Wishlist
- The WindowsAPI gives direct access to the new Windows 7 libraries, including Windows Imaging Component (WIC) APIs. It seems that the new GDI libraries are 30% faster. To be seen if the new GDI libraries are part of this new WindowsAPI code pack.
- Learning of optimal search strategies (in progress)
as/>study finished)
- Coupling with Nomad (accomplished, to be tested)
- 3D user-interface (open)
- Traversibility estimate from stereo vision (open)
itching.pdf>open
- 3D-Mapping (open
- Joint Rescue Forces list of tasks
- small tasks
- Reconnect when in range
- Use status message to select view.
Started
Labbook 2012.
December 21, 2011
- Tried to install UDK-Nov-2011 version on U305, but there was not enough space left on my D-Disk. This actually one version higher than the version indicated in the Installation Instructions.
- Couldn't use TortoiseGit on nb-udk, so I installed MySysGit 1.7.8. Also had to add this directory to the TortoiseGit settings.
November 30, 2011
- Read the article 'Computing Without Processors'.
November 29, 2011
- Tried to apply the second diff with mpatch. Get an error:
(arnoud@sparta) mpatch -a < IJRR_draft2.diff
file bibliography.bib already exists
1 out of 1 hunk FAILED -- saving rejects to file bibliography.bib.rej
IndexError: list index out of range
- Same error if I try it with an alternative command:
mpatch -a ijrr2011.tex IJRR_draft2.diff
file ijrr2011.tex already exists
IndexError: list index out of range
- I replaced the missing figures with stubs and commented out the tikz-package. I have now a working version of the article.
November 28, 2011
- Finding a HDMI 1.4 to VGA or a mini DisplayPort to VGA is not easy. Found something from StarTech.
November 24, 2011
- The Dell XPS15z recognizes its adapter, and directly the Windows Performance Index is much better (6.6 limited by the graphics card). Installing the latest Nvidia drivers dropped the performance to 6.3.
- Installed TortoiseGit. The gui didn't want to start up, but renaming tgit.exe to git.exe solved this issue. Couldn't clone usarsim, because TortoiseGit is missing templates. Will try to perform the action with cygwin. This seems to work.
- Downloaded Sander's trunk. Build of usarnaoqi fails on missing WindowsSDK and NaoQiSKD. Downloaded Windows7 SDK.
November 23, 2011
- The new laptop (a Dell XPS15z) has arrived. Expectations were a bit too high. Classifying the laptop with Windows Performance Index only gave me a 3.4 (limited by the processor). I would have expected more from a Core i7-2640m @ 2.8 GHz. Maybe this was due to a EnerySavings scheme (the adapter is not recognized)!
- The FAQ suggested to reset the adapter 20 seconds, remove the battery. If the warning still comes without battery, an BIOS update is suggested.
- The location to make a Recovery DVD was a bit difficult to find. The Dell Support Center redirected me to Dell DataSafe Local. The option diskettes actually asks for a DVD (not a CD, or diskettes).
- No empty DVD, so Recovery has to be made later. Found Driver page for XPS15z, but not (yet) an app that checks it automatically. First did a Windows update. Intel's update page was down ?!
- Installed cygwin (default packages). Minntty complains that it can load the icon from /Cygwin-Terminal.ico. This icon is on the default location (C:\cygwin). Installed octave and tried a restart.
November 18, 2011
- Proof-reading the journal version of the Role-Based Multi-Robot Exploration.
Found several interesting recent papers which cited my two Frontier papers:
- J. Butzke and M. Likhachev, "Planning for multi-robot explorations with multiple objective utility functions", IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), pp. 3254-3259, September 2011. doi: 10.1109/IROS.2011.6048764 .
- P. Robbel, D. Demirdjian and C. Breazeal, "Simultaneous Localization and Mapping with People", Advanced Reasoning with Depth Cameras Workshop, Robotics Science and Systems conference, June 27, 2011. pdf .
- F. Amigoni and N. Basilico (2010), "A Decision-Theoretic Framework to Select Effective Observation Locations in Robotic Search and Rescue Scenarios", IEEE International Conference on Robotics and Automation (ICRA2010) Workshop on Search and Pursuit/Evasion in the Physical World. pdf .
- Installed Mercurial on cygwin on pc-unreal. This version is python based. Python2.6 is missing the gettext module. On sparta "hg init IJRR2011" works fine, "hg add", "hg commit" also work, "hg import changesJDH.diff" fails. According to the wiki this is due to a difference in versions. Their advice is to apply the changes manually.
- Downloaded mpatch. Changes seems to be automatically solved (had to remove some stuff from the beginning of the file, could be old stuff).
November 17, 2011
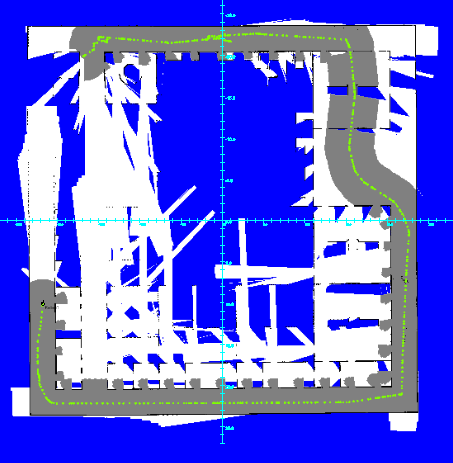
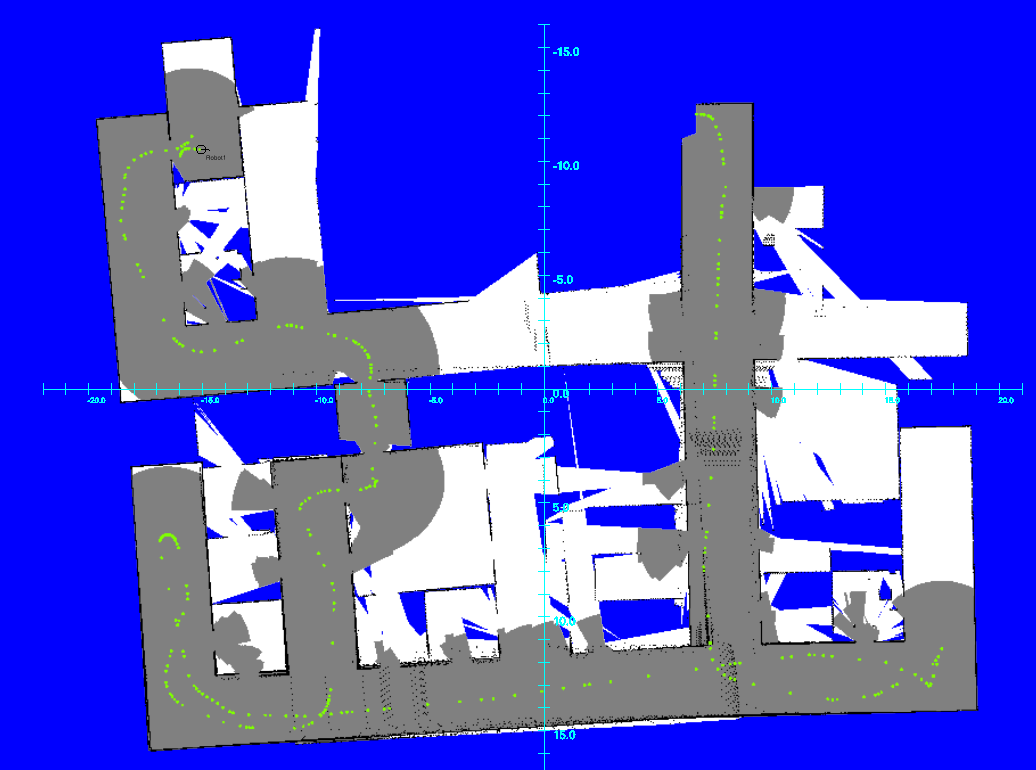
- Searching for a movie in the SensorModel presentation of Probabilistic Robotics, I encountered a new collection of datasets. The first result was not that good, but this was partly due because the odometry data were incremental (while I used them absolute). The second run (WSM) is much better, although after 6 meter a jump of nearly a meter is visible in the path (and before that the side wall and pilars are registered double). Same behavior is visible for ICP (even registered triple):
- Also tried IDC (same jump after 9 meters), yet it seems that the thresholds of the SLAM are too strict (too early expand instead of localize). QuadWSM is even worse (starting to Insert Nan values). QuadICP does it better than QuadWSM, although some double registrations occur (less than 200 correspondes is a bad sign!).
- Oldest version of the VisualBasic code seems to be the UvA Rescue branch (rev. 252, June 28, 2006). I have good results on (rev. 724, July 25, 2007).
- Constants before rev. 800 (ManifoldSlam last revised on rev. 767).
- MATCH_MAXTRANSLATION = 20 'mm (The MATCH constants were introduced in rev. 647).
- MATCH_MAXROTATION = 2 'degrees
- EXTEND_MAXTRANSLATION = 50 (rev. 723 = 200) 'mm
- EXTEND_MAXROTATION = 5 'degrees (The EXTEND constants were introduced in rev. 606).
- Checked the current version of the VisualBasic code (rev 2248, October 7, 2011).
