Wishlist
- 3D user-interface (open)
- 3D-Mapping (open
- Joint Rescue Forces list of tasks
- small tasks
- Reconnect when in range
- Use status message to select view.
Started
Labbook 2014.
November 18, 2013
October 23, 2013
- Maybe an idea to extend the LCM study; try the Ach protocol, downloadable from golems.org.
- Read the Ach Technical Report. Ach uses a circular buffer of shared memory, which allows to read the latest update (and a few older copies in the circular buffer). It runs on a single processor, in 2011 it was not coupled with a suitable network transport such as SCTP or RDS.
September 13, 2013
- sudo apt-get install xutils-dev also installed makedepend. Did a make clean, corrected the INC_DIR for cnl. Solved a missing link in ipt. Yet, I couldn't find any good target for the missing x86_64_init.h in ithread-directory. Found the instruction in README-COMPILE-5.0 that the file src/make/make.include should be edited (to reflect the MissionLab home directory).
- Found out that MissionLab is already at version 7.
Could find the improvements of each version back to version 4.
- Downloaded version 7. Yet, also this distribution fails on the missing link in Cthreads.
- Downloaded Cthreads directly from GaTech (version from Sept 2002). That explains why it couldn't be compiled on a 64-bits system.
- Instead installed MissionLab-Carmen project, which replaced the troublesome
Cthreads and IPT for pthreads and IPC). Tested the demo in /usr/demos/grousal_demos/missionlab and it worked. Also the demo in directory carmen and missionlab_carmen worked.
- The source code is also installed (directly in /usr/src, arggh). Didn't tried to compile it yet. There is a directory for IPT, not for Cthreads.
September 12, 2013
- Should try the MAST-village demo, based on UT2004.
- Downloaded USARSim-MAST-Files-v1.2.zip, unpacked it (no warnings about overwriting, except for USARBot.ini (MAST version 30% smaller) and USARMisPkg.ini (MAST version 50% smaller) and made it (two warnings about RangeScanner.ScanInterval obscuring the base class RangeSensor.ScanInterval).
- Their package contains the DragonflyRobot and a SICKLMSMini. The Textures directory not only contains MAST_Textures, but also rapdwntex.utx, which seems to be part of DM-Blackhawk, which is part of the distribution.
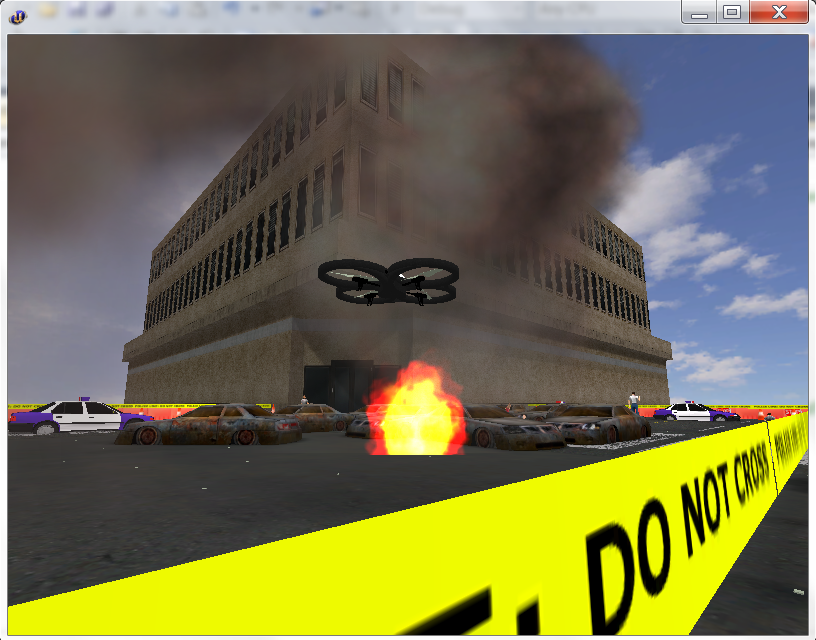
- Started UT2004\Startup-Scripts\MAST-village.bat and got a nice middle-east village with power lines which will make flying difficult:
 .
.
- Made a Startup-Scripts\DM-Blackhawk.bat (which only starts from UT2004\System). I like MAST-village better (with the surrounding hills), although the overflying helicopter and the antennas on the roofs are nice:
 .
.
-
- Downloaded MissionLab-MAST-v1.16.tgz on nb-ros. Did a configure in packages/MissionLab-MAST-v1.16/src and said yes to all questions (OpenGL (mlab), Mobility (HServer), OpenCV (HServer), Gazebo (HServer)). Got a warning about csh being not installed, although the configuration said it was successful.
- Make all failed, so did a sudo apt-get install csh. Still an error in cnl/makefile (put a space between makedepend). Did a make clean and a configure with a no to all questions (default answer). Now configure creates many depends. Machine hangs halfway the configure?! Try a restart. Script was in a loop entering and leaving the cnl directory, so I removed the space again. Configure now fails on missing imake when performing a configure ipt/src. Couldn't find a package for ubuntu. Solved by sudo apt-get install xutils-dev. Still, an error in communications/ipt/unixcommunicator.cc, which expects libc.h in its local directory. Changed the INC_DIR from .. to ../../../include. Next failure is in Cthreads/ithreads.
-
- In their Virtual Manifacturing 2012 paper, Jacobs is already using ROS nodes to connect to USARSim.
June 20, 2013
- Added both Envy material packages. Now only complaints about ManufacturingPlant, OfficeMeshes and AirRobot.
June 13, 2013
- Installed UDK Feb 2013, to test the modifications in MultiView and Canvas. The Editor (no USARSim mod yet) starts up without any problems in 64bit - DX9 mode.
May 23, 2013
- Updated ~/ROS/packages/usarsimros-code with command git pull. Looked into usarsim_joint_gui. The build.gradle is a mavin-plugin for eclipse, which gives some clues about dependencies. Tried a direct compile by command javac -cp `pwd` ActuatorControl.java, but package org.ros.node.topic could not be found.
- Started eclipse (version 3.7.2), but could not find how to include a maven-plugin (project has been renamed several times).
