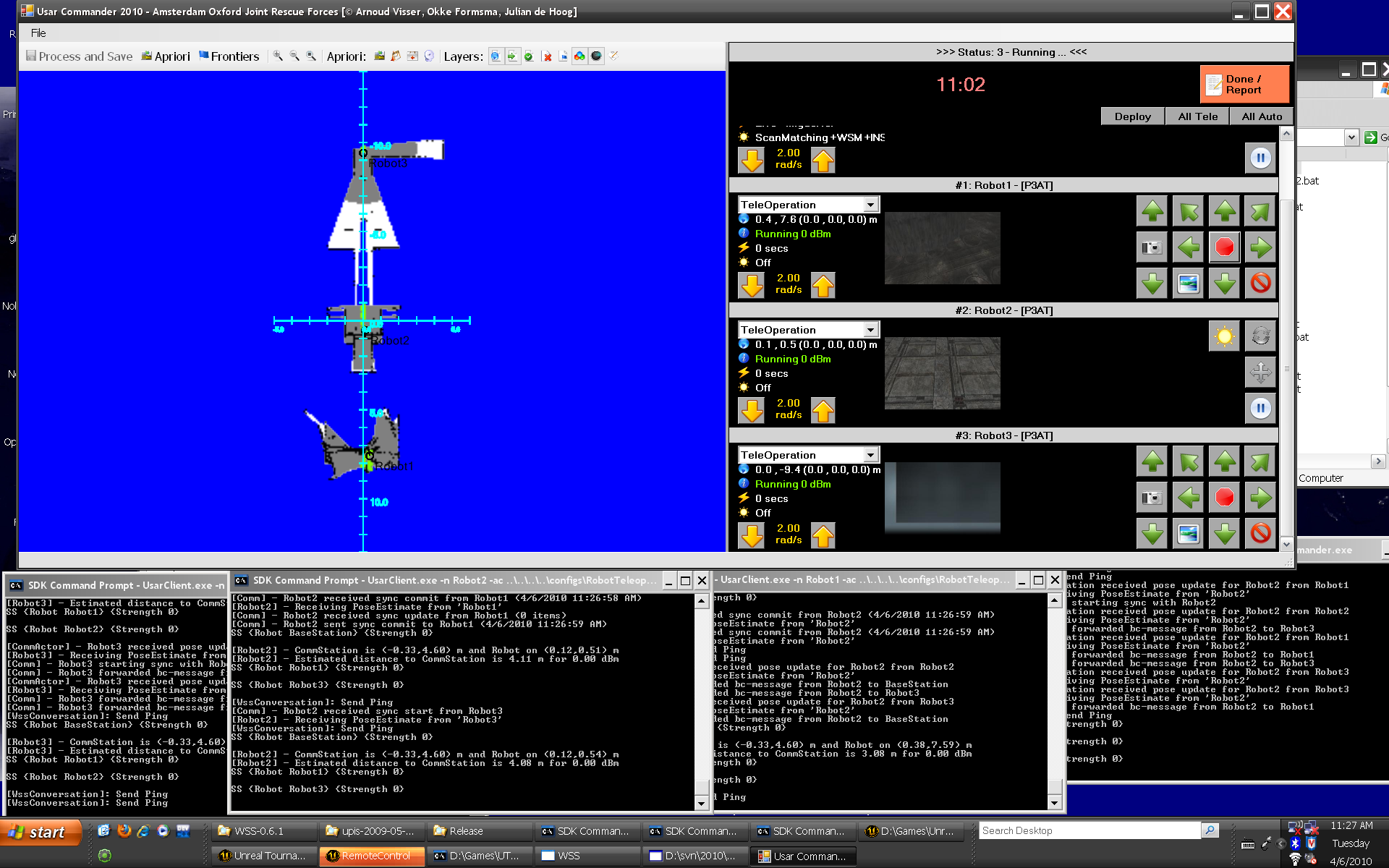
- Testing with 3 robots went very well, 4 not. I will run with 3.
- Placed Robot2 at startposition Robot4, so every level has robot. No Map needed, no backup.
- While preparing the setup, I get a exception in SpeedUpClick. Checkout another version of 2010/competition to debug.
- TeleOperation run went bad. No Position updates (due to no GroundTruth or different name LaserScanner).
- Testing on a fresh made Maze (12x12), Yellow, 5deg.
- Robot_0 -5.9320,-5.9320,1.4032 0.0000,0.0000,0.0000
- Robot_1 5.9320,5.9320,1.4047 0.0000,0.0000,0.0000
- Robot_2 -5.9320,5.9320,1.4032 0.0000,0.0000,0.0000
- Robot_3 5.9320,-5.9320,1.4047 0.0000,0.0000,0.0000
- Robot_4 -4.8900,-4.8900,1.4387 0.0000,0.0000,0.0000 Robot_5 4.8900,4.8900,1.4376 0.0000,0.0000,0.0000
- Robot_6 -4.8900,4.8900,1.4387 0.0000,0.0000,0.0000 Robot_7 4.8900,-4.8900,1.4372 0.0000,0.0000,0.0000
- Robot_8 -3.8480,-3.8480,1.4032 0.0000,0.0000,0.0000 Robot_9 3.8480,3.8480,1.4047 0.0000,0.0000,0.0000
- Robot_10 -3.8480,3.8480,1.4032 0.0000,0.0000,0.0000 Robot_11 3.8480,-3.8480,1.4047 0.0000,0.0000,0.0000
- Robot_12 -2.8060,-2.8060,1.4387 0.0000,0.0000,0.0000 Robot_13 2.8060,2.8060,1.4372 0.0000,0.0000,0.0000
- Robot_14 -2.8060,2.8060,1.4392 0.0000,0.0000,0.0000
- Robot_15 2.8060,-2.8060,1.4372 0.0000,0.0000,0.0000
- Server detected a Win.NETAPI.bufferoverflow exploit on port 445 from my machine. According to Kapsersky forum, the problem is described in this Microsoft security report. Turned the firewall on.
- Merged with 2009/competition code.
- BaseStation does connect to image-server (when option is active in AgentConfigDialog).
- Camera was sticking through the wall:
Moved the camera from X=+0.1005 to X=-0.1005.
- This is much better. Maybe X=0.0 and a little tilted downwards.
- Connection with Upis doesn't work. Is this because all media are disconnected ?(no ip-adress, so also no loopback?)
- AgentPatchController designer window can't be loaded. Change in project?