- Constants until rev. 1700 (experiment-branch created from edu-branch). 767).
- MATCH_MAXTRANSLATION = 20 'mm
- MATCH_MAXROTATION = 2 (rev. 2176 = 4.5) 'degrees
- EXTEND_MAXTRANSLATION = 200 'mm
- EXTEND_MAXROTATION = 5 'degrees (rev. 2176 = 45) 'degrees
The change of the rotational threshold was made on 22 July 2010, when I was busy with Sonar calibration in the star-world.
- Version with (4.5 / 45) works much better (for QIDC). Should try (2.0 / 20) and also an increase of the translation (40 / 400).
November 8, 2011
- Was searching for NomadScoutHomeVideo, but 152 didn't want to listen to the mouse or keyboard?! Could login in the robolab with keyboard laying there (altough it looked the same). With the usb-hub keyboard it didn't work (Windows was installing drivers when I finally logged in. Found Gideon's movie.
October 26, 2011
- Ordered the Dell 15z.
- Spent some time to find out how to represent a c with caron: č. A full list of those type of characters (Latin extended A) can be found here. A list of lists can be found here.
- Continued with C:\svn\2010\assistance64bits. Latest project complains that ThirdParty\GDAL-1.8\makegdal80.vcproj is missing.
- Copied from C:\src\gdal-dev-x64\vs2005\gdal the project file makegdal80.vcproj and the source-files from swig\csharp\gdal;ogr;osr. Typed in the VS 2005 x64bits commandline in the directory swig\csharp the command nmake -f makefile.vc GDAL_HOME=C:\svn\assistance64bits\ThirdParty\Release MSVC_VER=1400 install. The file ..\..\nmake.opt was missing. After that the file csharp.opt was missing. Both *_wrap.dll and *_csharp.dll were missing.
- Tried the command nmake -f makefile.vc GDAL_HOME=C:\svn\assistance64bits\ThirdParty\Release MSVC_VER=1400 . gdal_wrap.cpp could not be compiled because cpl_port.h was missing. Added this file (and 7 others). cpl_config.h is a file not part of svn (created from cpl_config.h.in. Added missing files from alg;gcore;ogr;port. Compilation succeeds, linking fails on ogr. Added WIN64 def, without success. Make clean deleted not only the objects, but also the csharp and cpp code.
- Placed the source-code back. Made each subdirectory (gdal, ogr, osr) first, before making in subdirectory csharp. Fails on missing ..\..\gdal_i.lib.
- Looked for the best way to make this lib. Best command seems to be nmake -f makefile.vc GDAL_HOME=C:\svn\assistance64bits\ThirdParty\Release MSVC_VER=1400 WIN64=1 target-lib. Need to make at least port_dir, ogr_dir and core_dir (which are the directories needed for their includes). port_dir made.
October 18, 2011
- Looked at the specs of the Dell 15z. This laptop has a dual core, while the Dell 15 has a quadcore. According to an review, the performance for a single core task is the same, but for performance physics the difference is nearly 40%. Also the graphics card is less (GTX525 vs GT540), which cost a few procent. The Alienware 14x has a GTX555, which is nearly twice as fast.
- Nice alternative is the Razor Blade, which is a 17inch and thin (3kg).
October 7, 2011
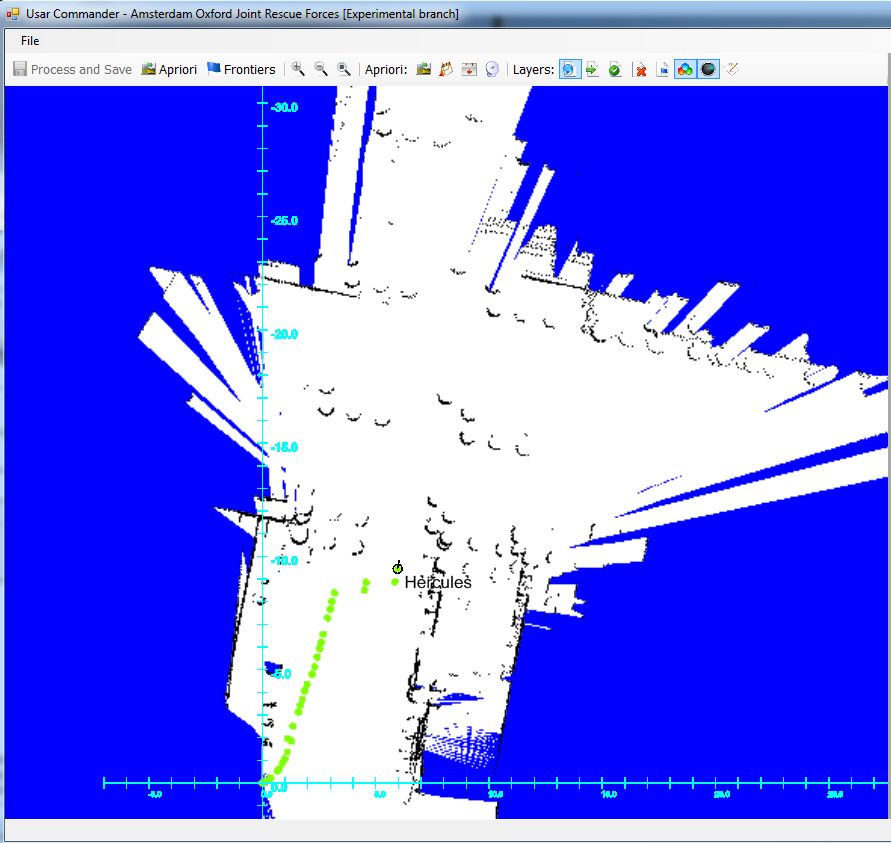
- Looked at the logfile I received from Sander's experiment with the WalkingNao. Logfile is correctly read if NomadWithHokuyo is specified as format. Should just render this data when no position updates are given. The Nomad-proxy didn't receive the messages because they were augmented with the wrong name. Now I see something moving:

- Added an option fixed to ManifoldSlam, which just renders every measurement from the initial position. The circle of the Nao walking is drawn straight in front of the Nomad:

- Analyzed the data. Between measurement 154 and 188 I expect measurements (-0.2 .. 0.2 rad). I see several measurements around 1.2m, but also 0 and MaxRange in between. Typically the Nao is 13 measurements wide. Sander himself is also visible as walking object.
September 26, 2011
- Dowloaded version 2.0.4 from SWIG. Building the tool from the sources is possible, but only a configure is provided. There are example solution-files available in the C#-example, which could be used to build the tool (by adding its sources to the project).
- Adding those files to an empty project is not that simple. Swig.h is missing the file swigconfig.h (probably created with configure). Tried to configure from cygwin (had to add gcc-package to my cygwin configuration).
- Found a swigconfig.h (is generated by config), modified it and added Source/Include, Source/DOH and Source/CParse to Include path. Build fails now on missing entry point (no main function!).
- Did configure --without-pcre from cygwin commandline. Make just combines the objects from directories CParse, DOH, Modules, Preprocessor and Swig. The main can be found in modules. Made my own Modules.exe, which seems to work.
- Rebuild also the Release version. Preprocessor needs DOH and Swig, DOH is indepedent, CParse needs Preprocessor, Swig needs DOH and Parse, Modules needs them all.
- The location of swig is defined in SWIG = D:\svn\2010\assistance\ThirdParty\GDAL-1.8\swig\swig.exe. Swig.exe also needs Lib\swig.swg and Lib\csharp\csharp.swg
- nmake fails on OsrPINVOKE (defined twice), which can be traced back to GDAL-1.8\swig\include\osr.i.
- Error doesn't occur with swig-1.3.39. Downloaded source of swig-1.3.40. Also works.
- Looked which part I could commit. From Swig only a small part of Lib is needed (csharp definitions). The directory Third Party should first be renamed before I could redirect a part of GDAL-1.8 to our own side (mainly swig\include\csharp).
- Exported GDAL-osgeo. Only nmake.opt and makegdal80.vcproj are modified. Should look what I should check in. Most important is the line BuildCommandLine="cd $(ProjectDir) && cd .\swig\ && nmake -f makefile.vc GDAL_HOME=$(ProjectDir)\Release MSVC_VER=1400 csharp && cd .\csharp && nmake -f makefile.vc GDAL_HOME=$(ProjectDir)\Release MSVC_VER=1400 install && cd ..\.. && nmake -f makefile.vc GDAL_HOME=$(ProjectDir)\Release MSVC_VER=1400 && nmake -f makefile.vc GDAL_HOME=$(ProjectDir)\Release MSVC_VER=1400 install && copy /Y $(ProjectDir)\$(ConfigurationName)\bin\*.dll D:\svn\2010\assistance\Usar\UsarCommander\bin\Release"
September 22, 2011
- If GDAL_HOME is not defined, the libraries are installed in C:\warmeda\bld. Changed that in $(ProjectDir)\Release. Build fails on ogr_wrap.obj (which is build in swig\php.
- Couldn't do a nmake csharp in swig directory because executable swig.exe was missing (binary is available in SDK, should look if I could the source-code of SWIG-1.3.39).
September 19, 2011
- Downloaded sdk (32bits vs2005) for my workstation. I will check how difficult it is to build the libraries from source-code.