May 16, 2013
- Trying to make drcsim-groovy by installing from source. Modified the instructions slightly, first the gazebo dependencies:
sudo apt-get install -y cmake debhelper libfreeimage-dev libprotoc-dev \
libprotobuf-dev protobuf-compiler freeglut3-dev \ libcurl4-openssl-dev libtinyxml-dev libtar-dev \
libtbb-dev libogre-dev libxml2-dev pkg-config \ libqt4-dev ros-groovy-urdfdom ros-groovy-console-bridge libltdl-dev libboost-thread-dev libboost-signals-dev \
libboost-system-dev libboost-filesystem-dev \
libboost-program-options-dev libboost-regex-dev \ libboost-iostreams-dev robot-player-dev libcegui-mk2-dev \ libavformat-dev libavcodec-dev libswscale-dev libbullet-dev
- Next step: installing osrf-common dependencies:
sudo apt-get install -y cmake debhelper ros-groovy-ros ros-groovy-ros-comm
- Next step: sandia-hand dependencies:
sudo apt-get install -y cmake debhelper ros-groovy-xacro ros-groovy-ros libboost-dev ros-groovy-image-common ros-groovy-ros-comm ros-groovy-common-msgs avr-libc gcc-avr libqt4-dev
- Last step: drcsim's dependencies:
sudo apt-get install -y cmake debhelper ros-groovy-pr2-mechanism ros-groovy-std-msgs ros-groovy-common-msgs ros-groovy-image-common ros-groovy-geometry ros-groovy-pr2-controllers ros-groovy-geometry-experimental ros-groovy-robot-model-visualization ros-groovy-image-pipeline ros-groovy-image-transport-plugins
- First test if this already works, because the ros-groovy-msgs are now installed. Started websocket and gazebo again. The html-script gives no longer a warning, but also doesn't show any information. Websocket still gives the error:
subscribe: Unable to load the manifest for package atlas_msgs. Caused by: atlas_msgs
- Replaced atlas-state by groundtruth (nav_msgs/Odometry). First response was undefined, but errors are about set_param.
- Installed python2.6 from deadsnakes. Result is /usr/bin/python2.6, while /usr/bin/python is still a link to /usr/bin/python2.7. Checked /opt/ros/groovy/lib/, but groovy only has /opt/ros/groovy/lib/python2.7, so there will be no python2.6 sidepackages.
May 15, 2013
- Waited nicely until both machine and launch were blue. Still, starting the simulator from the Cloudsim console showed no progress. Stopped the task.
- Started from the commandline with additional arguments: roslaunch atlas_utils qual_task_1.launch gzargs="-r --record_path=/tmp/qual_task_1". The simulator seems to be running, but I have problems to connect.
- Forgot to do a sudo ./start_vpn.bash. After that I could ping 11.8.0.1, Yet both gztopic view and export ROS_PACKAGE_PATH=`pwd`:$ROS_PACKAGE_PATH; python walk.py failed (Waiting on master).
- The launch failed because the directory /tmp/qual_task_1 didn't exist. Run again with command roslaunch atlas_utils qual_task_1.launch gzname:=gzserver gzargs:="-r --record_path=/tmp/qual_task_1". gztopic view complains about conflicting gazebo versions (1.7.3 at pc-udk; 1.8.0 at cloud). Did a complete update, but nothing has to be updated. On the cloud a did a drcsim/setup.bash; on pc-udk I did a setup folllowed by a ros.bash.
- When gzserver is launched I get the error "gzserver: malloc(): memory corruption (fast)".
- Started the gzserver locally at pc-udk. This one starts without any errors. Only the machine is getting to a complete halt (90% cpu used). Could contact it with a script . local.bash (bash local.bash didn't change the GAZEBO_MASTER). Did a complete apt-get update; apt-get upgrade although I didn't see any important differences. Tried to start a Qualification task 2, but button remains grey. Tried to do it from command-line, got segmentation fault.
- Found a paper about rosbridge, which promiss a coupling between ROS (and lcm) and web-applications as rosjs and json. There is also a more recent publication. Rosbridge (v2.0) is available from its own website.
- Installed the rosbridge-server with command sudo apt-get install ros-groovy-rosbridge-server, followed by sudo apt-get install ros-groovy-rosbridge-suite. Before starting, I needed roslaunch (sudo apt-get install ros-groovy-ros-base). Executed source /opt/ros/groovy/setup.bash again to set ROS master URI. Then the command roslaunch rosbridge_server rosbridge_websocket.launch starts a server on port 40774. According to the documentation and [INFO] it starts a WebSocket at port 9090.
- Made a simple webpage which connects to the Websocket and asks for atlas_state. Unfortunatelly, I get the error message:
[ERROR] [WallTime: 1368634389.483978] [Client 3] [id: subscribe:/atlas/atlas_state:1] subscribe: Unable to load the manifest for package atlas_msgs. Caused by: atlas_msgs. Should look for groovy-atlas-utils.
- Problems of today could be due because I started a simulator_prelease constellation.
May 14, 2013
- Did an apt-get update; apt-get upgrade on pc-udk (438 packages updated).
- Started with ~/packages/cloudsim-1.4.0/bin/create_cloudsim.py, as described in Cloudsim Tutorial. Next I had to download the keys from my Cloudsim instance, and start /tmp/simulator_xxxxx/start_vpn.bash. Started a qual_task_1.launch.
- Started sudo . start_vpn.bash. VPN is ready, but couldn't ping 11.8.0.1. Also rosrun rviz rviz could not contact ROS master at [http://11.8.0.1:11311]. Problem was that openvpn was not installed. After an sudo apt-get install openvpn I could ping. Yet, rviz stills fails. Telnet also fails (firewall problem?)
- Looked at the meaning of the yellow blinking light. This means that the simulation is starting up, when running it should blink blue. Tried to stop it but this means a blinking red simulation task (for ever).
- Checked with ssh, but /usr/share/drcsim-2.5/ros/atlas_utils/launch/qual_task_1.launch exist on this machine. I will terminate this constallation and try again. Directly when available I downloaded keys and monitored progress. The setup.log is short (installed openvpn key, setup auto xsession login, install drcsim). the tail from launch_stdout_stderr.log is more interesting. First getting the packages, unpacking, setting it up. In the mean time the Cloudsim console only showed an orange button for the launch and a blue one for the machine. After a while I was kicked out (rebooting). When I was able to login, the launch was blue and the simulator red. The simulation task was already starting up (yellow light blinking).
- Manually started up roslaunch atlas_utils qual_task_1.launch gzname:=gzserver remotely. The first time I did rosrun rviz rviz I got a screen (with only hands). On the background I got many warnings about textures and meshes (not found relative to stack). Rerun drcsim setup, but now I get segmenation fault (after warnings about 2 visuals. Running from a fresh terminal gave me the same window (with OGRE warnings).
- Started gztopic view, which gave me the camera images (looking to the sky). Started keyboard_teleop, which gave me started roslaunch server at http://11.8.0.2:36017/ with two nodes (actionlib_client and actionlib_server).
- I created a score.log in /tmp/qual_task_1, but gzlog stop waited for ages on master. Created an empty state.log. Run the script /usr/bin/mkqual.bash 1 /tmp/qual_task_1/state.og /tmp/qual_task_1/score.log. Failed to get this zip-file from machine (scp mremote failed on ssh-authentication). Copied manually (part of) the content of the local logfiles and uploaded those to vrcportal. Terminated second simulator constellation.
May 13, 2013
- Did an update to cope with all issues the other teams had found this last week. Tried to start the first qualification run with roslaunch atlas_utils qual_task_1.launch, but this failed (maybe because the installation was still busy in the background). Copied the demo.py from the control switch tutorial.
- The tutorial now works, but the robot falls when commanding neck and arms. Brought the robot back via roslaunch atlas_utils keyboard_teleop.launch: Reset. Also without the movement of the arms the robot falls.
- Added reset command to walk.py as pre-step. This works. Should also include teleop walk commands, which are the method twist.