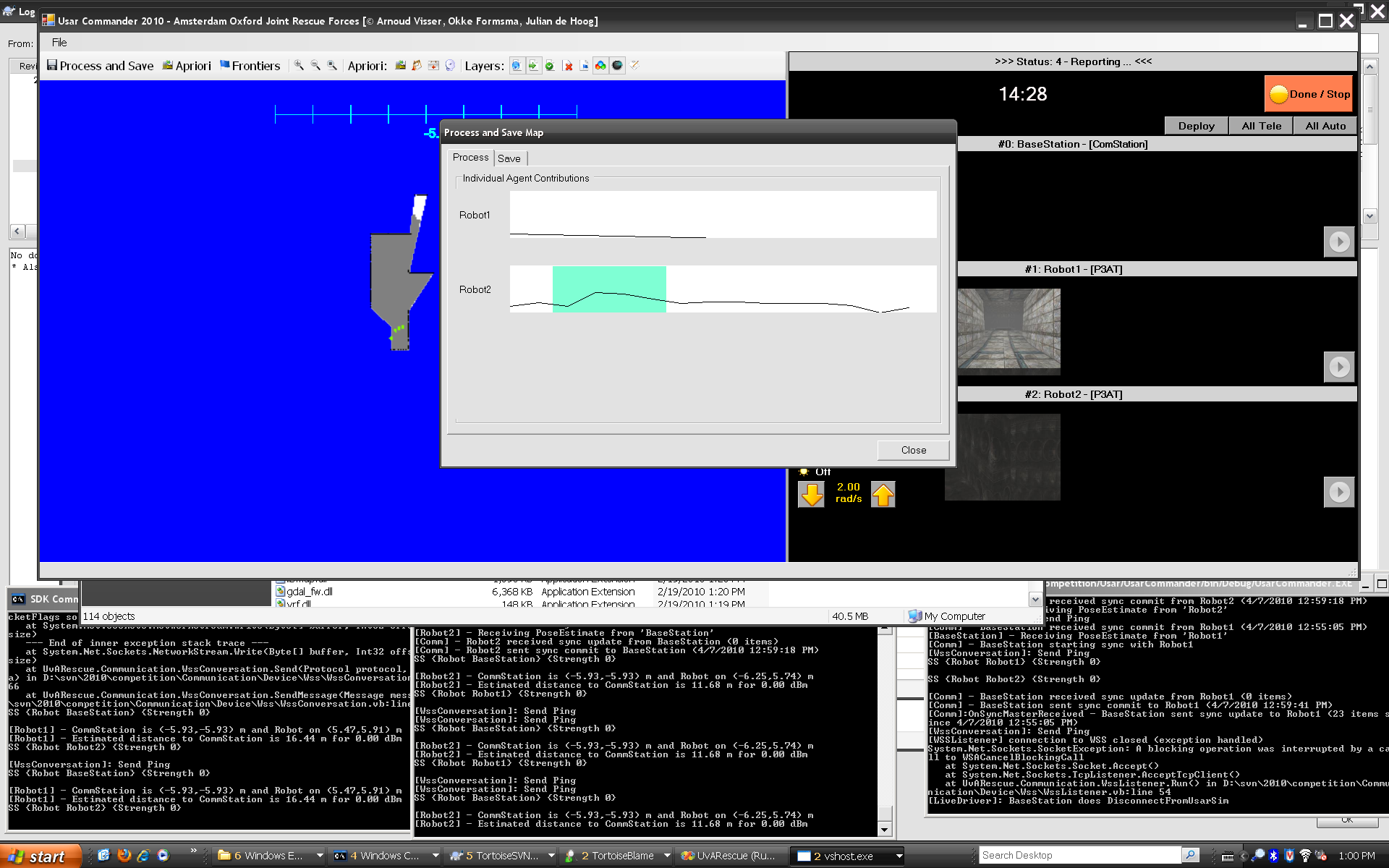
- During the TeleOperation test, no map updates were given.
Tried to reproduce the error with same ini, but failed:
 .
.
- Later I found that this error was due to the AirRobot code which kicks in when Odometry is present in ini-file.
5 April, 2010
- Should check code with compression true in WssDevice. Done
- Checked code with 4 robots. Response get awfull slow (also with Polling Images off).
- Should limit the broadcasting between robots (only to ComStation).
- Should get the CorridorCode from Honours.
- Trick to get triggers working was to chance the ClassProximityType from Pawn to Actor. Added this to the FAQ.
- Possibility would be to increase the synchronisation_interval in OperatorAgent.
- Why do I get 'A first chance exception of type 'System.NullReferenceException' occurred in UvARescue.Agent.dll' directly at startup (and four threads that exit?) Same occurs when an agent is spawn (just before ManifoldImage:New).
- Why is the Manifold and ManifoldImage part of Agent namespace?
- Is the AcquireReaderLock needed in OnSyncStartReceived?
- Only write to manifold if Operator in OnSyncMasterReceived? Lets try
- Should remove the [Robot2] -- proxy receives camera image, [Robot2] -- should update backgroundImage
- It seems that there are too many poseupdates between the robots. Increased it from 1/5 to 1/15 (3x).
- Result, system doesn't update anymore. Try tomorrow less than 5?
- Moved culture from thread to WssDevice. Check internet 'import namespace System.NullReferenceException' (Nothing Found).
- Check tomorrow speed 2009 code with 4 robots.
- Move Map from Agent to Lib?!
4 April, 2010
- Arrived at the Iran Open.
- Wssdevice back to rev 2105. ComStation directly crashed on an assert, because I forgot to start the WSS. I can control the robot in the Mapping world, and I receive PoseEstimates from the robot at the BaseStation, but no LaserScans or images. Lets first test the TeleOpMap.
- No connection estiableshed for UT3. Could be do unclean restart. Try again clean. Result is the same:
BotDeathmatch:SpawnPlayer called
Couldn't spawn player of type None at none
ScriptWarning: BotConnection DM-RobotTeleOp ...TheWorld:Persistentlevel None 'UsarVehicle
Createl robot: USARBOt.ComStation BotController_0
- The WSS saw nothing.
- Changed the ComStation from Actor to UsarVehicle. Still no reaction from WSS, and SyncActor complained about missing CollisionVolume / StaticMesh.
- Decided to use a stationary robot as ComStation.
- Checking why no sensordata is received in 2010-code. Changes in Driver-directory seems OK. Changes in Agent-directory also (where is the ProxyAgent.Spawn coming from, is this solved in assistance?).
- The camera images are now received. To be checked, the proxy already receives images before the UsarAgent is started. Commited rev. 2121.
- Looked at the LaserScan updates. A sync start is requested, but conversation complains that the message is not serializable (read / write block?).
- Robot receives Drive commands very late!
- Solved the bug (omnicam image as part of the patch).
- Should make clear that the OperatorAgent doesn't update image. Don't mount any sensors anymore on ComStation
- Robot2 has 4 subviews (due to configuration (no multiview).
- Solved this issues, and added Flip, FrontLeft and FrontRight buttons as bonus.
1 April, 2010
- Testing the new Comstation (usarsim rev. 300). Some complains from GUI:
- SonarSensor: Unknown RobotModel <- UsarOperatorAgent
- SonarSensor: Unknown RobotModel <- UsarProxyAgent
- ProxyAgent: Do not Spawn!
- UsarClient connects to WSS 0.6.1 (NoopPropagationModel), but crashes after:
- INITREPLY {Status OK}
- SS {Robot BaseStation} {Strength 0}
- ...crash
- Crash was probably due to not up-to-date teamconfiguration. Yet, also a connection to an UT2004 world (DM-KenafTest_250) gave an error (both bots connected, connection refused during establishment on port 3980). Refused by nb-unreal (while FireWall is off). Couldn't find robot, so maybe second spawn-position is wrong. No, robot model is wrong :-! (P3AT instead of P2AT).
- Still, an error occurs in WssConversation.SendMessage (line 471): connection closed by foreign host (WSS says could't connect, connection refused).
- Check with 2009/competition code. Same problem with 2009/competition code.
- Could be WSS version, or pc-unreal firewall, or loopback. It was loopback! Finally, I have contact.
- Also contact in 2010/competition code, yet no image or measurements. SS seems to work. Only one error message: WssConversation:SendMessage (line 456) (No serializable binary ) after sync update (3 patches).
- Should try to revert WssDevice to rev. 2106.
31 March, 2010
- Direct link to the editor seems to be D:\UT3\Binaries\UT3.exe editor -nohomedir -mod=..\usarsim -log -useunpublished.
- Activated in Config/UTUSAR.ini (rev. 293) the GroundTruth, the Battery and the Camera. Now the camera works (although I should correct the resolution (a few hunderd pixels around the multiview panel). Changed the game resolution from 800x600 to 640x480.
- Tried start position 0.0,-1.0,+2.26 to get at the lower floor between the elevators. Not working, trying to get down via the slope. Robot is jumping. Will control try to control the robot from another machine.
- Changed INS from UU to SI. Seems to work, values are close to GroundTruth.