- Followed the instructions of Microsoft Developers Network and created a Makefil
e project. Had to make a quite explicit call d: ; cd d:\src\GDAL\ ; nmake gd
al-build /f Makefile as build command.
- In the gdal-directory also projects for the different versions of Visual Stu
dio is provided (makegdal80 is for VS 2005). Yet, only the make command for gdal
18.dll is provided. Performing the command nmake /f makefile.vc MSVC_VER=140
svn\2010\assistance\Third Party\GDAL-1.8\bin\Debug\gdal. Inside this directory gdal the directory csharp is created. The *.dll of both directories have to be copied into the project-directory (Usar/UsarCommander/bin/Debug) on succesfull build.
- Renamed 2010\Assistance\Third Party directory to ThirdParty (nmake had problems with the space). Had to update many references. Added makegdal80.vcproj, which seems to work. Only have to add the csharp make command at the end of the build.
September 17, 2011
September 16, 2011
- Again had a crash while starting a video in Chrome. In addition, only one Graphics card (and no Physics or 2nd graphics card) is visible. A post on the Nvidia forum suggested that the only remedy is to use Driver Cleaner Pro v1.5 build 15 to remove old drivers. Program seems not longer around (only copycats).
September 14, 2011
- Cleaning up 64 bits version of project (seems also to influence 'Any CPU'). For UsarLIb, there is a problem with an unknown DataTable (although I have all original references).
September 13, 2011
- Installed version 3 of Sander's ImageServer.
- Received the logfile of yesterday's last flight. Format is in yaml:
---
e: 1
t: 2.324000
alt: 212
or: [2561.000000, -2544.000000, 34884.000000]
accel: [-2.614730, 36.819786, -1016.263672]
vel: [0.000000, 0.000000, 0.000000]
---
The first line e: 1 indicates an measurement event. There are also control (0) and frame (2) events. Unfortunatelly, no frames were registered yesterday.
- Added 64bits gdal-1.8 version to 2010/assistance. Had to replace System.dll and other .Net references from C:\Windows\Microsoft.NET\Framework to C:\Windows\Microsoft.NET\Framework64. Still SharpZLib complains about mscore.lib. Couldn't find any direct reference.
Tools starts complaining about ambiguous definitions in the .Net namespace?! Removing the System.dll reference solves this issue.
- The post-build event from UsarCommander copies all libraries from GDAL to the build-directory. Changed this from GDAL-1.6 to GDAL-1.8 (had to change the location of SpatialReference in GeoTiff.vb). Still a crash on same location.
- Adding the non-csharp libraries in the post-build. Now the system continues, but complains about a ContextSwitchDeadlock:

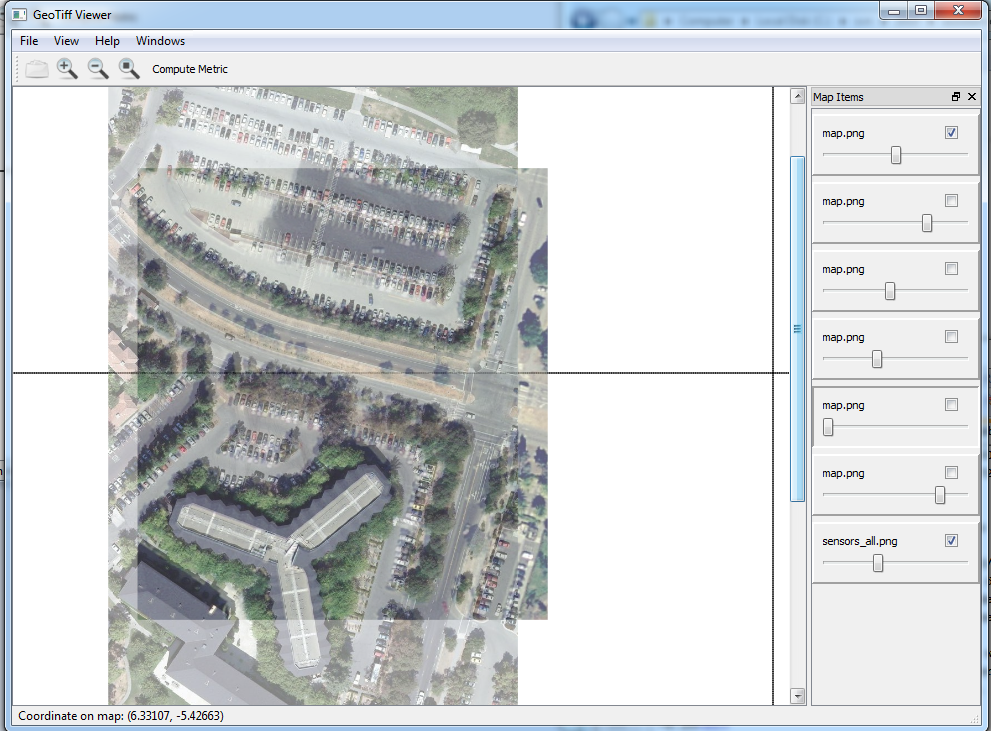
- Also teleoperating over the map goes well. DownButton gives KenafDown action. Map is rotated differently from sensors_all.png.
- Created map.pgw. Map is too low. LowerLeft corner is at (-286, -254). while (-286, -180) should be at lowerleft corner of sensors_all.png (-286, -108). Changed 6th parameter from 92.5 to 170.5. Now the two maps are overlapping (center of building for the map a bit to the upperright of the sensors_all). (-229, -79) vs (-203, -64).
Map a little to the left of the building. (-266.7, -64.1) vs (-254.1,-69.8). Final pgw:
0
-0.25
-0.25
0
-115.5
150
- With the georeferenced map, the map and cameraimages overlap nicely
September 13, 2011
- Solved issue with IMUsensor. IMU is not an option for deadreckoning, because currently it is combined with GPS. Should look if I could use Nick's code to get a position estimate from the speed updates.
- The Kalman filter is at the beginning of Nick's slam.cpp.
- August 27, 2010 I could load sensors_all.png both in the GeoTiffViewer and UsarCommander. In October 15, 2008 I made the last modification (update of GDAL to FWTools 2.6.6.).
Same problem also occurs in 2011/competition code. GeoTiffViewer can load sensors_all.png.
- The gdal libraries for the GeoTiffViewer are from 2007, the gdal_fw library 2010.
- On September 6 I report that flying around in the image works fine. Code seems to be in SimulatedFlyActor. Also found CameraSensor.MoveTo, which is called from Agent.MoveGroundTruth.
- After running setfw.bat, dgalinfo on sensors_all.png works. GeoTiff:Load fails on Gdal.Allregister.
- FWTools seems to be outdated (and 32 bits), downloaded several 64bits distributions from gisinternals.
September 12, 2011
- Started with C:\Games\UDK\UDK-junebeta\Binaries\Win64\UDK.exe " RoboSoccer?game=USARBotAPI.ImageServerGame -log -d3d10", but still the games runs in dx9 (as reported by Sander).
- Tried to start with C:\Games\UDK\UDK-junebeta\Binaries\Win64\UDK.exe " RoboSoccer?game=USARBotAPI.UPISImageServer -log -d3d9", but localhost is not available without network?! At the camping a network is available, but could get no connection (tested with telnet),
both for the 32bits and 64bits variant.
- Switched to 2010/assistance branch, to look at warmup assignment. Added protection against no FlagSensor in VictimsLayer:RenderAgent. Added protection against no AerialOverviewIm in CameraSensor. Tried to load sensors_all.png with Apriori-button,
but GeoTiff gives a Load ERROR. Initial problem was due to wrong config (sensors_all.png on D-disk). Still GeoTiff error remains. In OSGeo4W gdalinfo sensors_all.png gives good information. Loaded sensors_all.png in uDig and saved it as GeoTiff. Also this file cannot be loaded as apriori (no error/warning in SynchronizeStanfordAerialImage, but agent stops)
- Checked for UDK AirRobot different messages:
- msg = "STA {Time 439.6753} {Battery 99999}": both parsed.
- msg = "ASTA {Name cam} {Link 0} {Value -0.0453}": new, not handled yet
- msg = "MISSTA {Time 439.6753} {Name cam} {Link 1} {Value -0.0453} {Torque 0}": MISSTA? is this a bug. Yet, message is handled (didn't check if it was parsed)
September 11, 2011
- Compiled Sander's Easyhook patch of the ImageServer. Had to add June 2010 DirectX SDK directories (Include and Library) to the projects. In addition, I had to add d3d9.lib and d311.lib to the Linker-Input.
- The code of Sander's ImageServer is created in ..\..\Binaries\Win??\UserCode. This Binary directory should be copied into the UDK directory. Still, it seems that ImageServerGame.uc is missing in UsarBotAPI.
- Succesfully made Bas Terwijn's SmartSocket (after installing ant). AbstractLogger still fails on unknown variable MyLoggerFactory (after downloading log4j-1.2.16.jar and adding it to the classpath).
- ImageServerGame.uc is available in the Binary distribution from Sander. Changed imageserver port back from 80 to 5003.
- P3AT in Soccer2006 doesn't seems to have a camera. Tried AirRobot, but here the code fails on the IMUdata (singleStateSensor called with wrong arguments!?). At the end UDK hangs on request stop ImageServer.