- I could now walk 4 steps. Strange enough it needs to demo walk, although it doesn't walk during the demo walk. Asking for another 4 steps with the same message doesn't work.
- Got complains of using control_mode instead of sim_interface. Gave Freeze command via sim_interface, but now the robot falls on his back.
May 6, 2013
- Trying to reproduce experiments of 2007. Made a script that starts DM-compWorldDay4b_250 with upis. Found that the start positions in the NorthEast are (-20, 17.5, -4), (-21.5, 17.5, -4) and (-21.5, 16, -4). Repaired a ComStation for UT2004 and mounted a GPS for the P2AT.
May 5, 2013
- Following the video of the Gazebo workshop. Maybe the model of the PowerPlant is a nice model to try to include in USARSim.
May 4, 2013
- Received the MRESim software from Julian. Build the software with ant, run the software with the command java -cp build\classes gui/MainGui:
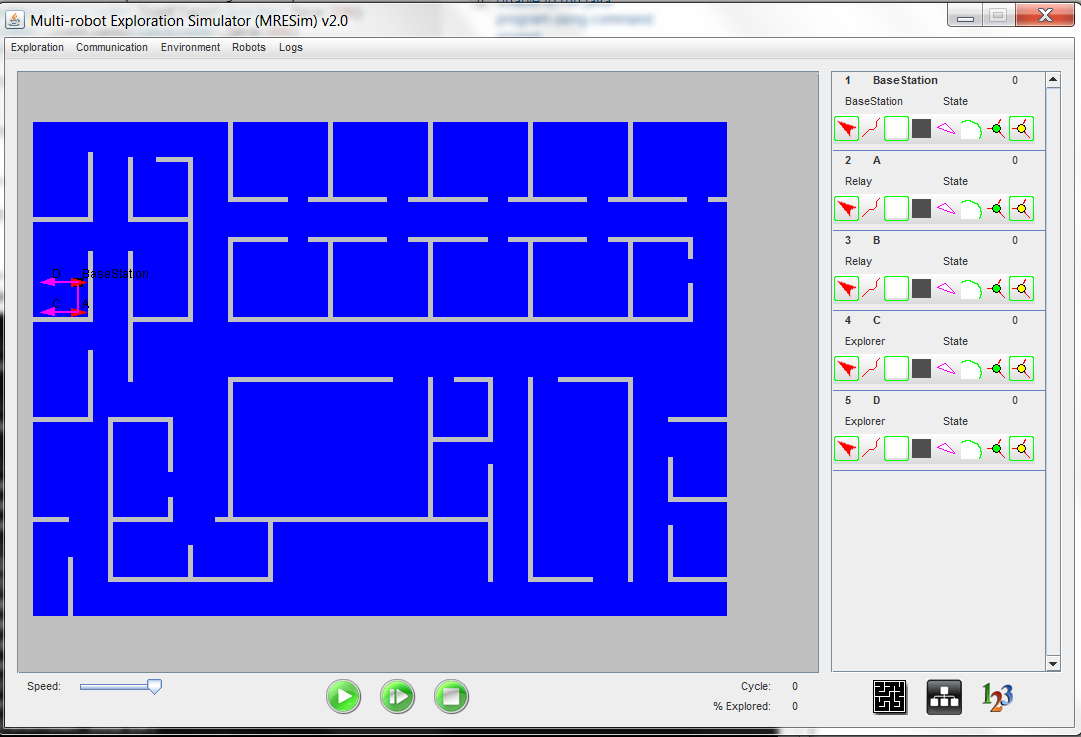
- Also on Linux (nb-ros) the software worked fine (with ant and openjdk-6-jdk). Only difference was that the robot configuration consisted of only a basestation. Loading the robot4-maze configuration solved this issue.