- At start:
SEN {Time 950.5764} {Type GroundTruth} {Name GndTruth} {Location 0.00,-2.43,-2.26} {Orientation 0.00,0.00,1.60}
SEN {Type INS} {Name InsTest} {Location 0.00,-2.43,-2.26} {Orientation 0.00,0.00,1.60}
- At end:
SEN {Time 1237.5062} {Type GroundTruth} {Name GndTruth} {Location -1.54,8.03,-0.70} {Orientation 0.33,-0.42,1.09}
SEN {Type INS} {Name InsTest} {Location -1.70,8.10,-0.62} {Orientation 0.29,5.98,1.10}
- Scan Matching on INS also works fine. Commited change to rev. 295. Multiview also works for Robot1.
- Multiview doesn't work for Robot2 (if no other robots are spawned).
- Start position 0.0,0.0,+0.4 (theta=-1.6044) brings you on the lowest floor between the elevators. Deadreackoning on INS gives many errors on lowest floor. Good target position is 0.0,8.3,+0.4.
- Second start position 0.0, 4.4, -0.7 on the second floor, to be combined with goal position 0.0, 0.3, -0.7
- Third start position 0.0, -7.8, -1.8, combined with goal position ,3.8,0.0,0.4.
- Fourth target position 0.0000,-2.4320,-2.2600, to be combined with 0.0,8.3,-0.70 (theta=+1.6044).
- Changed DynamicLighting in UTEngine.ini, but robot and elevator still black.
- Configuration with 4 robots works now (after changing MultiView settings in UTUSAR.ini).
- ATRV is too big for this Map. It goes trough the ceeling:
 .
.
- Added SmokeGlobal. The location to add the smoke is important, so I did it above the water. Used default properties (Density 0.000050).
- Added RegionSmoke and DynamicSmoke. With 25 particles, the 4 robots start jumping. With 10 particles and 1 robot the result was better:
 .
.
The rubbish on the map are collisions of the laserscans with Smoke.
- Moved 'Unreal Tournament 3' to 'UT3'. Unfortunatelly, upis complains about DetourCreateProcessWithDll fails.
30 March, 2010
- The svn-server is crashing. Should check Settings on System Failures and How to read a small memory dump file.
- Copied DM-KenafTest_250 to pc-unreal. Had to replace System/FreeImage.dll with upis-2009-05-28-beta/FreeImage.dll.
- Tried RobotTeleopRobrecht_v2. The map seems to be quite different. One startpose: 0.0, -2.432, -2.26 0.0,0.0,-1.6044.
- Installed 2010/competition on pc-unreal.
- Didn't had control over the camera.
- Complains of Tachometer division by zero (Solved before).
- Many messages from SkidSteeredRobot, although no Debug statement in code. Check.
- Added RobotTeleopRobrecht_v2 as known map. PlayerStart works, although UTGame\Logs\Launch.log gave a warning:
Error: (Function UTGame.UTGame:ChoosePlayerStart:008A) Cannot use AllNavigationPoints() here - NavigationPointList not set up yet
ScriptLog: Warning - PATHS NOT DEFINED or NO PLAYERSTART with positive rating
- Driving around with INS failed (-4.5, -833 seems a lot). My hypothesis (UT units).
- Lighting is also wrong on vehicle (same as early version of MazeGenerator).
29 March, 2010
28 March, 2010
- Just adding GlobalSmoke to a room (used RampRoom.t3d) is not enough, the export is only 3 Kb, instead of the original 46 Kb.
24 March, 2010
- Downloaded UT3ScriptSource_1.5.rar. File contains UTGame\Classes\UTVehicle.uc, which extends UTVehicleBase.uc, which extends SVehicle. Copyright 2008.
- Same file also exist in UDK, but is rather short:
class UTVehicleBase extends UDKVehicleBase
deprecated;
- The file UDKBase/classes/UDKVehicleBase.uc extends SVehicle. Copyright 2010. Doesn't seem to have much difference.
- Downloaded UDK 2010-03 Beta version 6383. Package installs also VS2008 redistributables and Direct9c.
- Tried to load World_Generator\*\Modules\Mod2x3\RampRoom.t3d in UDK. File->Open leaded to a crash. Loading the room into a new map with Import worked better.
- Loaded texture Maze.upk via View->ContentBrowser->OpenExternalPackage. One warning:
Texture2D UN_Cave.BSP.Materials.T_UN_Cave_Rock_Floor_D in Maze.
- OpenExternalPackage USARSmokePackage.upk failed.
24 March, 2010
- Read an IEEE Spectrum article about an algorithm to measure the artifacts of a camera, and can be used to correct errors in the wavefront. The algorithm, the modified Gerchberg-Saxton algorithm, could maybe used to produce artifacts in the ImageSrv.
- Found the publisher of Mastering Unreal Technology Volume III. Estimated publishing date is tomorrow or June 21, 2010. Unfortunatelly, Pearson is not part of Springer.
22 March, 2010
- Looking on RobotModel dependence of AgentLayer.
- Current drawing was slightly off (-2.4 + i) = {-1.4, -0.4, +0.6, +1.6} instead of {-1.4, -0.4, +0.4, +1.4}.
- Also equivalent code in ManifoldSLAM.
- Modified code, result looks quite good, although there seem to be an offset to the left (should the offset also be modified with the robot.pose?).
- Modified the offset (sketched the situation and came to the same formula as used in CameraSensor). Result looks better, compare with map from laserscanner.
- Check the FollowCorridorCode for RobotModel dependence.
- Committed rev. 2112.
- Checked the code with P2AT. Also added green MaxRange circles pointing ahead (quite neat). Revision 2113.
March 17, 2010
- Downloaded nFringe; a UnrealScript language module for Visual Studio (preferable VS2008). Didn't install it yet (follow instructions at UT3 programming forum).
- Updated Tools documentation at UT3 Manual.
- Played with the world generator. Tool creates grid, where you can add rooms from an object library. Additional rooms can be added, although it is not completely clear what the criteria are to be a good 'room'.
- Created map didn't had a starting spot. Loaded Maze.upk and Mod2x3\RampRoom.t3d. Finally I get some structures, but still no starting spot. Also Mod1x2\playerstarts.t3d didn't had a starting spot.
- Created a DragAndDrop room. Saving map failed (due to mif/mid?). Could Load and save map into Editor. Blocked textures and some unreachable parts (no connecting doors).
- Downloaded Carball mod, to inspect for nice textures.
- CarBall3_Core contains a Goal and SoccerField lines. Only other interesting package are the soccer balls in CarBall3_Ball.
- Found two well formed human females at filefront; KaT and Miyuki.
- Also found a human male at filefront; Solid Snake and Miyuki.
- Found another female models at skincity; Vika, Nyota and Jessica.

- Found the reason why no image was visible. Reason was that I copied an upis-script with uses raw images. In CameraData.Load the copy was switched off due to a conflict with UsarSkinAgent. Commited revision 2111.
March 14, 2010
- With MAP_RESOLUTION set to 10 the performance is much better. When Backing up no control of map.
- Works now quite fine. Should try to redraw also with 0,0 and drive further than -0.1, 40.4, 0.7.
March 12, 2010
- Experimented with TeleOperation world.
- Map is far behind (should check the performance with 2009/competition). Could also try to reduce the drawing precision. Should check the many Rescaling 0.0. Out of battery.
- Changed Map_Resolution from 15 to 90.
- ReadInPoints is called multiple times. First time from NotesLayer.New from Agent.ManifoldImage.New (OnLoad 34).
- ReadInPoints is called twice. Second time from NotesLayer.New from ManifoldImage.New from TeamController.New.
- ReadInPoints is called three times. Third time from UsarAgent.New, ... Agent.WorldView.New, Agent.WorldView.CreateManifoldImage.
- Could check if the TeamController could share the ManifoldImage of the MapController.