- Commented IMUdata out. Still no images (legacy mode?!). Should also handle the ASTA messages from the AirRobot. Could use the P3AT in the RoboCup2011final.
- Could use the AirRobot with UDK 32bits and ImageServer in legacy mode. Added a request when the connection is idle. Now Sander's ImageServer works with UDK 64bits.
September 5, 2011
- Tried all configurations of Pixels, but all wrong colour ( Me._Bitmap.RotateFlip(System.Drawing.RotateFlipType.RotateNoneFlipX) works fine).
August 29, 2011
- Tried other encodings in combination with requesting a bmp image, but same result.
- Looked if I could use the method CControlInterface :: OpenDLLImages of altURI in Upis.
- With two small modifications (#define DLL_EXPORT in server.cpp) I can build Upis 32bits with VS2008. The server has two functions (sendPartialFrame and sendFullFrame), where the local buffer (g_fiImage) is copied into the format of the FreeImage library. In addition, the image is first converted into 24bits format. I shall first try to do that for the requested bmp-image. Yet, bitmap is already PixelFormat.Format24bppRgb.
- Tried to access the IplImage directly, but fails already at m_altHookDLL = LoadLibrary( ALTURI_HOOK_X64 ); Do I miss project-definitions? No, the library should be called without extension!
- Now the calls succeed. When I enable SLAM with the 'S' key the program fails on the rendering (pos not initialized).
- Added some protection. Now I receive Images, although RGB seems in the wrong order. IplImage is actually a OpenCV format. Lets try cvCvtColor(source, destination, CV_BGR2RGB); Doesn't work, OpenCV expects an additional alpha channel (which is not present). Did convertion manually (brg2rgb):
for (int i=0; i< bgrImage->imageSize; i=i+3) {
memcpy_s(&frame->data[5+i],1, &(bgrImage->imageData[i+1]), 1); //Rgb <- .R.
memcpy_s(&frame->data[5+i+1],1, &(bgrImage->imageData[i+2]), 1); //rGb <- .rG
memcpy_s(&frame->data[5+i+2],1, &(bgrImage->imageData[i]), 1); //rgB <- Brg
}
- Looked at the rescue-code again. Image looked as if there was one pixel too much at each row, so made a bitmap of 176x143. Image was upside down, so read the pixels from back to front. Result is much better (although still mirrored and wrong colours):

August 28, 2011
- Reguested a jpg instead of a png. First 4 bytes are questionmarks (ascii 63), and System.IO.MemoryStream(png)).Clone fails.
- Requested a bmp. Now I get some coloured pixels. Yet, scaling seems to be wrong (plus clone crashes after a while (non full buffer ?!). Try again with resolution increased from 176x144 to 640x480. Clone crashes. Changed resolution to 320x240. Still crashing. Adjusted canvas to 176x144, still some coloured pixels.
August 27, 2011
- Wrote a method to get a image from the AltURI webserver. Yet, this is a png-image, which misses the header of 5 bytes with the type and the length. In addition, there is no code (yet) to interpret the png-format. Byte(0)=6 could be used for png.
- According to the specification, a png-file consist of a signature and a number of chunks. Each chunk contains its length, type, data and check. Try if the format can be automatically interpret with DirectCast(New Bitmap(New System.IO.MemoryStream(png)).Clone, Bitmap). Had to change to first byte from 63 to 137 to be interpreted as png. Bitmap is created, but is just black.
- The rational indicates that the first byte is chosen to be non-Ascii by intention. Yet, for a webbrowser this doesn't seem handy. Try a different encoding than current UTF8Encoding. Other encodings don't work, except ASCIIEncoding. Still black.
August 17, 2011
- Installed the 64bits patch for UT2004 from fileplanet.
Get new Splash screen, but according to the ut2004-win64.log I get the following error message:
Critical: Can't find 'intUGUIControllerexecLCDStrLen' in 'XInterface.dll'
- Read the Readme, installed patch 3369, and now DM-Mapping.bat works (64bits uses Direct9 instead of Direct8 drivers). DM-Corridors (which calls upis) still fails on DetourCreateProcessWithDll, as expected.
- Error is not in dll, but in the call EnumProcessModules which only enumerates 32bits processes, while the program is 64bits. Running the 32bits UT2004 fails on Can't find file for package D3D9Drv.
- Try to compile altURI_LoadDLL with PSAPI_VERSION=1, as suggested by Microsoft documentation.
- Doesn't help. Strange enough, when I look at the Configuration manager, the solution platform is x64, but the platform for altURI_LoadDLL is Win32 (and I cannot select x64). Problem was due that the 64bits compiler wasn't installed (on a 64bits system!) by Visual Studio. Installed the compiler and I can select x64 also for the projects.
- Have to define many VC++ directories for x64. Selecting C:\Program Files\Microsoft SDKs\Windows\v7.1\Include as first Include directory gives me d3d11.h, but many errors from ocidl.h. Downloading DX8 SDK suggested by Mark. This version seems to be older than the ones I have already installed (August 2001) and contains no d3d11.h. For Hook WIN32 was defined. Changing this to X64 solved the issue.
- Alternative location of d3d11 could have been C:\Program Files\Microsoft Direct SDK (June 2010)\include.
- Now OpenCV has problems that it can not find the 64bits version of OpenCV2.1. Changed to OpenCV2.3 (which has 64bits libaries). Three libraries are needed: opencv_core230, opencv_highgui230.lib and opencv_imgproc230.lib.
- Hook and LoadDLL can now be made. Ut2004-win64 is now visible for LoadDLL, yet still the process is skipped. Problem was a trailing space. Added a trim-function sProcessName.erase(std::remove_if(sProcessName.begin(), sProcessName.end(), isspace), sProcessName.end());, and finally I can load the dll into UT2004.
- With http://145.18.214.12/image.jpg?h=300&w=400&x=100&y=200&q=50 I get the lower quadrant of UT2004 window in my browser:

August 15, 2011
- Looked at Mark Smith's alternative hook for the image-server, which seems to work for 64bits systems. The provided solution is VC2008. Both the projects Cmd and Hook uses OpenCV2. Added as VC++-directories reference to:
- packages\OpenCV2.3\build\include\opencv
- packages\OpenCV2.3\build\include\
Still missing is the reference to d3d8.h. I have a version of Microsofts DirectX SDK (March 2008), but that version only has d3d9.h and d3d10.h. Seems to be provided by the Summer 2004 version of the DirectX SDK.
- Now the code compiles. Hook complains about a opencv lib, but this is solved by switching to 64bits. Yet, I had to specify for this configuration that the components had to be build and still it skips them all (and StartDebug button not selectable). Solution is to exclude and reload the projects.
- Documentation of Mark's indicate that OpenCV2.0 should be used. The project file of Cmd indicates a reference to C:\OpenCV2.1\lib. Also Hook has a reference (both Include and Lib) towards OpenCV2.1.
- the UI project refers to afxcontrolbars.h, which is provided by VC2010. Seems that the VC2008 equivalent is prereleased in an Extension Feature Pack. This is the x86 version, maybe I need the x64 version.
- Modified start_altURI_UT2004_x64.bat script. World loads fine, but latURI_LoadDLL.exe reports: Unable to load DLL: ...correct path...
- Mark had a UT2004-win64.exe and a USARSim_x64.ini. Last (but not least), he starts the world DM-USAR_Plain1.
August 16, 2011
- Problem with short range of Pique's Hokuyo was due to low powers, see Nao Labbook,
August 10, 2011
- Looked if I could provide ground truth with the Hokuyo mounted on the Scout robot. Hokuyo was disconnected. Looked at 2010 Labbook how to set this expirement up. Updated the experimental branch on pc-unreal. Unfortanetely, nb-zoran is gone (stolen if I remember correctly) and I don't have an account on the nomad-labtop.
