Wishlist
- 3D user-interface (open)
- 3D-Mapping (open
- Joint Rescue Forces list of tasks
- small tasks
- Reconnect when in range
- Use status message to select view.
Started
Labbook 2016.
June 11, 2015
May 18, 2015
May 13, 2015
- Continue to install the SIGVerse server following the steps of the tutorial. Xj3D is described at the web3d website.
- Checked out the v1.0 source code with svn, but this is use. According to NPS developers, this is a an orphaned version.
- make of SIGVerse v2.2.2 fails on missing jni.h. Copied this from jvm/java-1.6.0 to /usr/local/include, as specified in the 2nd step of the tutorial.
- Added SHELL = '/bin/bash' to the Makefile of server/commonlib, to allow the usage of popd and pushd (instead of cd). make install creates a sigverse-2.2.2 in my home-directory.
- Started sigserver.sh from there gives the correct:
[SYS] ///////////////////////////////////////////////////////////
[SYS] ////////////// World number 0 (port 9000) ///////////////
[SYS] ///////////////////////////////////////////////////////////
[SYS] data directory :
[SYS] [1] /home/arnoud/sigverse-2.2.2/share/sigverse/data/xml/
[SYS] [2] /home/arnoud/sigverse-2.2.2/share/sigverse/data/shape/
[SYS] world file : MyWorld.xml
[SYS] building entity (entName=(Robot-nii), className=(Robot), X3DFileName=(/home/arnoud/sigverse-2.2.2/share/sigverse/data/shape/robot_nii_v2.x3d))
- Found the mentioned jar at vrspace.org.
May 1, 2015
April 20, 2015
March 29, 2015
- Looking at YouBotBaseKinematicsTest.cpp in youbot_driver.
March 19, 2015
- Looked at sun and ground_plane models. Groundplane has a collision link, which is not needed for player_start. In /usr/share/gazebo-4.1/media/materials several materials for the visual can be found. For instance, the following Reds are available:
- gazebo.material:material Gazebo/Red
- gazebo.material:material Gazebo/RedBright
- gazebo.material:material Gazebo/RedGlow
- gazebo.material:material Gazebo/RedTransparentOverlay
- gazebo.material:material Gazebo/RedTransparent
For Blue two additional colours are available:
- gazebo.material:material Gazebo/SkyBlue
- gazebo.material:material Gazebo/BlueLaser
March 18, 2015
- Implemented a simple C++ version of USARGazeboStream. Could make a connection, but socket is closed before NFO message could be written.
March 17, 2015
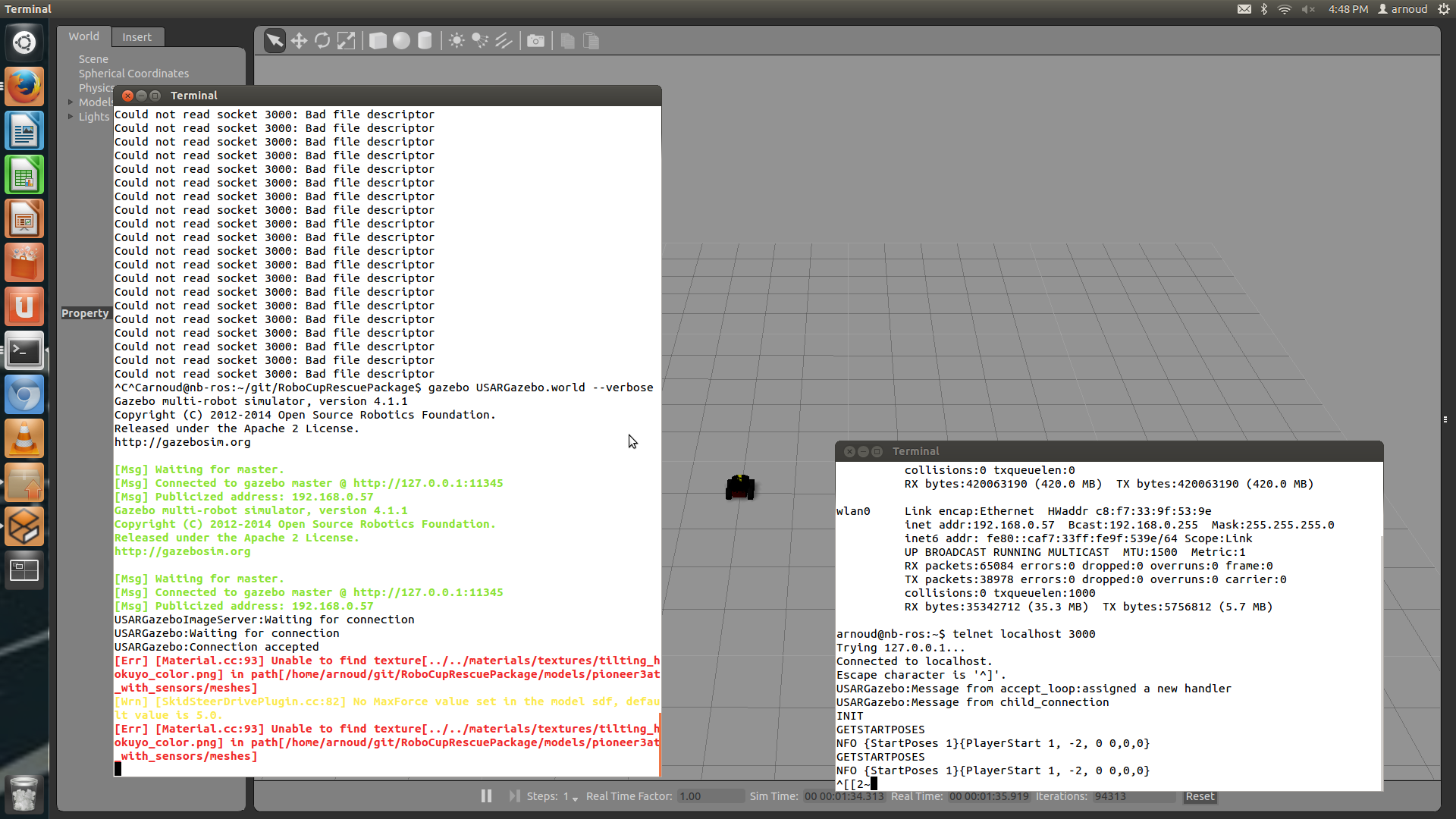
- Tested the RoboCupRescuePackage as created by Masaru Shimizu. The version of March 13 responds with spwawning a Pioneer robot for each message, so it fails when USARCommander asks for the SpawnPositions:
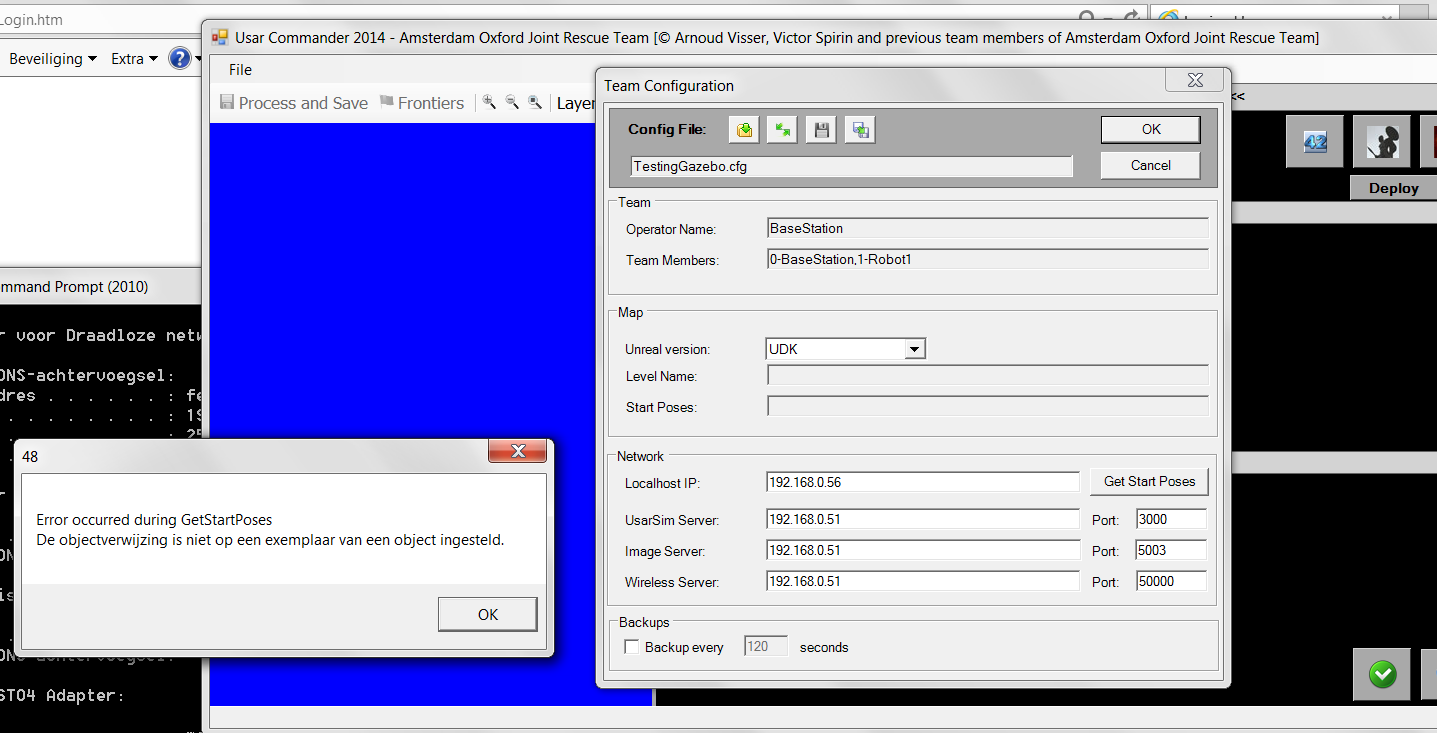
- Added functionality to handle a GETSTARTPOSES request. Tested with telnet on a Linux machine it works, but USARCommander it fails. Should check the extra carrier return given by robot controllers like USARCommander:
Commited this version.
- Should read some Gazebo documentation:
- Write a Plugin
- Development
- Transport Library
- The USARGazebo is a WorldPlugin, where I expected a SystemPlugin. The SystemPlugin is useful for modifications in the GUI.
- Tried to install the webserver plugin, but failed on "gzweb/node_modules/.bin/node-gyp: No such file or directory". The suggested npm config set registry http://registry.npmjs.org/ didn't help.
- Gazebo uses Boost ASIO to manage the communication layer, and Google Protobufs are used as the message passing and serialization library.
Labbook 2014
Labbook 2013
Labbook 2012
Labbook 2011
Labbook 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004