- TeamController's ManifoldImage is never used. Can be removed.
- MapController and Agent should have different number of layers. InitializeLayers adds them all, Draw draws them all.
- LaserScanner receives Geometry values twice. Strange enough, this seems not requested. Second call is from TiltedScanner. No longer mount TiltedScanner for P2AT.
- Lost control of the robot while Backing up. Removed writing path to victims (Path-planning should not be done while backing up)
- Increased MAP_RESOLUTION to 900.
- A lot of problems with not initialized ManifoldImage.
- Crash maybe due to changed TeamController.Designer
- Maybe the backup should also ask a ReaderLock for the ManifoldImage.
March 11, 2010
- Tried to start DM-spqrSoccer2006_V3. Gave start screen the license number and game to the main menu. Started a deadmatch, and could select DM-spqrSoccer2006_V3. Program crashed on failed to load 'World DM-spqrSoccer2006_V3.TheWorld'.
- TestGroundVehicle1 is still working. Made a new USARSimRunMap from this example. Still the CD-Key requested. Will mail Sander.
- Tried to start DM-Mapping on u015305, but this fails. Also UnRealEditor has problems:
Bad expr token 3f
History: SerializeExpr <- (3F) <- SerializeExpr <- (80) <- UStruct::Serialize <- (Class myLevel.FalseAlarmVolume21) <- UState::Serialize <- UClass::Serialize <- (Class myLevel.FalseAlarmVolume21) <- LoadObject <- (Class myLevel.FalseAlarmVolume21 10595506==10595506/14182258 10595469 161) <- ULinkerLoad::Preload <- PreLoadObjects <- UObject::EndLoad <- UObject::LoadPackage <- UEditorEngine::Exec_Map <- UEditorEngine::Exec <- (MAP LOAD FILE="C:\UT2004\Maps\DM-Mapping_250.ut2") <- UUnrealEdEngine::Exec <- FileOpen <- WEditorFrame::OnCommand <- WWindow::WndProc <- WWindow::StaticProc <- MessagePump <- MainLoop
And
Assertion failed: Actors(1)->Brush!=NULL [File:c:\ut2004build\ut2-code\engine\inc\UnLevel.h] [Line: 430]
- Same for DM-compWorldDay1_150:
Bad expr token 5a
History: SerializeExpr <- (5A) <- SerializeExpr <- (81) <- UStruct::Serialize <- (Class myLevel.Action_SetAnim9) <- UState::Serialize <- UClass::Serialize <- (Class myLevel.Action_SetAnim9) <- LoadObject <- (Class myLevel.Action_SetAnim9 220055==220055/15367076 220025 5) <- ULinkerLoad::Preload <- PreLoadObjects <- UObject::EndLoad <- UObject::LoadPackage <- UEditorEngine::Exec_Map <- UEditorEngine::Exec <- (MAP LOAD FILE="C:\UT2004\Maps\DM-compWorldDay1_250.ut2") <- UUnrealEdEngine::Exec <- FileOpen <- WEditorFrame::OnCommand <- WWindow::WndProc <- WWindow::StaticProc <- MessagePump <- MainLoop
- Run instead of a map a NomadLog (with WSM and Odometry). This is the result:
March 9, 2010
March 8, 2010
- Downloaded the ported UT3-maps from IUST.
- Factory
- PlywoodCornerMaze
- SpqrSoccer2006
- TestValidationRooms
- RoboCup09Practice
- Created a USARSimRunMap script, but unfortunally I get a window which requests the UT3 license key. Sander had the same problem with the SmokeMap.
March 2, 2010
- Downloaded SequoiaView on pc-unreal to find 1.6 Gb for Matlab installation.
February 28, 2010
- Testing the merge of competition with experimental. The GUI was working, but some buttons were gone. Repaired TeamConfig, but again an error in InitializeComponent.
- GetStartPoses button is back, but MapLabel is missing (and BackUpFrequency box.
February 23, 2010
- Did some initial test with the new revision of the MazeGenerator. Yellow with 10 degree inclination is already too much inclination for the robot. The robot seems to be too light and tops easily. Unfortunatelly, the collosion frame of the bumbers are nonsense, and the robot gets stuck:
- Also tried an inclination of 5 degrees. Didn't see much difference. Also this challenge is too much (steps half the size of the wheels, and the P3AT cannot use those wheels due to the huge bumper in front of the wheels). Three squares are reachable, but the physical behavior of the robot is not adequate. Collisions seem to repel the robot, who teleports back decimeters after a tiny bumb. Ended up on my front wheels. Try to collide with the wall, but wasn't able to get upright again.
- Conclusion, somebody has to give a serious look at the collision framework of the robot. This sort of physics is not realistic, making UsarSim unusable for the competition.
February 22, 2010
February 21, 2010
- Tested rev. 268. Quite nice behavior, although not precisely turn on place, but near enough. When left alone, the robot slowly drifts. When turning, it is not always along the same center. The reason that this is not a problem, is because in the close encounters of the maze, turning is sometimes prevented by the walls. Because the collision frames are not accurate, turning is sometimes not possible although there is still clearance. To prevent this, you have to try escape the wall by going forward/backward. Compared to this, the remaining problems are minor.
Was able for the first time to maneouver most of the maze (crashed Unreal before its time).
February 19, 2010
- Inspected all changes on P3AT.uc. MaxSpeed is no longer set (default from SVehicle=2500). All MotorTorques of the SVehicleWheel are set to zero. That is initialization, because Steer, MotorTorque, BrakeTorque and ChassisTorque are the four variables that are set each tick.
- Behzad found that using the clamped friction mode improved the turning behavior.
- Read the game developers discussion about the Pacejka Formula which used for the wheel dynamics. They say that slip angle of the wheel, along with camber and load. The slipangle = atan2(longtitude wheel speed, lateral wheel speed).
- Checked Behzad's logbook.
-
- Started branch 2010/competition.
- Merged with 2009/honours rev. 1950 (Constrained TeleOp AirRobot). Didn't merge with later versions (Autonomous Exploration AirRobot), because the sonar-data is included to the Patches (first check this version with a ground vehicle).
- Merged with experimental. Merge compiled, but running resulted in an error for the TeamConfigDialog. Merged the Dialog directory with assistance. Now the TeamConfigDialog works, although the button and label StartPoses is gone . The backup seconds are not saved. The config for the RoboCup2009outdoor world is called agentconfig.cfg, in Desktop\AOJRF_QuickLaunch.
February 18, 2010
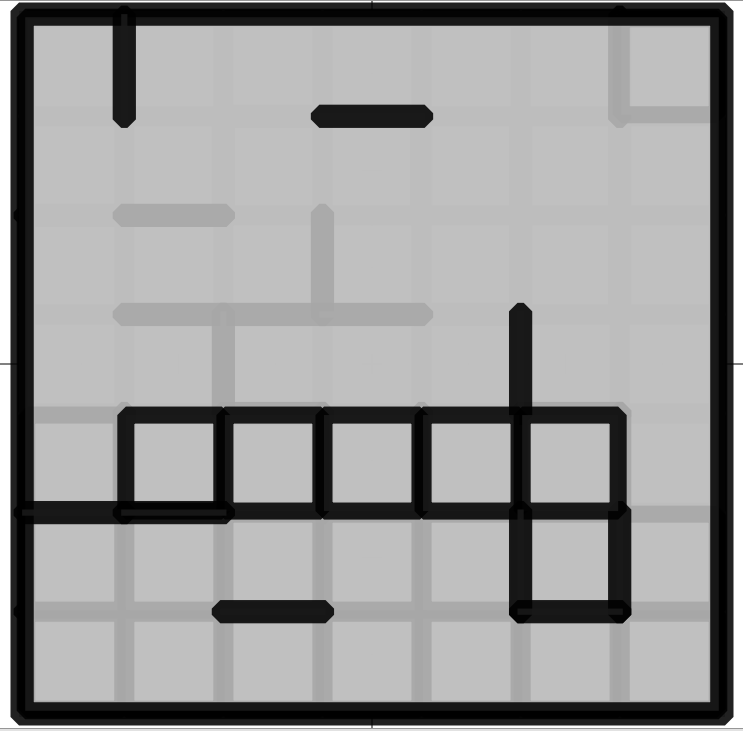
- Made a new map, Maze7x7Yellow10. When creating this map, it is essential to specify also the extention .t3d, *.mif and *.mid to files when asked by MazeGener (otherwise the three files overwrite each other). Further, when you specify to Unreal Editor to save the file in D:\Games\Unreal Tournament 3\usarsim\Unpublished\USARSimMaps, it saves the file in c:\WINNT\profiles\robolab\My Documents\My Games\Unreal Tournament 3\usarsim\Unpublished\USARSimMaps anyway.