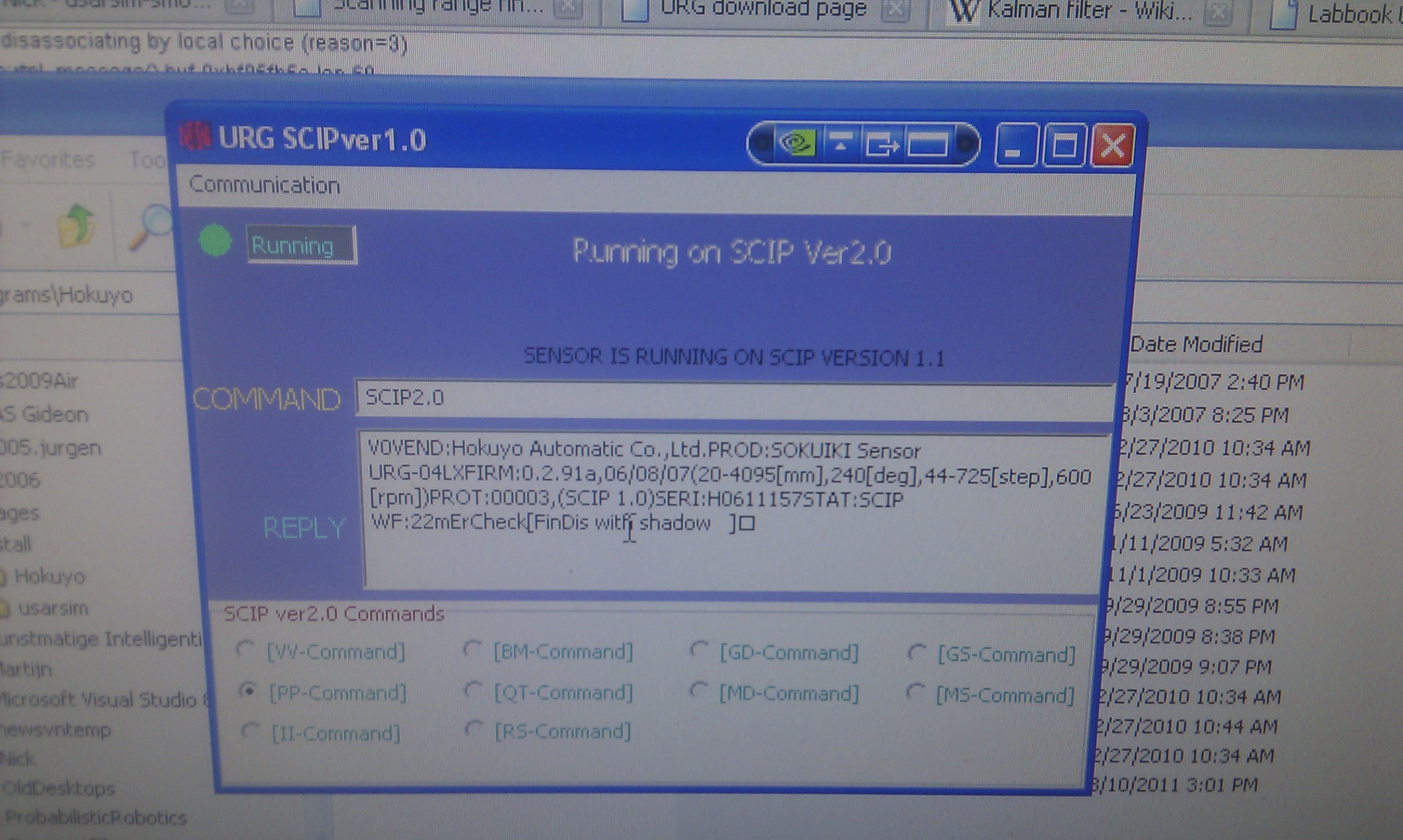
- Connected the Hokuyo directly to pc-unreal with a long usb cable (small-big) from Andy's table in C3.202. Followed Nick's instructions, downloaded USB Driver and SCIP Checking Tool from Hokuyo download page. Hokuyo is not powered by USB, but needs additional 5V connection. After powering up the New Hardware dialog started. Installed SCIP_Command_Test in D:\Programs\Hokuyo. This program temporally changes the interface from SCIP 1.1 to SCIP 2.0. When I use UrgViewer I get two options (COM1 and COM3). Both complain that the baudrate couldn't be set.
- Installed both programs on av-movie. Still couldn't connect via rs232. Also connected via usb. Now SCID_Command_Test could connect (to COM9 with baudrate 115 Kb), still same problem with UrgViewer.
- Connected USB cable to Pique. Now I get range measurements, although only those < 70cm. Changing the range changes the displayed measurement angles, not the max range. Looked at differences between both Hokuyo's. Nomad's reports Firmware 0.2.91a (06/08/07), Pique's Firmware 3.3.00 (16/Apr/2008).

- Couldn't find vmon for SCIP 1.0. (ROS supports SCIP 1.1) protocol.
- Pique is running NaoQi 1.10.10. pc-unreal has also Telepathe 1.10.10, so that fits nicely. The lasermonitor plugin reports that it couldn't get the data out of the cloud. Inspection of the Memory showed that Device/Laser/Value was not there. Rebooted Pique. Now it works. Same behavior as Hokuyo's UrgViewer (only detections < 70 cm).
- Tried to look with URG_Configurer if some of the default settings had changed. Only the SCIP-version, the motor speed and the baud rate (for RS232C) could be set. Configurer is available on well hidden download page, where also the firmware and firmware update tool can be found.
August 3, 2011
- Installed git and git-bashcompletion in cygwin on u305. Checked if git clone git://usarsim.git.sourceforge.net/gitroot/usarsim/usarsim worked.
July 22, 2011
- Run the AirRobot in UT2004 (after applying the patch3369 and the g15patch). Maybe this also solves the Detour problem. A flight with the AirRobot gave this log (note that the UnrealVersion was still on UDK):
INIT {ClassName USARBot.AirRobot} {Name Robot1} {Location -42.01,56.74,-1.69} {Rotation 0.00,0.00,0.00}
NFO {Gametype BotDeathMatch} {Level DM-compWorldDay1_250} {TimeLimit 0}
GETGEO {Type Robot} {Name Robot1}
GETCONF {Type Robot} {Name Robot1}
GEO {Type AerialVehicle} {Name AirRobot} {Dimensions 0.9996,0.9993,0.1938} {COG 0.0021,0.0020,0.1000}
CONF {Type AerialVehicle} {Name AirRobot} {SteeringType RotaryWing} {Mass 50.0000} {MaxAltitudeVelocity 5.0000} {MaxLinearVelocity 5.0000} {MaxLateralVelocity 5.0000} {MaxRotationalVelocity 1.5707}
SEN {Type GPS} {Name GPS} {Fix 0} {Satellites 0}
SEN {Time 546.2296} {Type Sonar} {Name F1 Range 0.6377} {Name F2 Range 4.9953} {Name F3 Range 2.5537} {Name F4 Range 3.4069} {Name F5 Range 5.0000} {Name F6 Range 0.6872}
MISSTA {Time 546.23} {Name CameraPanTilt} {Link 1} {Value 0.0000} {Torque -20.00}
STA {Type AerialVehicle} {Time 546.23} {LightToggle False} {LightIntensity 0} {Battery 780} {View -1}
SEN {Type GroundTruth} {Name GroundTruth} {Location -42.01,56.74,-1.50} {Orientation 0.00,6.28,0.00}
...
GETGEO {Type Sonar} {Name }
GETCONF {Type GPSSensor_FIXED} {Name GPS}
...
GEO {Type Sonar} {Name F1 Location -0.1911,-0.1911,0.0000 Orientation 0.0002,-0.0002,-1.4002 Mount HARD} {Name F2 Location 0.1911,-0.1911,0.0000 Orientation 0.0000,-0.0000,-0.4000 Mount HARD} {Name F3 Location 0.1911,0.1911,-0.0000 Orientation 0.0000,0.0000,0.3996 Mount HARD} {Name F4 Location -0.1911,0.1911,-0.0000 Orientation 0.0002,0.0002,1.3994 Mount HARD} {Name F5 Location 0.0000,-0.0000,-0.1500 Orientation -1.5705,1.5704,-1.5708 Mount HARD} {Name F6 Location 0.0000,0.0000,0.1500 Orientation -1.5705,-1.5704,1.5706 Mount HARD}
CONF {Type GPSSensor_FIXED} {Name GPS}
...
GETGEO {Type GPSSensor_FIXED} {Name GPS}
GEO {Type GPSSensor_FIXED} {Name GPS}
- Changed to UT2004. Now Geo messages are in principal the same:
GETCONF {Type GPSSensor} {Name GPS}
CONF {Type GPSSensor} {Name GPS}
GETGEO {Type GPSSensor} {Name GPS}
GEO {Type GPSSensor} {Name GPS}
- Yet, request for CONF halts after GETCONF {Type GPSSensor} for AirRobot. Modified the code (making use of the UnrealVersion):
CONF {Type Sonar} {Name F1} {MaxRange 5.0000} {MinRange 0.1000} {BeamAngle 0.3491} {Name F2} {MaxRange 5.0000} {MinRange 0.1000} {BeamAngle 0.3491} {Name F3} {MaxRange 5.0000} {MinRange 0.1000} {BeamAngle 0.3491} {Name F4} {MaxRange 5.0000} {MinRange 0.1000} {BeamAngle 0.3491} {Name F5} {MaxRange 5.0000} {MinRange 0.1000} {BeamAngle 0.3491} {Name F6} {MaxRange 5.0000} {MinRange 0.1000} {BeamAngle 0.3491}
- Continued with chain. Now also GETCONF of GroundTruth is asked:
CONF {Type GroundTruth} {Name GroundTruth} {ScanInterval 0.20}
- Copied the chain to GETGEO:
GEO {Type GroundTruth} {Name GroundTruth Location 0.0000,0.0000,0.0000 Orientation -0.0000,-0.0001,0.0000 Mount HARD}
- In UDK the chain doesn't work, because the CONF of the robot contains no information:
GETGEO {Type Robot} {Name Robot1}
GETCONF {Type Robot} {Name Robot1}
GEO {Name AirRobot}
CONF {Name AirRobot}
- Modified unreal-script. Added two parameters (MaxPitchAngle and MaxRollAngle). Values are degrees and should be radians:
CONF {Name AirRobot} {Type AerialVehicle} {SteeringType RotaryWing} {Mass 0.0000} {MaxAltitudeVelocity 2.0000} {MaxLinearVelocity 2.0000} {MaxLateralVelocity 2.0000} {MaxRotationalVelocity 100.0000} {MaxPitchAngle 25.0000} {MaxRollAngle 25.0000}
.