April 24, 2013
- Tried to reproduce starting the service from nb-ros. Found my keys on /media/KINGSTON/persoonlijk/AmazonWebService.txt.
- Starting 'simulator' constellation.
- Continued with sudo apt-get install drcsim ros-fuerte-visualization, as indicated in gz client remote tutorial. Failed to get 64bits drcsim. After an sudo apt-get update it worked.
- Continued with instructions and downloaded simulator_sessionID.zip. Unpacked it in /tmp. The script indicates that the ROS_MASTER is on machine 11..8.0.1 (and the IP on 0.2), but I could not ping both machines:
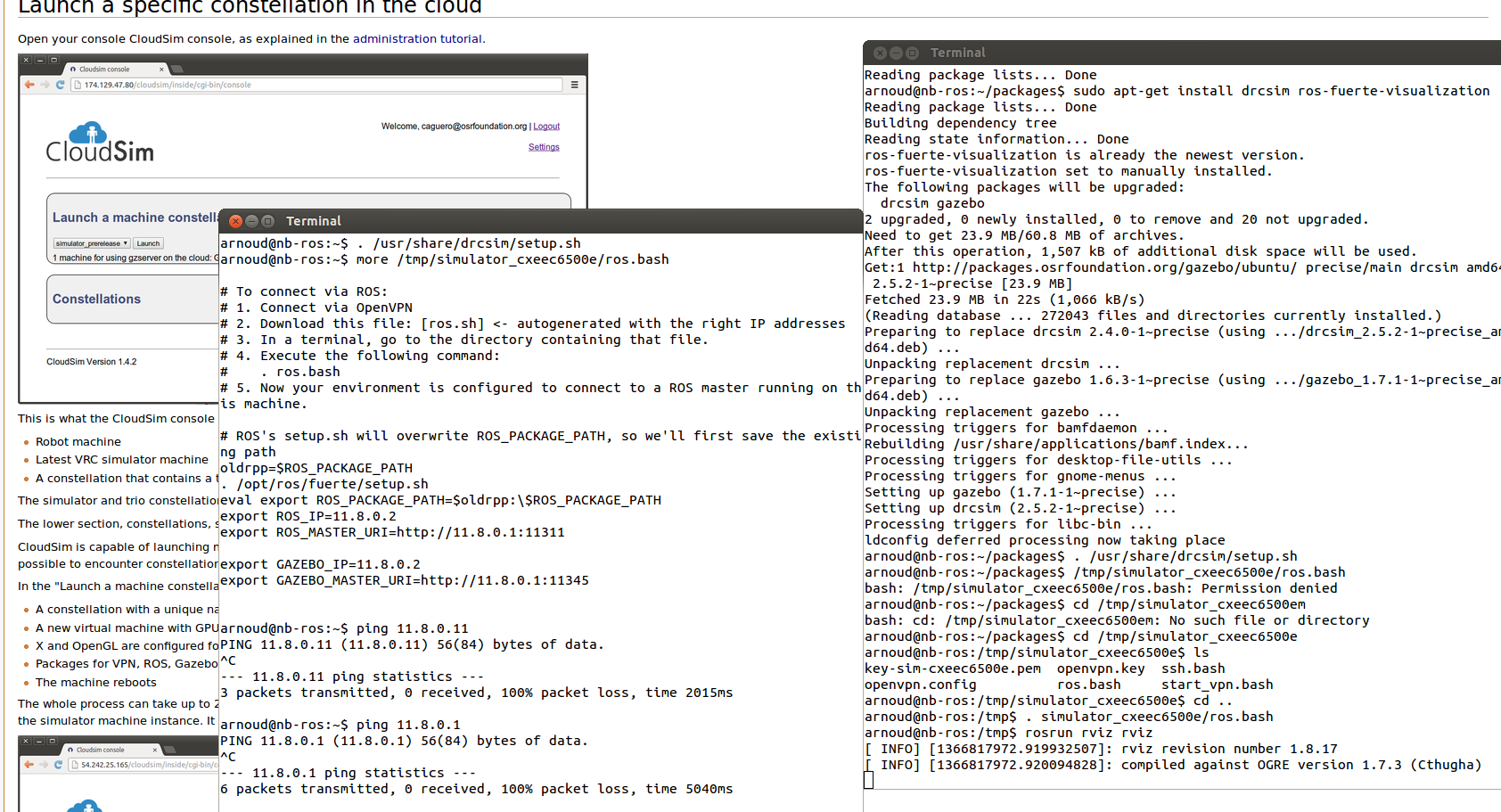
- If I read it right, the rviz should be started locally (so I also started roscore), while gzclient and rostopic should be run after the simulator_sessionID\ros.bash (which let them connect remotely). Yet, the result is not much better: they are waiting on their master:
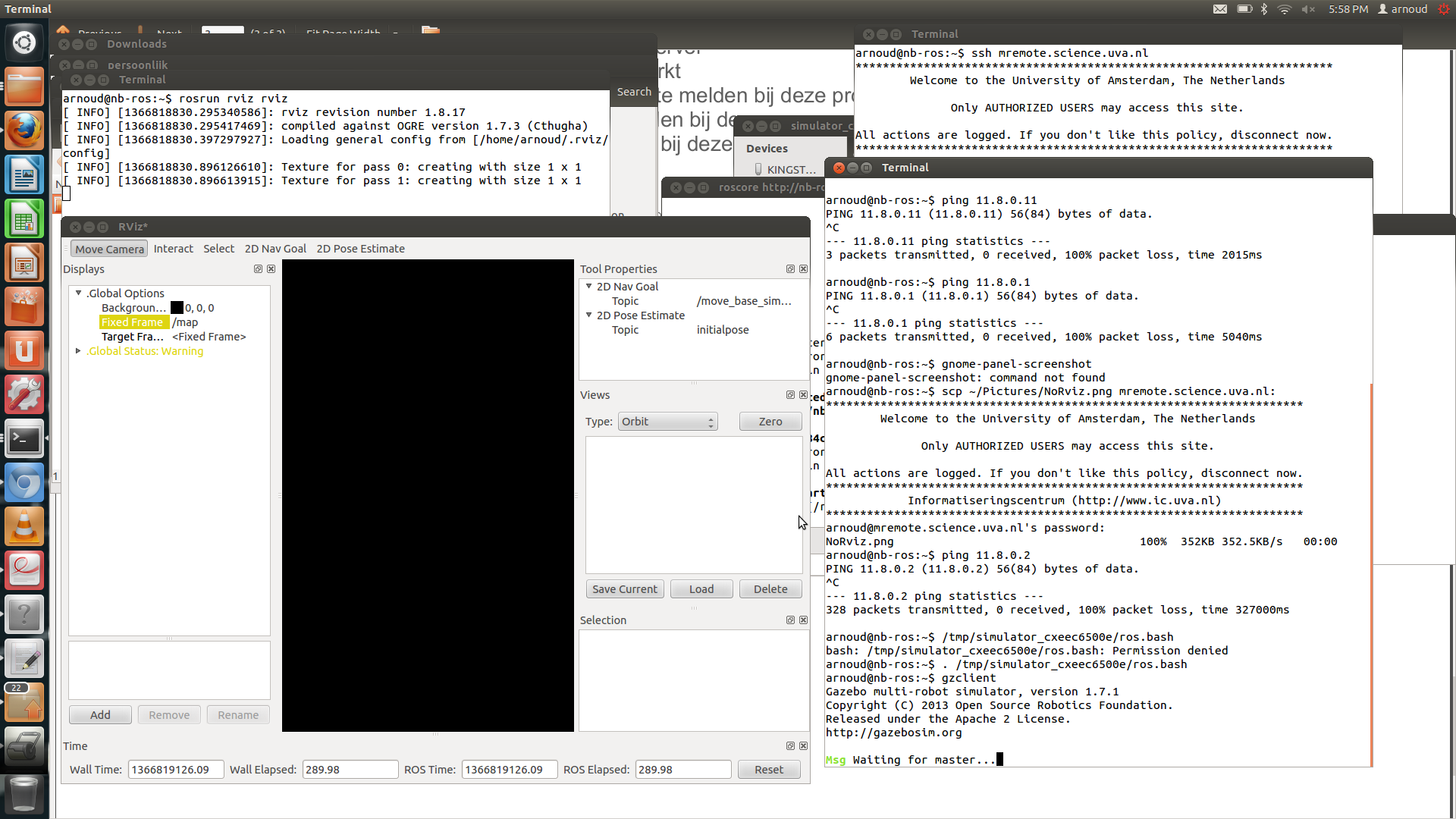
- Checked the vpn connection tutorial.