- Explored the map from StartPose Robot_0 (-3.264,-3.264,0.7040). Changed the orientation to +1.517, so that the robot is looking into the corridor.
No ramps found. While inspecting the corresponding mif files which indicate the location of the ramps, the P3AT started jumping (see the the server logfile, no problems reported).
- Could not import in the Maze7x7Yellow10.mif file in OpenEV (file format not supported), but open works (just get the grid). Could also read in the mif-file with GeoTiffViewer. With GeoTiffViewer you can change the intensity, and see the difference between black and gray. Still, the information was not that informative.
Started at lower left corner.
- Also gdalinfo.exe could not recognize the file format, which logical because it is not a gdal file. ogrinfo reported that there is a single layer inside the mif-file. Inspection of the data in the mid file shows that all regions where calssified as "Room - Outer Walls".
- Created Maze7x7Orange, and explored the map from the same StartPose.
Still, no ramps to be seen. According to Steve, they are below the ground. Bug will be repaired.
- Checked CarBall3. No code, but Published\CarBall3_Vehicles.upk could have some nice textures.
February 17, 2010
- According to Behzad, the command is give to drive to the right. Put debug-messages in my StandardDriveActor.
- [CorridorWalk] NorthEast looks promising -> Move(0.40,-0.20).
- [CorridorWalk] NorthNorthEast looks promising -> Move(0.60,-0.10).
- [CorridorWalk] North look promising -> Move(0.60,+0.30).
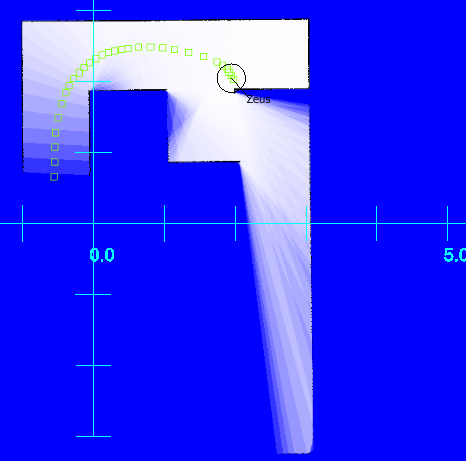
This last statement is wrong (should be Move(0.80,0.0)). Found the bug in CorridorWalk (rev. 2103), and the result looks much better:
The CorridorWalk motion has some difficulties with chosing which corridor to take, and ends up against the doorpost marking the T-junction. The other motions (Retreat, FrontierSelection) should be able to solve this problem. Yet, that is our problems, not of the PID-control of the Move-commands.
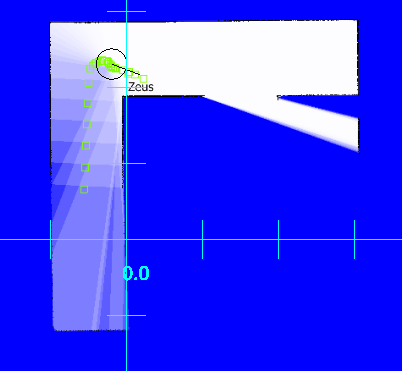
- Behzad fixed the torque-bug for turning. Same experiment, now against rev. 266 of USARSim:
The turning seems to be a bit slower than before, but still quite smoothly. CorridorWalk is nearly able to pass the doorway (maybe I should add a Turn in place for the East and West direction).
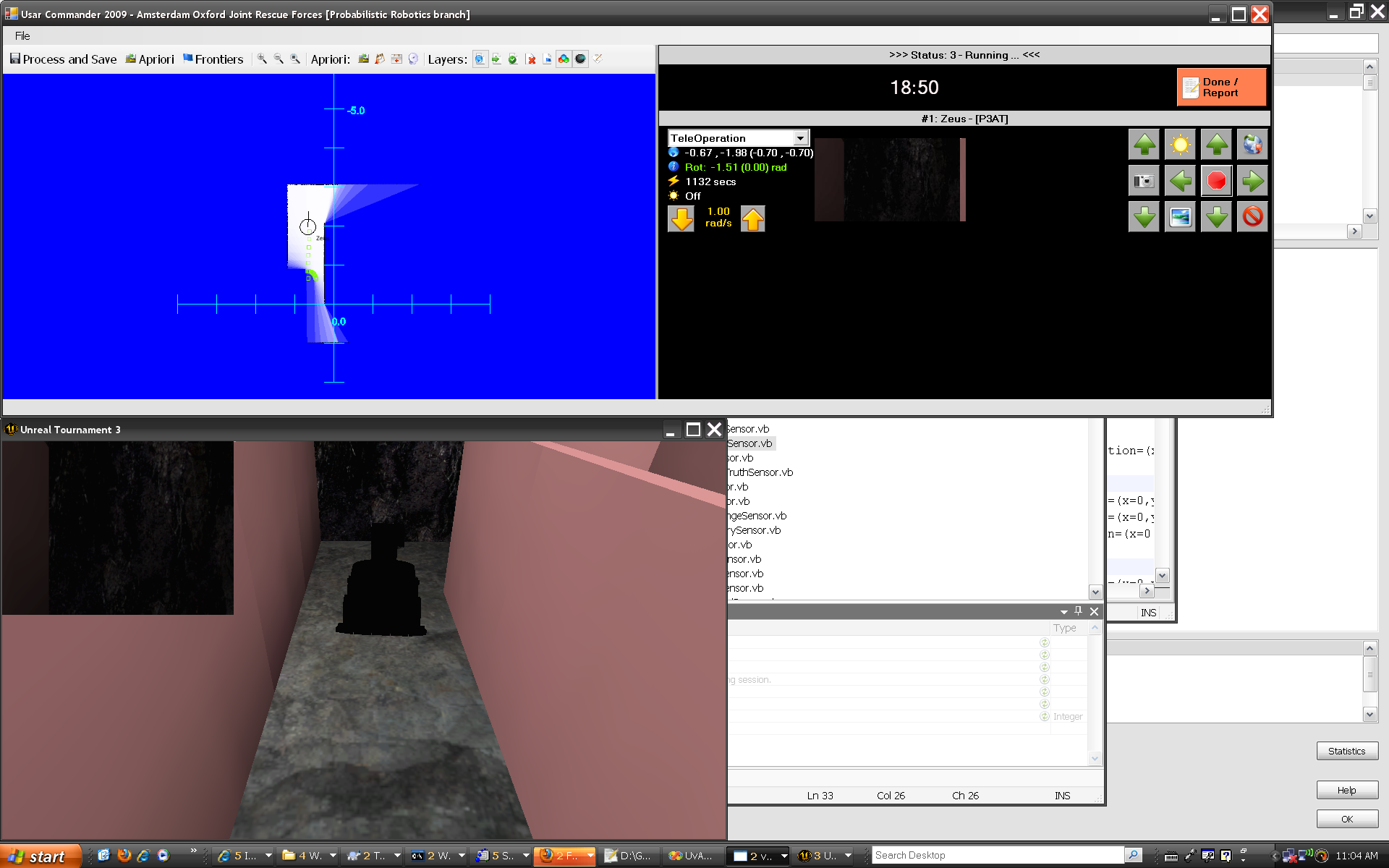
- Repeated the experiment with TeleOperation. Here we Drive straigth or Turn in place. Turning is really slow and shacky.