No answer on the GETGEO and GETCONF request from the GPSSensor_FIXED.
- Converted the angles to degrees:
CONF {Name AirRobot} {Type AerialVehicle} {SteeringType RotaryWing} {Mass 0.0000} {MaxAltitudeVelocity 2.0000} {MaxLinearVelocity 2.0000} {MaxLateralVelocity 2.0000} {MaxRotationalVelocity 1.745} {MaxPitchAngle 0.436} {MaxRollAngle 0.436}
Checked the code, but no messages are forwarded to the sensors. Open issue is why the Mass is zero. The superclass checks all parts which are PhysicalItem or Actuator. The AirRobot adds several parts (without specifying the type), but sets
the mass on zero for most parts (so that no trust is needed to battle the gravity?!).
July 21, 2011
- Today my first flight with the new UDK-AirRobot. Special care has taken on the sensor-suite, the sensor submit the same information as the real AirRobot.a First observation is that the rotors are not turning in the correct plane:
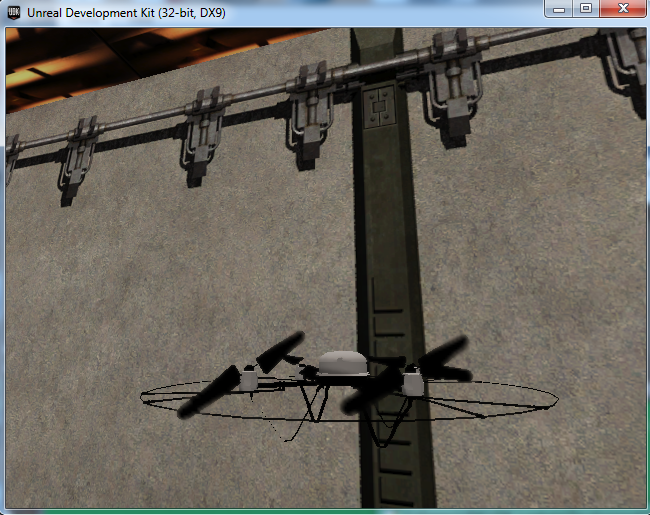
- Second observation is that the robot has problems with full forward and full stop. There is a 50% change that the AirRobot tips. Nicola Basilico is working on it.
- Another strange thing is that I don't seem to receive messages from the GPS and IMU. Will mount a GroundTruth sensor on the AirRobot to see if I receive message from that sensor. Added this sensor, still no SEN messages.
- Strange, same world, other robot. Just receive groundtruth messages. Something wrong with the clienttimer? The AirRobot uses Tick, the others Timer?!
July 18, 2011
- Looked at the possibility to detect Flags in UsarCommander. Worked on this issue in 31 October 2009. This was rev. 1989, the same branch (2009/assistence) does the same for the latest rev. The oker floor is recognized as pink flag.

July 7, 2011
- Did some tests for the UDK-demo tomorrow. Usarnaoqi works now (without initialize). Behavior Standing works, the block Stand-up not. Tchai-Chi works. Thriller, caravan-palace and ZombieDance not (although may be my computer was a bit overloaded).
- Started Kenaf with UsarCommander in ImprovedTestRoom. MultiDrive does nothing. Drive forward and backwards gives a spin. Turn left and right works.
- P3AT in ImprovedTestRoom works fine (except autonomous and waypoint).
July 5, 2011
- Followed instructions of Light tutorial.
Point lights are mostly seen on the ceeling, spotlights mainly on the ground.
- Add global smoke doesn't give smoke, even not for density 120000. In the SmokeDemo map this property is just 0.0
- After a while I found the property FogVolumeDensityInfo->FogVolumeActors and why should lock the properties of the VolumeDensity (to allow to select the Region, and add it with the green button).
- Remaining issue is that the smoke is a bit white and too dense (too sudden boundary).
- Made two overlaying layers. Global smoke didn't work.
July 4, 2011
- Imported map104.t3d into a new map. Selected all actors, cut and pasted here. Imported map165.t3d into existing map. Copied some corridors elements between both maps.
Rebuild lighting (9 min). Result is a lot of flickering.
- Received the code and worlds from Olaf.
July 3, 2011
- Loaded the NIST TestWorld. ModuleMaker.upk was missing, so copied that to \usarsim\Unpublished\Environments.
- Also the VictimAnimations were missing. There was a VictimPackage, but this one was modified. An svn-update solved this issue.
Remaining warnings: failed to set VictimController_0 owner of MaleVictim_9 because it would cause an Owner loop (7x).
- Replaced in the properties the Mesh with a new object (AnimTree). In the skeletonMesh I added the AnimSet (by first selecting the reference in the ObjectBrowser) and the correct AnimTree.
Result was a FemaleVictim breading on her back (while I selected StandingBreathing). When I did a Pitch rotate of 90 degrees the Editor crashed (maybe because I did the change before I closed the Play here window).
July 1, 2011
- Preparing the demo of UDK. Installed VS2008. Compiled and linked usarnaoqi without problems. Connection was more difficult, because the robotname should be in %AL_DIR%/preferences/simulator.xml. The PYTHONPATH=%AL_DIR%/lib should be set. Further the upis imageserver should be run in raw-format.
- After that, it seems to work (although no multiview in the master. I tested with the Standup-module, followed by a WalkTo-module,
- After that I tested behaviors:
- StarWars starts, but stops when the arm moves up.
- Also Presentation starts and stops.
- Thriller works.
- Caravan Palace works.
- Stand Talk works.
- Continued with the behaviors of Aibo Staircase. The robot falls for both behaviors (and has difficulty to stand up).
- Sander suggested that there is a difference in performance between his laptop and mine. He made three possible adjustments:
- The PhysicsResolution improves when switching from the default 1/200 to a value of 1/400. Parameter can be found at UDKGame\Config\UDKUSAR.ini.
- The MaxForceMotorType1 and MaxForceMotorType2 are too low. The can be found at development\src\UsarBot\Classes\Nao.uc.
- The collision model should be adjusted. Maybe the collosion boxed (nxvis) are to sensitive when the legs touch each other.
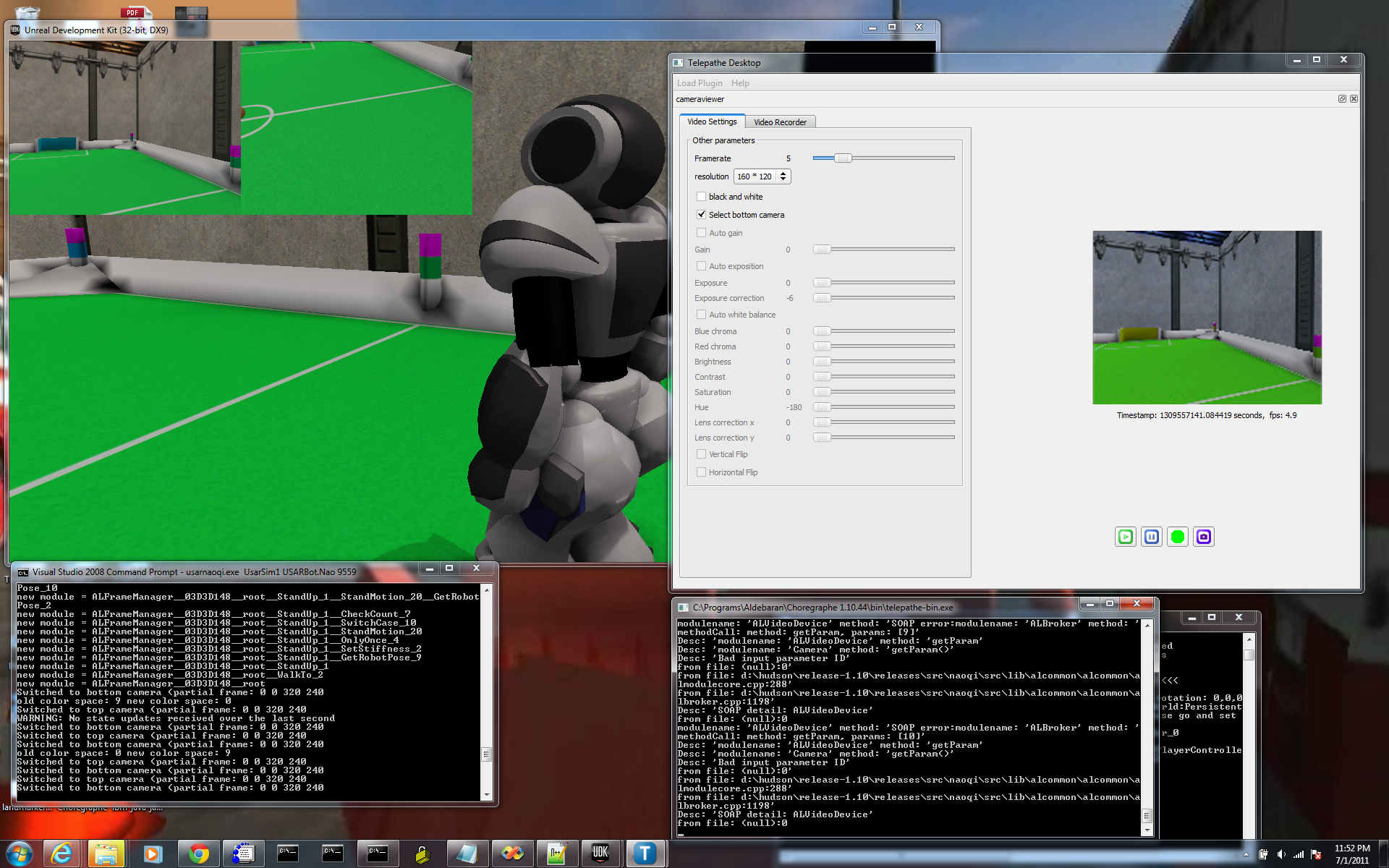
- Tested junebeta with MultiView. This works fine. One problem is that both camera's block each other when the Nao starts in the Gorilla pose. Another problem is that in TelePathe switching to the bottom camera doesn't work (Bad input parameter ID):
June 30, 2011
June 29, 2011
- Installed UDK June. Received warning 'CantBindPhysXProxy'.