- With the vpn running, I could ping the ROS-master. Still I get a very long waiting for master clients:
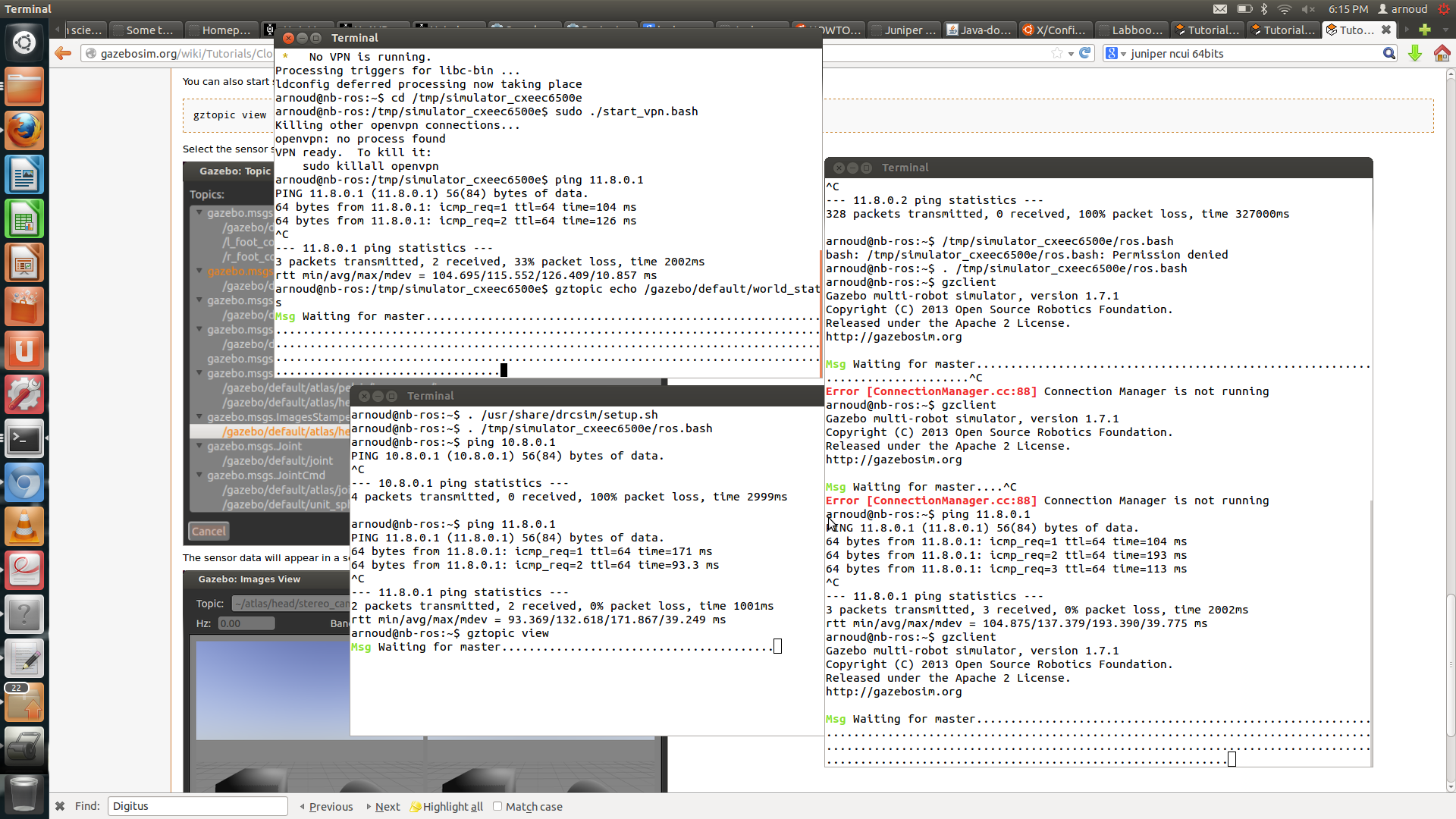
- I forgot to start a Simulation task. Now I get a Gazebo screen:
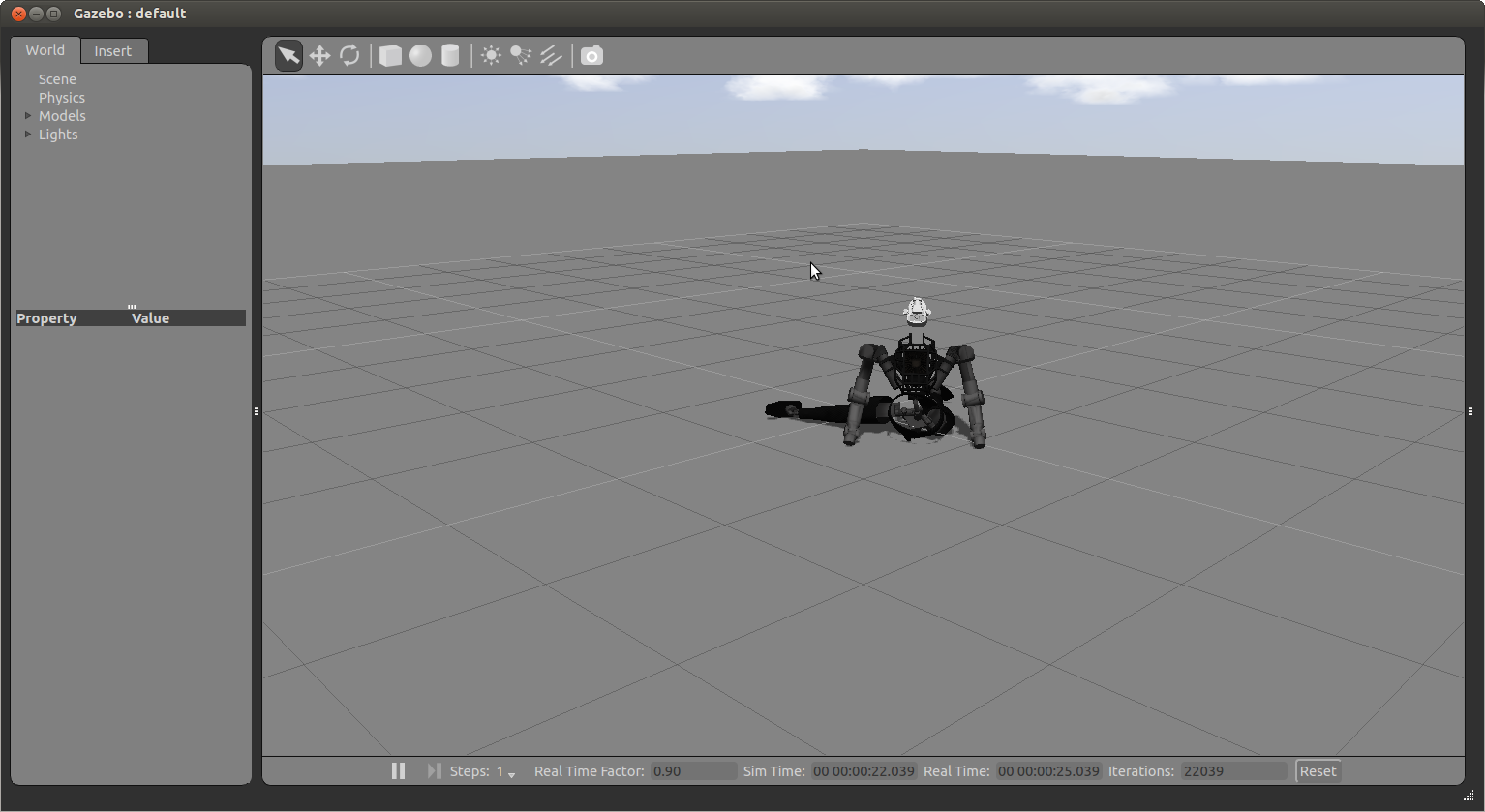
- (Un)luckily the command gztopic echo /gazebo/default/world_states crashed.