Behzad should check thethe client logfile and the the server logfile.
February 14, 2010
- Tested new control implemented by Behzad. The sluggenesh is gone, I had to reduce the speed to 1 m/s.
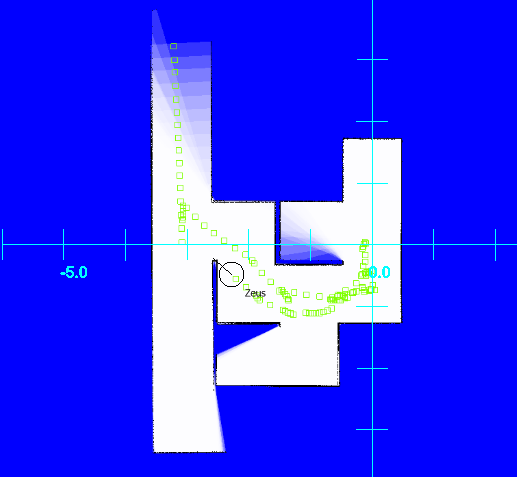
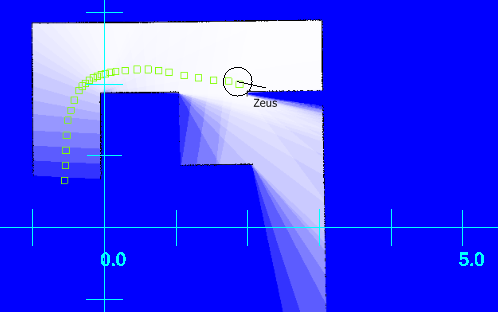
- Had to modify some code (assistance rev. 2101), due the missing view in the status messages and the new names of the encoders. Deadreckoning on encoders didn't work (no PoseUpdates to render the map). ScanMatching without seed gave the following result:
- Also did AutonomousExploration test. First CorridorWalk is chosen, but the robot gets stuck on the wall at the other side. After timeout RandomWalk is chosen. North looks promising, but no movement (a lot of hoping at the beginning, do we give too many commands?). Time out tries to find frontiers, but none is found is this small maze. Should try same experiment in competition code.
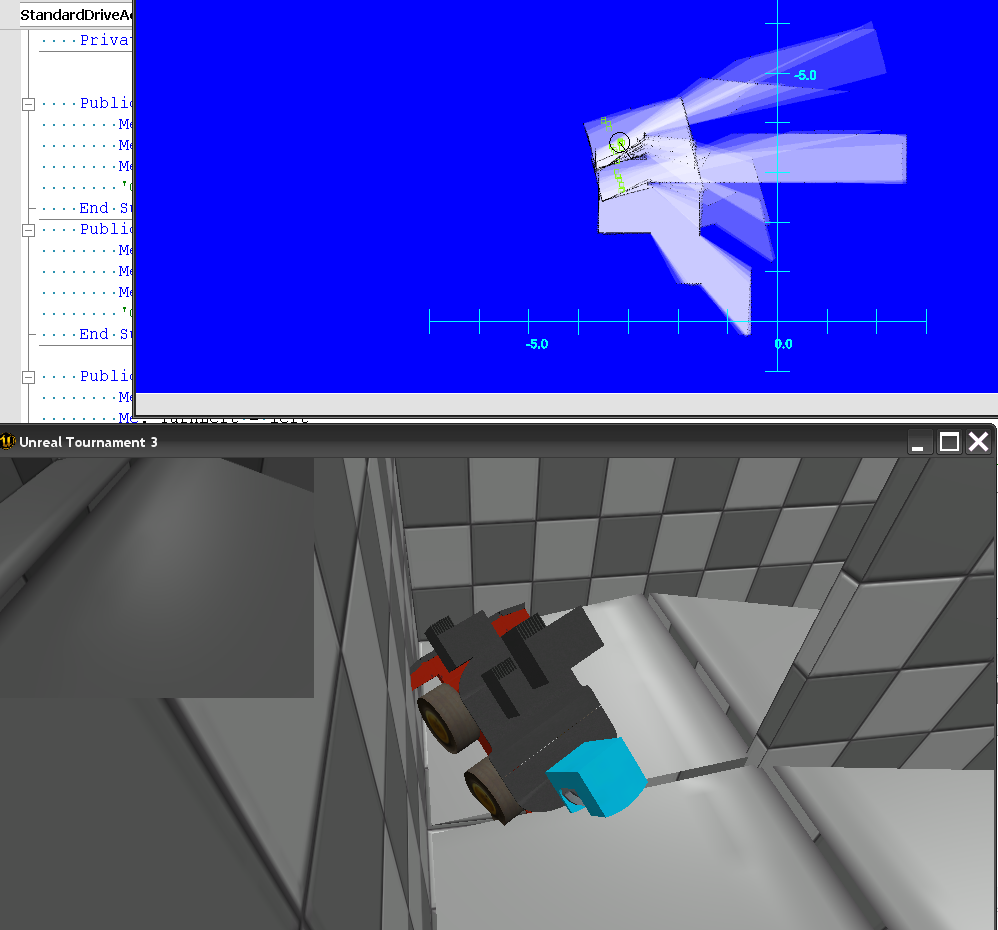
- While testing with improved CorridorWalk, I got the following screenshot of a strange collision. Is the Sick now pulled from the P3AT?
 .
.
- Further tested improved CorridorWalk. Strange enough, did the run twice, and the robot turn left (West), while there is no indication of West in my log. Is this an overcompensation of previous turn?
 .
.
February 9, 2010
- Still working on RealisticSmoke paper. Tried to run DM-RoboCUp2009Outdoor2 on u015305, but Unreal Editor while loading BenTropical (on Action_SetAnim9).
January 26, 2010
- Rerun the Final 2009 outdoor with two robots (spawn from commander). Was able to find one more victims as Julian, by directing the kenaf from the river-bank up to street level (used the AirRobot as god's eye). My benefit was a direct connection, but Julian had one additional Kenaf and AirRobot & the top-camera instead of the front camera of the Kenaf:
- VictimZone-0, 20.05, -29.27, 0, VSENSOR
- VictimZone-1, 23.18, -24.59, 0, VSENSOR
- VictimZone-2, 25.23, -31.06, 0, VSENSOR
- VictimZone-3, 27.18, -37.55, 0, VSENSOR
- VictimZone-4, 17.89, -30.02, 0, VSENSOR
- VictimZone-5, 28.34, -27.92, 0, VSENSOR
- VictimZone-6, 32.51, -31.65, 0, VSENSOR
Watch the difference between the maps. My map was quite bad, due to initial turning to find the first two victims (should turn slower):

Unfortunatelly, the camera-button didn't seem to work (pushed it at least five times), so I don't have victim recordings.
- Martijn Neef promised to provide a 3D-model of the BOCAS site.
January 22, 2010
January 20, 2010
- Received access to the dataset of Portugal.
January 19, 2010
- Unpacked the images of dataset 33 after a two day download. Not enough space on faro, so I unpacked at emicro. Emicro is a 64-bits machine without softpkg installed. Added /usr/bin to my path. The directory with Images is 10Gb. The textfile with the names is a link, so I should recreate this file from a dir command. The filenames are created with unix-seconds -0 milliseconds.