- Received RoboSoccer map. Couldn't connect to server (also not with telnet). Also not works for UDK Feb 2011 (TestMap). Time for a restart?
- Continued with usarnaoqi for vc2005.
June 26, 2011
- Did first test with P3AT in UDK. Had to protect the status message (only battery level given). Without ImageServer, the map updates are slow.
- Added ImageServer (upis). Receive images, but not coupled to robot camera. Checked UDKGame\Config\DefaultUSAR.ini, but no USARCamera mounted. Mounted Camera, but still same effect.
- Also tried Kenaf. Yet, this robot has no sensors (yet).
- Only other robot is the Nao (not sure what its interface is). Checked the code. Drive is not supported. Interface seems to be SetJointTargetByName.
- Continued with usarnaoqi for vc2005.
June 20, 2011
- First test on the official difficulty test:
June 16, 2011
June 15, 2011
- Installed mysysGit (v1.7.4) and TortoiseGit (rev. 1.6.5). Had to put manually the msysGit\bin and msysGit\mingw\bin directories to my Windows-path.
- Git Clone needs an empty directory. According to the instructions in the readme.txt, this directory should be copied into the UDK directory (including the .git directory). 181 warnings (time to call Bas again). Could start both rooms (didn't test robots yet). TortoiseGit works as expected:
June 14, 2011
- Made a fresh install of UT2004 on u015305. Patch3369 was no longer available on unrealtournement.com, nor on beyondunreal.com. Copied the file from nb-unreal (there is also a 64bits version somewhere).
- Installed cygwin with cvs. Also needed package openssh. Now checkout with the command export CVSROOT=:ext:devopername@usarsim.cvs.sourceforge.net:/cvsroot/usarsim;cvs co usarsim works. Moved ARDrone (UsarBot) and ARDronePropellor (UsarModels) one directory up, to get the distribution working.
- Installed AAA_MapBaseFiles_V3.31 and DM-RoboCup06Worlds_V3.31. DM-compWorldDay4b works!
- Checked out rev. 2212. Added 2005.sln from original competition directory. Changed in USARBot.ini from ArmPioneer to CameraPanTilt. Receive many messages from unknown type (line not cleared). Behavior still not as expected.
June 13, 2011
- Tried to run DM-compWorldDay1_250.bat on nb-unreal, but game is missing installation-key. Also running UT2004-WinPatch3369 doesn't help. Tried again from disk. Installed only the play (not DirectX or shortcut). System was aware of patch. Now DM-compWorldDay1_250.bat works.
- Found at Labbook 2007, that I actually used DM-compWorldDay_250.bat for the indoor experiments. Position8 (-20,27,-4), which is at the end of the corridor above the Yellow Arena (SouthEast), is near the lobby.
- Added in corridor. Robot is turning in circles. Too much debug information to see why. Partly due to too much breakpoints. Now, a path is planned, but the robots runs straight into a wall (did see selection of first intermediate point, but robot seems too fast to get a turn command). Increased angle to 2.4rad. Path is from (-20, 27) to (-25.9, 27.8). First intermediate point is (-20.4, 27.4). Robot is already on its back before first position update reaches the motion). Reverted the LiveDriver to revision 2213, but still the PoseUpdate is too late. Have to try other revisions.
June 8, 2011
May 16, 2011
- Received on February 28 the files AR%20Drone Indoor.STL and Outdoor.STL.
- Found an explanation of the KInertiaTensor:
Mass distribution of Actor - indicates how easily it can be spun. This is the 'identity' inertia tensor, for an object with a KMass of 1 and a DrawScale of 1. It will be scaled internally if KMass or DrawScale are changed. Inertia Tensors can be anything but in most cases it is easier to only use 3 of the 6 fields. Index [0] is how difficult it is to roll the object, index [3] is how difficult it is to pitch the object and index [5] is how difficult it is to yaw the object. Set the other fields to 0. The larger these numbers are, the more the object will resist rotating. If all these numbers are very large the object will appear to be heavier than it is.
- The code uses KInertiaTensor(0)=((Dimensions.X/2)^2+(Dimensions.Z/2)^2)/3, KInertiaTensor(3)=((Dimensions.Y/2)^2+(Dimensions.Z/2)^2)/3 and KInertiaTensor(0)=((Dimensions.X/2)^2+(Dimensions.Y/2)^2)/3, which is (0.0241, 0.0232, 0.0451) for the AR.Drone (instead of the default 0.4).
May 13, 2011
- Brendan I. Koerner claims in the April issue of Wired (Volume 19-4, page 21-22) that a humanoid form is benificial for Search and Rescue Robots (because part of the stress and responsibility of the disaster is transfered to the robot).
May 9, 2011
- Sevastian intends to use the MVVM concept for his interface to allow easy adjustment to alternative displays.
- In the special issue of the EMAV 2009, Nichalos Roy describes in a Autonomous Flight paper about an UAV equiped with a Hokuyo laserscanner. All standard robotics tools are applied (Kalman, Gmapping, Carmen). What is new (for me), is that he refers to the "Sensor Uncertainty" metric (originally from Latombe) to make sure that the UAV with the short range laser scanner does't goes into open space.
April 20, 2011
- Copied UT3-directory from nb-unreal to u015305. UT3 fails on dx3d10_35.dll.
- Downloaded DirectX SKD (June 2010 version).
- With DirectX installed, I could start run-IrOpen2011Final.bat.
April 18, 2011
- Sevastian has chosen to use WebSockets to provide access to an UsarSim world. Looks promising, although wikipedia warns that binary frames are not supported (only textual frames). Will have to see how this works out for the images of the Upis-webserver.
April 13, 2011
- Sander is very busy with finding the right balance of the Nao. Marco Zaratti did some experiments to find the relation between gravity and mass. Those experiments are partly repeated in UT3. In addition, Marco did some experiments with robot physics, which Sander should reproduce.
April 8, 2011
- If seems that if UT3 is installed on the C-drive, it will look for the ini file at C:\Users\robolab\Documents\My Games\Unreal Tournament 3\UTGame\Config, even if you use -nohomedir.
- MaxSpeed is reported by CONF-message in UT3. The reported speed is 10 rad/s. Which should be "$class'UnitsConverter'.static.SpeedFromUU(MaxSpeed)$" (not the MaxDspeed actually used).
April 7, 2011
- According to UPM, their P3AT has a maximum speed of 0.7 m/s (2.5 km/h) and a maximum turning speed of 140 deg/s.
- According to manu-systems, the P3AT has a maximum speed of 2.88 km/h (0.8 m/s).
- According to the Mobile Robotics datasheet, the P3AT the maximum is 0.7 m/s.
- The value given in the DRIVE command is the percentage of the maximum spin speed (rad/s) from UT3 manual (the same in UT2004 manual) . The wheels of the P3AT have a 22cm diameter, so a perimeter of 2PI*11cm = 0.69115 m. So the spin speed is 2 rad/s.
April 6, 2011
- Found out that no noise was added to the laser-rangescanners. Also found out that the Noise I added in previous UT2004 was interpreted as
a percentage of the actual range(which was added as an UniformDistribution), while an absolute error was intended (with a NormalDistribution).
- Couldn't find the documentation of Unreal's utils.GaussRand(,). Behzad uses Mean and Sigma. So, the second parameter is not the variance, but the standard deviation.
- Implemented addition of noise range = range + utils.gaussRand(0.0,Sigma); in RangeSensor, but the effect doesn't seem big enough for the range a specified [25mm-25cm].
Should print some debug statements in unreal code.
April 5, 2011
- Arrived at the International Trade Fair. Directly tested the connection to the testserver. Works in legacy mode.
- Added IrOpenMapping to known maps. Committed revision: 2204
- Configured 3 robots in Mapping Map. Should give robot2 Point4. Should add RobotName to FrontierExploration.
- Check if pathloss is used.
- Working with Unreal Editor. Used commandline option to start editor. UT3.exe editor -nohomedir -mod=..\usarsim -log -useunpublished. UT3 help list opens a window with help-subjects. Yet, calling one subject directly (e.g. UT3 help Editor.UT3MapStats) gives no additional information.