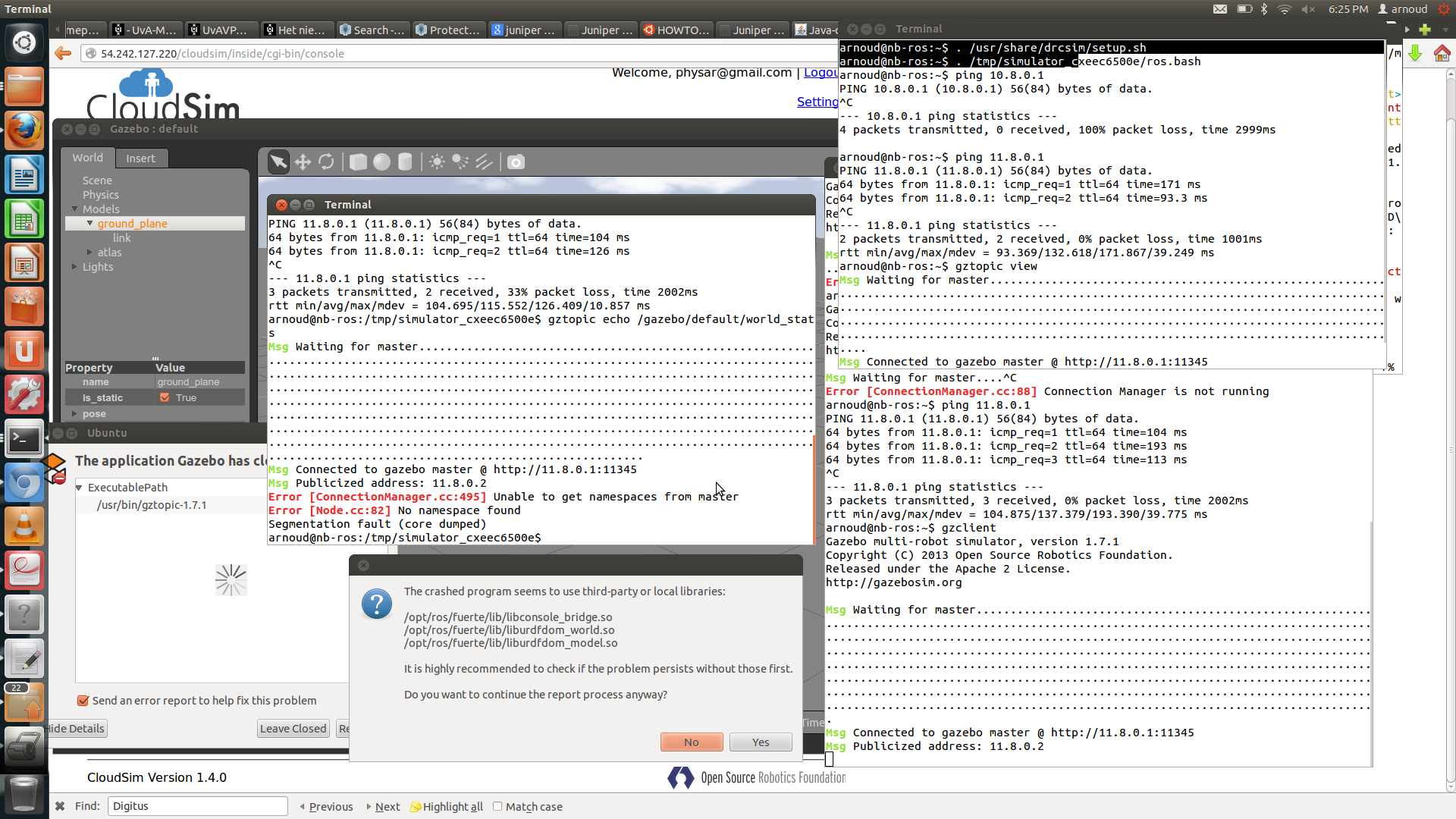
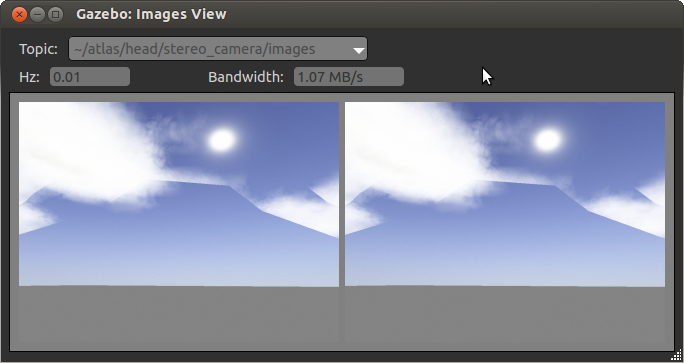
Updated 22 packages (including drcsim) and tried again. Now gztopic works and I also get camera images:
- Stopped the vpn and stopped the simulation task (hopefully for my credit-card this is enough).
April 19, 2013
- Finally was able to start vpn on a 64bits Linux system. Downloaded ncui-7.3R4.i386.rpm. This package checks the preconditions, so can't not be automatically installed. Unpacked the contents with command tar -ztvf ncui-7.3R4.i386.rpm in /tmp. Copied the contents to /usr/local/nc.
- Used the trick at the Ubuntu Forum and downloaded a 32bits java version and replaced /etc/alternatives/java with a script which redirects java to the 32bits version if the argument starts with NCx.
- The command sudo ./ncsvc -h uvavpn.uva.nl -u XXXXXXX -r users -f uvavpn.uva.nl.der & now works (otherwise I couldn't have made this entry in my blog).
April 17, 2013
- My Digitus DN-3023 Ethernet Adapter has arrived. Initially it looked like the card was not working. Installed the drivers from Asix AX88179.
- Followed the tips from Ask Ubuntu. The device is listed when I inspect with command lsusb. It is also listed in /etc/udev/rules.d/70-persistent-net.rules as eth0. The command ifup eth0 didn't work. Adding a rule in /etc/network/interfaces, as suggested, didn't solve issue. Checked with command dmesg -kernel the messages and got the message that the card used more power than allowed. Also no LED lighted up at the Ethernet connection. I switched from battery to line-power, which solved this issue (LED lighted up and I got a wired connection).
April 16, 2013
- Followed the CloudSim instructions and created an Amazon Web Service account.
- The increase of EC2 GPU instance limit can take 3-5 business days :-(.
- Continued CloudSim Setup and downloaded v1.4.0 of cloudsim. Now I only have to wait minutes to be ready :-).
- Started first remote simulation task, but couldn't find the simulator_ID/ros.bash as mentioned in Cloudsim remote gzclient tutorial. Should try Download Keys button in the Cloudsim Console.
April 7, 2013
- Was able to run DM-RoboCup2009Indoor1. The wine command performes a make in the ~/.wine/drive_c/UT2004/System directory. So I copied all USAR*.u files from this directory to ~/Games/UT2004, and the simulation works.
April 6, 2013
- Copied the contents of /opt/UT2004 into ~/cvs/usarsim, so that I have write permission. Made System/make_native.csh which doesn't use wine. Still the UT2004 is missing the UT2004.ini.
- The native compilation failed: 'ucc make' is broken on Unix/Mac right now.
- Tried just to start game. The splash-screen starts, but "Can't find file 'Entry'. Copied Entry.ut2 to Maps. Next error is "Can't find file for package 'AS_FX_TX'. Copied the Maps, Textures, StaticMeshes and System/*.ini and *.u from nb-udk to nb-ros. At the end I was missing XGame_rc (battery gone of nb-udk). Some *.u files were still missing in System. After copying Animations I got a Tutorial of a DeadMatch.
- I installed wine. The first call seems to install a directory ~/.wini in my home-drive. In ~/.wini there is a directory drive_c, which contains Program Files and Windows. Copied my UT2004 from nb-udk to this drive_c. Should add this UT200e to PATH in system.reg.