January 15, 2010
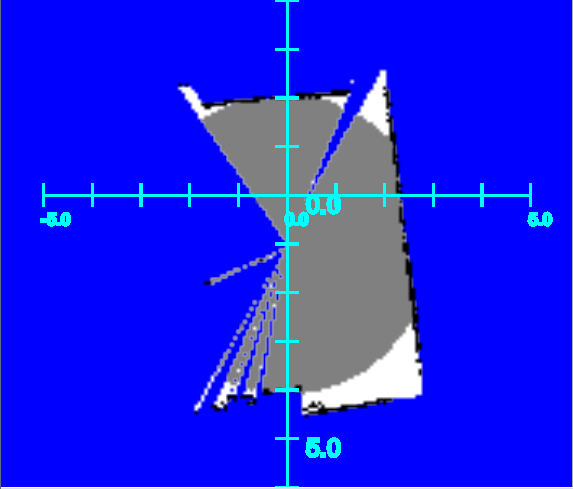
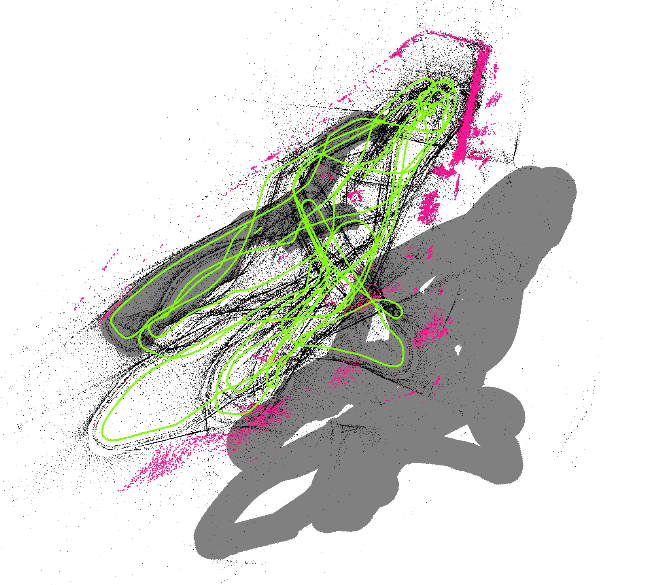
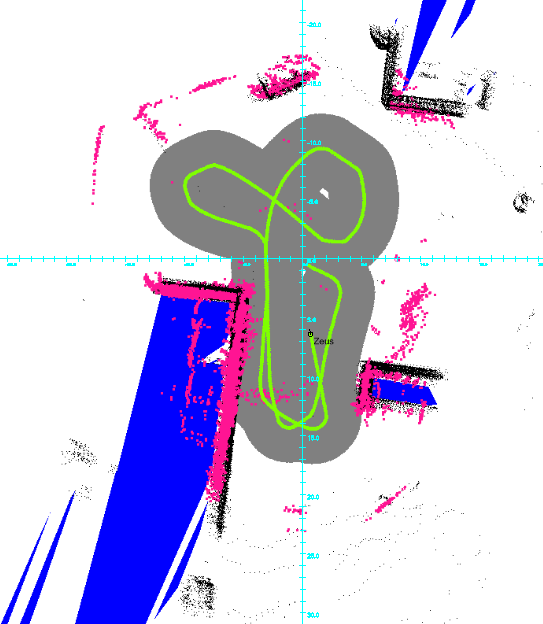
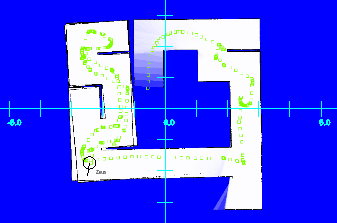
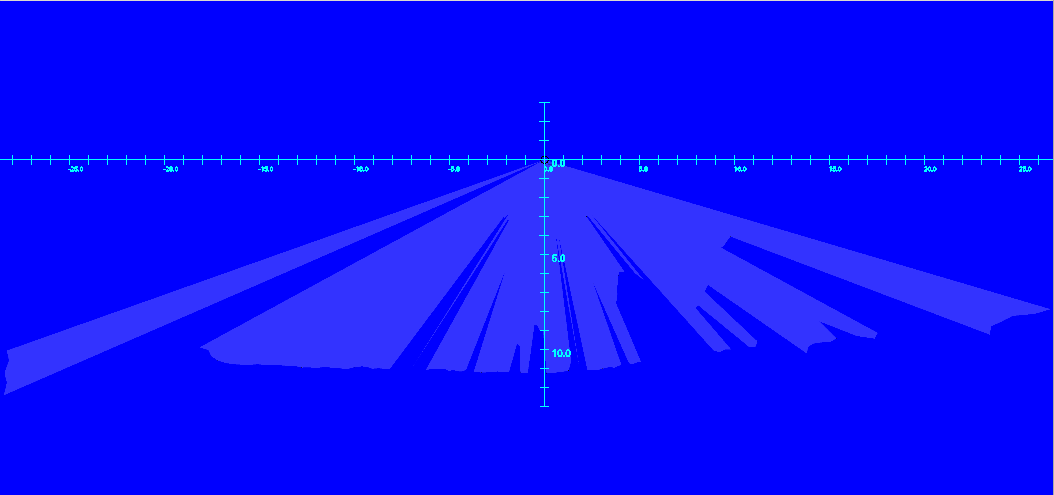
- Solved the initialisation bug. The bug was located in the new CurrentPoseEstimates. This bug is repaired in GroundTruth, but not (yet) for the other sensors. Committed revision 2099. This could also solve the 600000m from the Equator-bug (checked: no). The result is quite good, both with DeadReckoning and ScanMatching (WSM). Maybe some extra range could help.
- Both the Agent and the Free space are drawn to two meters to the right of the obstacles and robot path. With MaxRange 64m the BufferedLayer complains in line 61 baout a non valid Parameter. After 460 patches an System.StackOverflow in QuadTree. The path looks quite good, although twice a jump of 20cm (each wall has multiple layers, so the path jumps from one layer to another).