Nothing about commandline options.
Import t3d in a new map (not open it!), after loading textures. Got some warnings when I did check map, but nothing serious.
April 4, 2011
- Couldn't reach u013154 or tunis. Will try to do ssh-tunneling for 146.50.56.61.
- Redefine u013154 as localhost in C:\Windows\system32\drivers\etc\host:
127.0.0.1 u013154.science.uva.nl # to allow ssh-tunneling
- Before I could continue with tunneling, the svn-server became reachable again.
- According to Okke's log, the waypoint transformation are working (2010/competition rev. 2157 May 28).
- Looking why Helen and I don't receive images. Both UsarClient and UsarCommander receive the error message "target machine actively refused connection to port 5013".
Switched firewall off, didn't help. Lets try the old ImageServer.
- The old ImageServer gives the error DetourCreateProcessWithDll failed. Error#87.
- Tried to rebuild the old ImageServer. I could copy the d3d8 library from upis, but found nice d3dx8 library.
- Yet, still same error. Seems that detours.lib on 64bits is a dead-end.
- The Old SimpleUI also contains detour.lib.
- The Old UsarUI doesn't need detour, but project is too old. New project complains about incompatible ATL and MFC libraries.
- Connected to Upis on nick's MacBook (32bits). Now I receive images.
March 31, 2011
- Updated UT3-usarsim to v504. I hope the MetricScore works for a 64bits machine (not only source code, also dlls). No errors or warnings.
March 25, 2011
- Downloaded version 1.1.1 of the Dell XPS LightFX SDK, which also contains 64-bits libraries. Seems that I already had that version, because 64bit version were present.
- Added Platform dependent post-build to LightFX. Platform was still AnyPC. With help of this advice: advanced build configurations are by default switched off for Visual Basic Developers, I could select a x64-build.
- I have a LightFx working version again on my laptop. Trick was copy /Y "$(ProjectDir)bin\$(ConfigurationName)\$(Platform)\GamingSDK.dll" "$(ProjectDir)..\..\Usar\UsarCommander\bin\$(ConfigurationName)". 32bits code should go into the directory AnyCPU (or x86).
- Building LightFX.dll gives two warnings about 32bit libraries: Systems.Data.dll and mcorlib.dll. Strange enough Systems.Xml.dll from the same DotNet distribution seems to be OK.
March 21, 2011
- Committed revision 2196 (only ConfigDialog changes, not yet MapInfo changes). Good news is that the svn-server is reachable again (tested in the wireless domain).
- Analysed UsarCommander.exe. Only UsarCommander.exe and IESHIMS.DLL are 32bits. Only one dll is loaded at highest level: MSCOREE.DLL. Start looking for 64bits variant of ieshims.dll. Current one is from C:\Program Files (x86)\Internet Explorer (version 8.0.7601.17514). 64bits version is available in C:\Windows\winsxs\amd64_microsoft-windows-ie-ieshims_31bf3856ad364e35_8.0.7600.16385_none_be3c68d42aec01f7 (version 8.00.7600.16385).
- Cleaned up u013154. The DNT_hockey team has put a full geode image on the svn-server.
- u013153 and sparta are now correctly wired to the network.
March 20, 2011
- Added LINKER_FLAGS=/MACHINE:64 to the correct makefile (gdal\makefile.vc). There seems to be no option to specify the machine to the compiler. Now the port\cplgetsymbol.obj (32bits) confilicts with the 64bits target.
- Followed instructions on How to create 64bits code. vcvarsall.bat amd64 reports: tools not installed. Also don't see a 64bits commandline. This tools require a custom installation.
- Installed 64bits compiler. cl.exe now also reports that it is 64bits (so I could remove the explicit setting of WIN64).
- With the 64bits commandline, I as able to build nmake gdal and nmake gdal-csharp. Also found that this build was already available in teh release-1400-x64 directory of the zip-file.
- Copied the dll from the the release\bin to the ThirdParty\GDAL. 9 files overwritten (hdf5dll.dll, libcurl.dll, libfcgi.dll, libmap.dll, libmysql.dll, libpg.dll, netcdf.dll, sqlite3.dll, zip1.dll). Some files are newer (xerces-c_2_8.dll, gdal18.dll). In the csharp directory 4 files are overwritten.
- Changed code on three places (api-changed?!). Still, MapInfo.Save fails on ogr.RegisterAll.
- Tried the program ogrinfo.exe, which is part of the distribution. This program complains that it cannot load ogr_wrap.dll (although it is in the same directory). Added csharp directory to path, still ogr_wrap.dll is not found.
- Tried ogrinfo Zeus_Path.mif and gdalinfo report-0-[map].tif in OSGeo4W-shell. gdalinfo fails in 64bits prompt (on initializer for OSGeo.GDAL.GdalPINVOKE). Same for 32bits prompt.
- Added OSGeo4W to path. gdalinfo works now, but is only the exe of OSGeo4W. The exe from release-1400 fails.
- Did an inspection with dependencywalker. IESHIMS.DLL is not found, and some modules are 32bits (GDALINFO.exe).
Inspected also OSGeo4w. Same IESHIMS.DLL, and again GDALINFO.exe is 32bits. Also GDAL14.DLL and MSVCR71.DLL are 32bits this time.
- Tried gdalinfo.exe in \src\gdal-dev-x64\gdal\apps. The app is missing gdal18.dll. This library is one directory up. Only library there, next missing is xerces-c_2.8.dll. Calling this app from experimental ... Debug works (both from console with or without OSGeo4w. Without OSGeo4w gdal18.dll is missing, with OSGeo4w leads to an application error (unable to start correctly). Same app works from experimental\ThirdParty\GDAL.
- Inspecting this app shows that MSVCR90.DLL is missing. 2008 redistribution is already installed, installed 2010 redistribution. Also installed 2008 32bits redistribution. Added C:\packages\gdalwin32-1.6\bin to path, which contains MSVCR90.DLL. No complaints of Dependency Walker anymore (except missing export-functions.
- Restarted VisualStudio. MapInfo file is now correctly saved (in AOJRF_REPORTS).
March 19, 2011
- gdal-dev (release 1400) is 246 Mb (14k5 files). According to the readme, I should execute nmake gdal and nmake gdal-csharp from a VS command prompt. Will first try to do only nmake gdal-csharp.
- nmake failed because the automatic detection of WIN64 failed. Explicitly defining WIN64 solved this issue.
- nmake gdal-csharp fails because swig isn't build yet.
- nmake gdal runs. Fails at linking gdal18.dll (conflict x64 and X86) after succesfully making frmts.
- Added LINKER_FLAGS=/MACHINE:64 to gdal\makefile.vc. nmake gdal-csharp works, but is missing gdal_i.lib. nmake gdal-build seems to create a nice distribution in OUTPUT_DIR.
- Yet, still conflict with xerces-c_2_8.dll. xerces.dll is already in release\bin (and nicely x64). The target is not x64 (LINKER_FLAGS not used).
March 17, 2011
- Found instructions for 64bits version of GdalOgrCsharp. Downloaded swig-package for OSGeo4W setup (in etc/setup). OSGeo4W-shell didn't startup (lti_lidar_dsdk.dll missing). According to GlobalMapper, this is due to a missing MSVC2008 redistributable. Downloaded 64 bits version. Doesn't seem to help, still problems with gdal_MG4Lidar.dll and gdal_MrSID.dll. Installed gdal-mrsid package, both errors gone! Swig only seems to be a python-app to build wrappers around the C++ version of the GDAL library. Couldn't find the interface.i file to execute command swig -csharp interface.
- Downloaded GDAL SDK source code for vC2005 (64bits). Should build those first according to BuildingOnWindows instructions. In the dev-package there is in the directory gdal a makefile.vc. 64bits libraries should be made from source, FWTools is only 32bits.
March 16, 2011
- Try to run NomadPlayBack. Got warnings about quering Usarsim while I selected LogFile, and an error on the LightFix library. Lets try a rebuild to get rid of 32-bit code.
- Made some code to protect query. Still, LightFX gives problems. LightFx.dll is rebuild (64 bits), but GamingSDK.dll not. Should check for 64 bits GamingSDK when there is internet. Removed in UsarLib reference to LightFX.dll and removed post-build command. Commented out section of TeamController.
- All sonars at the front seems to be out of range. Which seems to be true from the logfile. Only, I expect the sonar all around (instead of at front).
- No BufferLayer problems. Is this related with logfiles with images?
- When I stopped the run, I received an error from Tools.MapInfo.InitializeOgr (line 128). Also ThirdParty GDAL is 32-bits binary, without source code to remake it.
- Same behavior for NomadRun19Feb.log. Couldn't find logfiles with images. Tried InterLeagueChallenge, also works fine.
6 January, 2011
- Calles services.msc to see that "C:\Program Files\CollabNet Subversion Server\svnserve.exe" --service -r "d:\svn_repositories" --listen-port "3690" was running. Added this program to u013154 firewall exceptions.
- Also Remote Desktop works again.
- Carsten and Benjamin started with the UsarSim AR.Drone project.
5 January, 2011
4 January, 2011
- Downloaded subversion-1.6.15 and built it from the tarball.
Labbook 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004
{kind=link}