- The command wine C:\\UT2004\\System\\UCC.exe make -ini=USARSim.ini worked, but still the response on ../System/ut2004-bin-linux-amd64 DM-RoboCup2009Indoor1?game=USARBot.USARDeathMatch?spectatorOnly=1?TimeLimit=0?quickstart=true -ini=USARSim.ini is:
Failed to enter DM-RoboCup2009Indoor1?game=USARBot.USARDeathMatch?spectatorOnly=1?TimeLimit=0?quickstart=true: Can't find file for package 'USARBot'
April 5, 2013
- Installed the package libstdc++5, but the libSDL is not part of this package. It is part of libsdl1.2debian (which was already installed). Made a link to the library in /usr/lib/x86_64-linux-gnu. UT2004 starts,
but complains about MissingIni.
- Continued with controlling the AR.Drone from USARCommander. Send the Sonar GEO and CONF request, but the spawning was too low. Increased from -1.49 to -1.40. Now the AR.Drone is correctly spawned and all GEO and CONF request
are send. I saw both camera's, but do not receive them in my GUI:
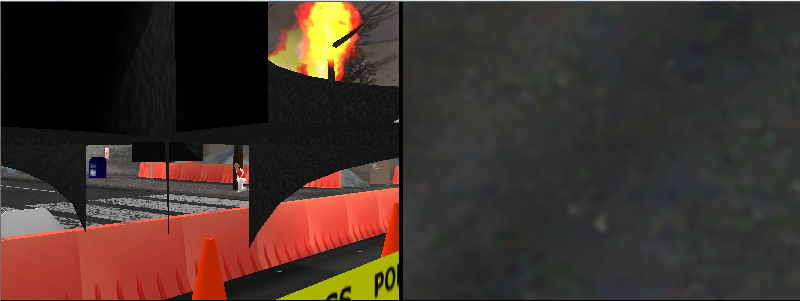
- Increased in the USARBot.ini the X of front Camera from 0.024 to 0.224 (and the spawning heigth to -1.3, still a lot of turning while lifting up). The view is much better:

- Made 32bits version of upis. Had to put 'ignore warning 4273' on to get it build. Running upis with command upis.exe -l -f NORMAL ..\..\System\ "DM-compWorldDay5c_250?game=USARBot.USARDeathMatch?spectactoronly=1?TimeLimit=0?quickstart=true -ini=usarsim.ini" gave error "DetourCreateProcessWithDll failed with error: 5". With ..\..\System\ut2004-win64.exe gave error 0 and ..\..\System\ut2004.exe gave the error that the detour.dll couldn't be found.
Sander made its own hook because there is no 64bits detour.dll.
- Modified USARSim.ini (in [Engine.Engine] from [Engine.Engine] RenderDevice=D3D9Drv.D3D9RenderDevice to RenderDevice=D3DDrv.D3DRenderDevice. Now it works. Only I get the splash screen. Probably I forgot the space in front of the map. Downloaded the working script RoboCup09%20Indoor1.bat. For RoboCup2009_Indoor I am missing NISTTextures.
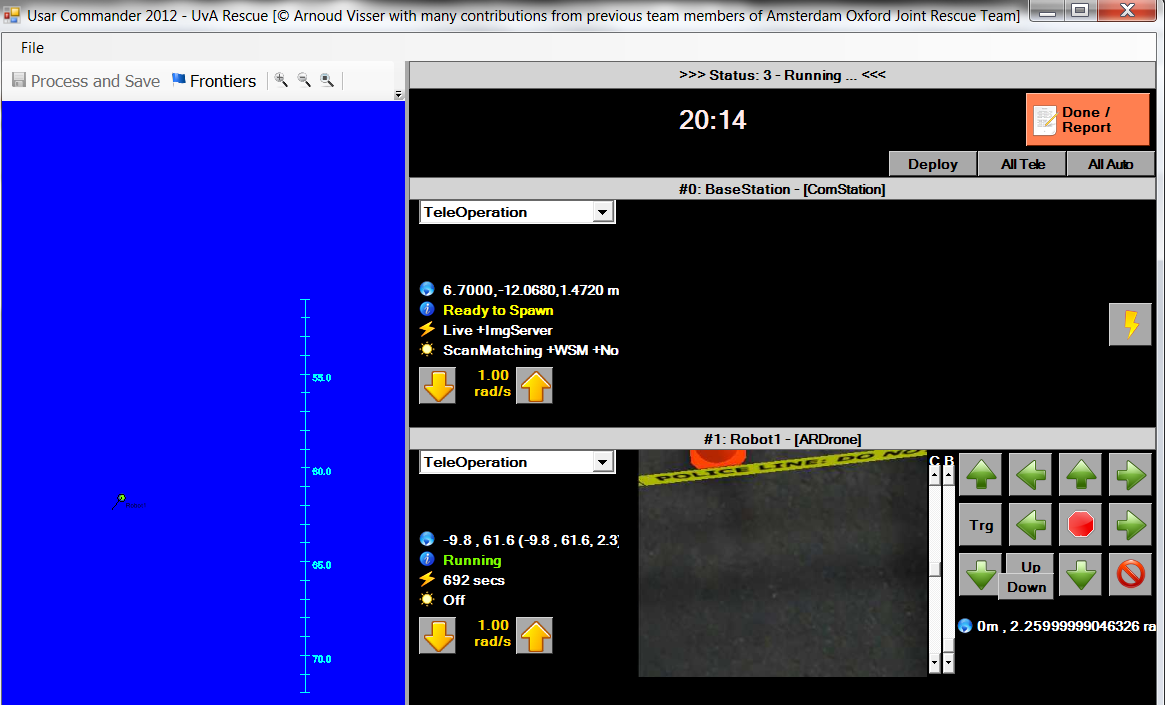
- With the ImageServer working, I got the camera view in UsarSim (bottom camera):
Submitted Rev. 2800.
- nb-ros got wet and doesn't start up. Hopefully drying will help.
- Found the NISTStatic.usx and NISTTextures.utx on my backup drive. Only remaining error is missing chair in USARMasterStatic.usx (my version was June 23, 2006).
April 4, 2013
- Downloading the UT2004-lnxpatch3369 and the ut2004-ECEBonusPack for Linux. Following the instructions of the forum, I only have to add my key to UT2004_PATH/System/cdkey.
- Installed ut2004. Unfortunatelly, I have to wait until I am connected to the internet until I can install libstdc++5.
- Need a USB3-Ethernet-adapter. The version of Digitus is 29 euro but white, while the one from StarTech is 65 euro and black. Both without Linux drivers! Chipset manufacturer has some drivers: V1.3.0 for ASIX AX88179. Even an V1.4.0 (Feb 2013).
April 3, 2013
- Could start roslaunch atlas_utils atlas.launch after source /usr/share/drcsim/setup.sh.
- The launch files are in /usr/share/drcsim-2.2/ros/atlas_utils/launch/
- Performed a roslaunch atlas_utils qual_task_1.launch successfully, but should first follow a tutorial about camera management.