January 14, 2010
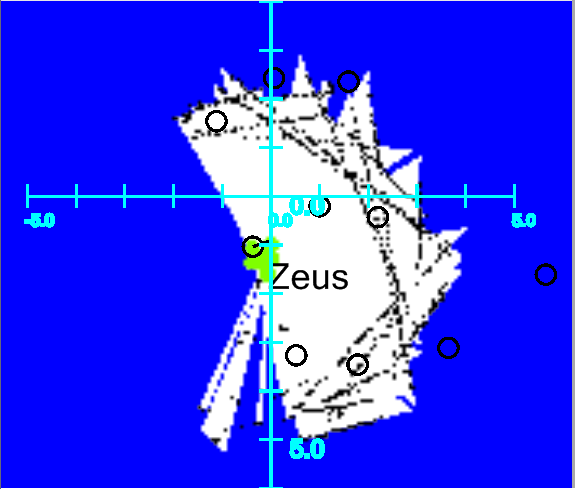
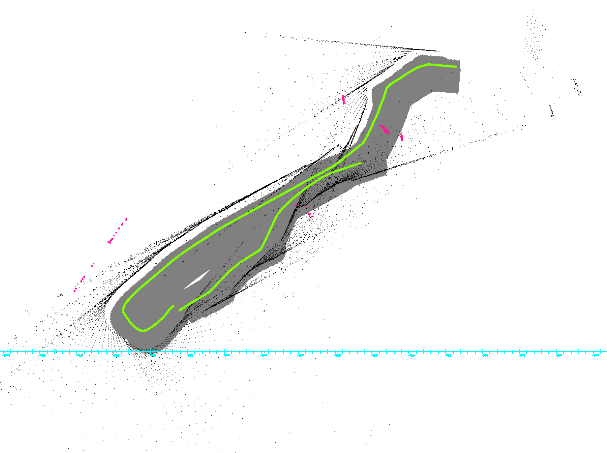
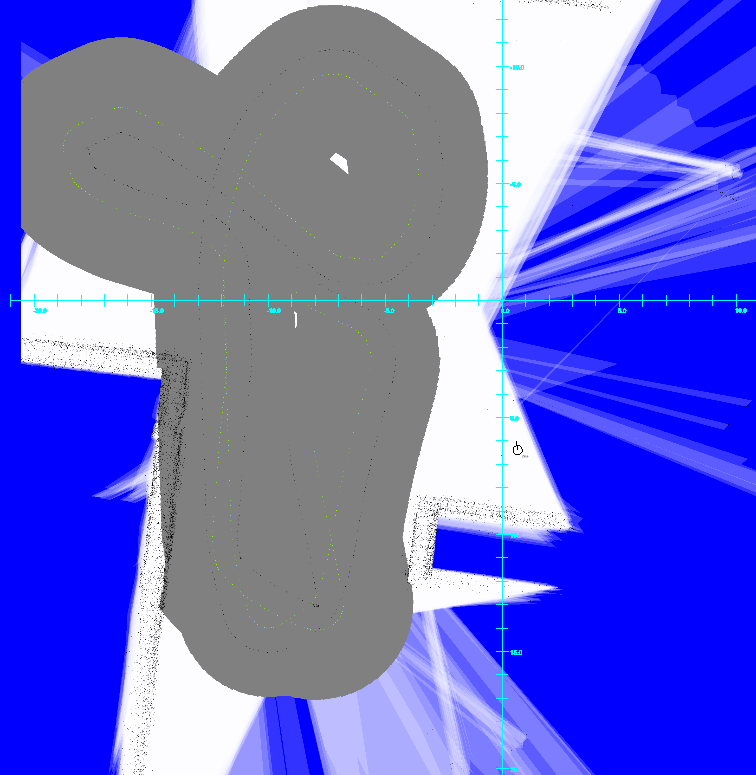
- The LaserHorizontal is pointing down, hitting the ground 11 meters in front of the robot. In the Dam area not many features are available in that range. Changed to the House area (dataset 33.
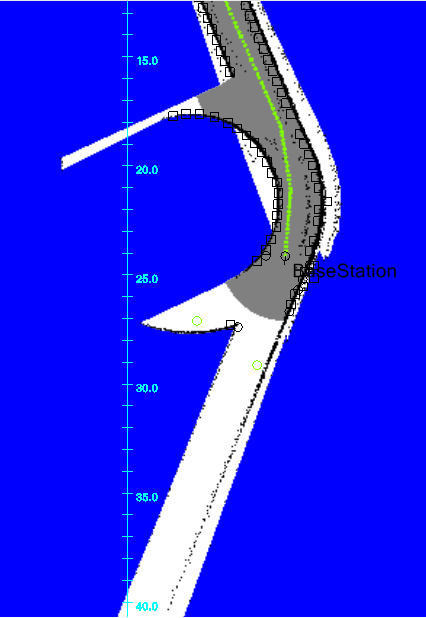
- Using the level LaserStarboard improved the results a lot. With MaxRange on 32m the straight walls of the houses are easily found. Extending the MaxRange to 81m was a bit too much. Trying 48m.
- Still, a seed for the localization could help.
- Implemented a GroundTruth with an offset. Seems to work fine, but BufferedLayer of the assistance branch is quite instable.
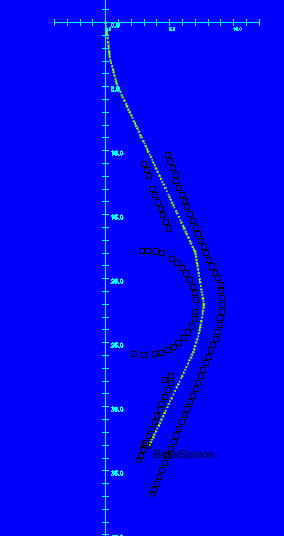
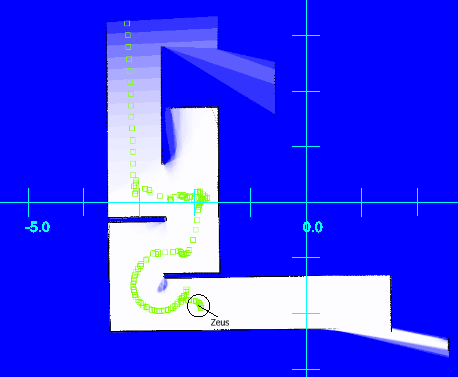
- The Safe space shows the robot path (reverted the AgentsLayer), but with a very fine resolution. There is a 7 meter shift between the patch position and the Agent position!. This record was made deadreckoning with Nav-data. Further note that the walls are one meter thick (noise of Nav system!), and that constantly a pole is visible to the left of the LaserStarboard. Should restrict the FOV, by removing the last four readings (always 104-108). Solved it by raising the MinRange to 1.1m. The first patch is registered with a wrong orientation. This also solves the 7m shift.
- Started with wrong start_orientation. Still, the first patch gets a wrong orientation. To be solved tomorrow. Committed revision 2098.
January 13, 2010
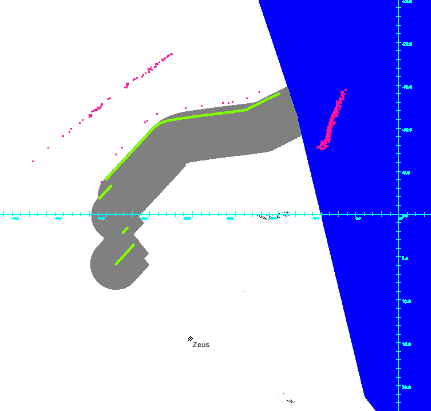
- Wrote the code to read LaserHorizontal from Marulan dataset (assistance branch revision: 2096). Result is a single rangescan (robot is static in experiment 14).
- Added Nav data from Marulan dataset as GroundTruth. Yet, it is an estimate from the GPS, and the values seem to be the distance to the Equator. Using this information blows up the scaling of the images.
- Try tomorrow the House area.
January 12, 2010
- At the training center at Schiphol (Bocas) all possible fire scenario can be recreated. Tried to connect Jan Dirk van de Ven.
- The article indicated by Nathan Brooks, gives a link to the Marulan datasets, including a sessions with dust, smoke and rain.
January 8, 2010
- Read article found by Okke about validation laser range scanners. Both the Sick LMS-200 and Hokuyo URG-04LX are tested. Observations:
- The Sick needs 2 hours to warm up. While heating up from 20 to 26 degrees, discrete corrections are made (~ for every 0.1 degree). The result is a zig-zag pattern with steps of 1% (2 cm on a distance of 2m). The Hokuyo needs 40 minutes to warm up, d the range measurement show a slow increase with the temperature (nearly 1% at the end, but no discontinueties).
- They varied the surface of the detected object. Target color didn't effect the measurements. Reflectivity did, but only minor (for instance 3cm extra on 2m distance for an Hokuyo detecting a mirror). The only exception was Black Velvet.
- The measured distance increased by 1% when the target was rotated 60 degrees (nearly linear dependence).
- The reaction on smoke. A small fog (10% reduced visibility) didn't effect both scanners. The Sick showed a reproducable behavior for heavy smoke. The range measurement was reduced equivalent to the reduction of visibility (a 10cm measurement when the room was full of smoke). When the smoke was allowed the leave the room, the measurements increased accordingly. The Sick showed a sort of penegration grade. The Hokuyo gave more or less random MIN or MAX range messages when there was to much smoke (more than 20% reduced visibility).
- When the target was fully heated, the SICK couldn't measure the target anymore (MAX range message).
January 4, 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004
Formatting Help?