- Started a system monitor. All four cores were at 80%, but now gazebo crashes. Memory usage is only 2 of the 8 GB. Without the monitor gazebo still starts.
April 1, 2013
- Followed the instructions to Install DRC, which boils down to a simple sudo apt-get install drcsim. Result is 7 new packages and 49 upgraded packages. The new package are for instance the sandi-hand and the packages for the pr2.
March 31, 2013
- Installed UT2004 from disk on nb-udk. Installed patch 3369, followed by the 64 bits variant. Continued with the Editor's Choice Bonus pack (v1.1). Installed unwheel_msu followed by unwheel_ec (in that order).
- Following the instructions at the manual, I changed UT2004 tempory to usarsim and did export CVSROOT=:ext:physar@usarsim.cvs.sourceforge.net:/cvsroot/usarsim;cvs co usarsim from my cygwin shell (with cvs installed).
- Installed AAA_MapBaseFiles_V3.31.exe and DM-RoboCup06Worlds_V3.31.exe. Modified DM-CompWorldDay5c.bat to start as 64bits. Doesn't start. Tryied Day5b, but got error messag "Can't find file for package D3D9Drv".
- Doesn't start because I didn't do make.bat in System. Failed on missing ..\Textures\USARSim_Vehicles_Textures.utx. Installing USARSimBaseFiles_3.37.exe solved this issue.
- make.bat still failed on 4 errors: missing Static mesh for ARDroneBody, LeggedRobots HOAP dummy and Vehicles WAMArm.
- Copying USARSim_ARDrone_Textures and _Meshes solved the issue with the ARDroneBody, but still 4 errors.
- The Barett WAMArm is a project of Derek Burch from the University of California, Merced.
- Linked the ARDrone to the right Texture and Meshes (Vehicle->ARDrone). Still had Problems with PioneerArm, HOAP, Bumbelbee and WAMArm. Moved those files one directory up and I could compile (and Day5c starts). The 32bits Day5b has still the same failure (D3D9Drv).
March 29, 2013
- Could connect to Kenaf with usarsimKenaf.launch file. Had to remove encoder because I get warnings about messages without name (looks like every sensortype has to be initialized with UsarSimList). Have to test teleop_twist_keyboard and gmapping. keyboard works. Mapping also works, although I would not be surprised if the scans are mirrored (couldn't recognize map).
March 27, 2013
- Continue with adrone_tools setup.
- Had also to install the standalone tools with sudo apt-get install python-rosinstall python-rosdep python-pygame, otherwise rosmake and rosdep doesn't work.
- Couldn't perform a rosmake because ~/.ros was from root. Moved it to tmp and a made a personal copy. Now rosmake works.
- Finished also ardrone simulation setup, and was able to control an ardrone in Gazebo.
- Continued with usarsim-code. Performed a rosmake usarsim_inf. Failed on missing control_msgs package. Performing a sudo apt-get install ros-fuerte-control solved the issue.
March 26, 2013
- Started with Waterfront and TallTestWorld at nb-unreal. Both failed (but steam was still updating at that time). spqrSoccerWorld worked. Added InsTest to AR.Drone.
- When I started usarsim_node, I got the addition rostopics cmd_vel, joint_states, tf. Position Robot1 was unknown, so I got a UT-character. Only one named position: PlayerStart. Seems that this position is too low.
- The new nb-ros has arrived. As indicated at the forum by Jacques, the wireless is unstable (and no ethernet connector so solved it wired). I also have a Cisco router (EFC3925). Switched off the n-protocol with the commands:
echo "options iwlwifi 11n_disable=1" | sudo tee /etc/modprobe.d/iwlwifi.conf
sudo modprobe -rfv iwlwifi
sudo modprobe -v iwlwifi
- After this change the network was stable enough to download the rest of ros-fuerte-desktop-full.
`
March 25, 2013
- After the session at the IMAV Hacketon at the Dutch German Wind Tunnel, I did git clone git://git.code.sf.net/p/usarsimros/code usarsimros-code in ROS/packages, followed by a make in usarsim_inf.
- Connected to P3AT running in IranOpen2012semi. Don't see camera-tile. Ros side complained about
- Unknown Conf type Camera
- Ignoring transform from child_frame because of nan value in transform (all rotations).
- Got status from GndTruth while expecting InsTest.
- Continued with ROS navigation stack. Installed sudo apt-get install ros-fuerte-brown-remotelab and ros-fuerte-slam-gmapping. Called rosrun teleop_twist_keyboard teleop_twist_keyboard.py and could navigate (robot only stops moving when asked).
- Also started rosrun gmapping slam_gmapping scan:=lms200 _odom_frame:=odom and saved after 6 nodes (157 scans) with command rosrun map_server map_saver:

March 4, 2013
- Logged in under Linux-Mint on pc-udk. Followed Gazebo starting tutorial. Could do roslaunch gazebo_worlds empty_world.launch, but get response [gazebo_worlds] is not a package or launch file name. Checked /usr/share/drcsim-1.3/worlds/ and found 8 worlds.
- First tried the powerplant world, but the launch-file wasn't found. Found a working configuration roslaunch atlas_utils atlas_no_controllers.launch.
February 22, 2013
January 30, 2013
January 22, 2013
January 11, 2013
- Installed version 310.90 from Nvidia (which again solves some startup problems with UT3). I did it in advanced mode, which updated only the graphical and 3D drivers (not the PhysX drivers). I will check if the IranOpen will start again in 64bits.
Yes, the 64bits version works again.
January 9, 2013
January 4, 2013
- Tried the same setup with UDK-2012-05. Now I get three camera-tiles (next to each other). The conversation is stopped (new code), but no new conversation is started when I brought robot1 in range of robot2.
- No new conversation is requested, because the operator thinks that it is still connected (while the connection is cleared in NotifyConversationStopped). Added additional print statements. Extracted Sanaz' Multiview.uc in UDK-2012-05.
- Still good camera-tiles in UDK-2012-05. Drove Robot2 out of range and back. All the time I got the message that Robot2 still thinks that it is connected to the BaseStation (and vise versa) (CloseConversation not seen).
Maybe I should add a reconnect button! I am out of memory.
January 3, 2013
- Found nothing wrong with config. 32bits version works fine with -d3d11. Still no images visible.
- Drove robot2 out of range (-93.6 dBm). Got warning 'Exception while trying to send message', System.IO.IOException, connection broken. That should be the connection to the BaseStation. Could still control robot through Robot1.
- Checked the code. The conversation should be restarted when back in range. Added some debug-strings.
- Restart doesn't happen because the connection is still there (although the socket is broken). Now I stop the conversation on error (maybe should only do that for this specific error). First see if it works (but I get kicked out by WSS).
January 2, 2013
- Updated UsarSim and downloaded Sanaz patch. Had to update Envy_Effects.upk to run IranOpen2012semi without warnings.
- Didn't get any images in my GUI, but that is possible due to the config.
- Strange enough, the 64bits verion of IranOpen doesn't start (thought I solved that issue with the Nvidia-patch).
Labbook 2012
Labbook 2011
Labbook 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004