Wishlist
- 3D user-interface (open)
- 3D-Mapping (open
- Joint Rescue Forces list of tasks
- small tasks
- Reconnect when in range
- Use status message to select view.
Started
Labbook 2017.
November 9, 2016
September 22, 2016
- I had a discussion with Efstratios Gavves. I told me about the Unreal Torch plugin for the Unreal Engine 4. This plugin support for embedded Lua/Torch scripts in the game engine loop, and a set of Lua APIs for providing user input, taking screenshots and segmentation masks, controlling game state, running faster than real time, etc. Torch is an AI Research platform that is focused on deep learning.
- Should make a Computer Science graduation project to couple this to Freddy's work.
July 4, 2016
- After getting the BB8 working in Gazebo, I installed the RoboCup2016 maps in /usr/share/gazebo-5.3/worlds.
- Starting gazebo_ros empty_world.launch failed.
- Did a git pull. Had to do the both the cmake and make in the RoboCupRescuePackage itself. After that gazebo --verbose USARGazebo.world works.
- Yet, roslaunch gazebo_ros empty_world.launch world_name:=USARGazebo.world still fails.
June 29, 2016
- Repeated the procedure on a fresh machine (training-center left). Only performing sudo prime-select intel was not enough (error: alternatives not set up properly). Installing the proprietary drivers (352.63) from Nvidia by the Alternative drivers procedure solved this.
- The guy from Tuxedo had even a better procedure. The trick is to change in the BIOS (Advanced ChipSettings) the GPUsetting from MSHYBRID to DISCRETE. That removes the need to edit the grub-menu, and gives access to all 8 CPU-cores and the NVIDIA card.
June 28, 2016
- The Tuxedo laptops at the Rescue Venue have the following configuration: i7-6700HQ and GTX 970m.
- The Tuxedo laptops have Ubunutu 16.04 installed, because they experienced problems with the graphic cards with the Ubuntu 14.04 installation. According to askubunutu, this seems solvable.
- Starting to download an image of Ubuntu 14.04.04. Luckely it is only 1Gb big, so it fits on my ICRA stick. Aborted the download, because I received a stick from the Soccer Simulation League.
- Had to change the boot-order in the BIOS (hitting F1,F2,F3 in sequence).
- Edited in grub the Install Linux entry, by adding nomodeset to the linux line. Hit F10 to continue the installation.
- Selected the option to install 14.04 alongside 16.04. Choose all default options.
- Changed the boot-options from default choice (Ubuntu), to reflect that it is 14.04. Those changes are not saved, because grub is not listening to ctrl-strokes.
- Gives login screen, but stops directly to listen to the keyboard and mouse (and holds). No problems with graphics drivers, as far as I can seen (because computer is stuck). The 16.04 installation still works.
- The keyboard problem was due to the graphics card. Adding both acpi=off noapic solved this, yet the system is now working with its Skylake Halo GT2 instead of the Nvidea GTX 970M.
- Made the change permanent by editing the GRUB_CMDLINE_LINUX_DEFAULT option in /etc/default/grub.
- Installed the latest stable NVIDIA drivers from the NVIDIA short lived branch (nvidia-364), as suggested by askubuntu. That was a wrong choice, because the last comment reported problems with that kernel (and suggested instead to use the nvidia-361 kernel).
- Tried to boot again, this time without the noapic option. Freeze.
- Tried again, now with the apci=off off. Black screen.
- Both off. Logs in, but with black screen.
- Both on, still black screen.
- Installed Ubuntu 14.04 again (partitions get every time 2x smaller). Didn't dare to use the advanced partitioning tool). Now installed nvidia-361 and run nvidia-xconfig before rebooting.
- Still black screen, which I could circumvent with the combination CTR+ALT+F1, which gives login-terminal. Removed nvidia* and installed nvidia-355. Should try to add noveau.modeset=0 to the linux-line of grub.
- No effect, so I tried another approach: upgrade the kernel as suggested by askubuntu. This has some effect: Starting LightDM Display Manager, stop sending event that Plymouth is up, intel_dp_aux_ch: dp aux hw don not signal time out.
- Upgraded to kernel-4.3.6. Upgraded from nvidia-355 to nvidia-361, but still nomodeset is needed. Next is v4.4.8-wily.
- Because it is working in 16.04 (Xenial), I will try v4.4.14-xenial.
- After the update to xenial, the systems starts without nomodeset, yet no nvidia-card is visible. Upgrading from 361 to 367. Still the nvidia-card is not visible.
- Typing lspci -v shows that my GTX 970M is visible, although its Capabilities are denied (solved by adding sudo). As next step I checked dmesg | grep nvidia, which indicated that nvidia-prime terminated with status 127.
- Followed the hint of askubunut and installed with the run script from nvidia. Installation was incomplete because the kernel was already up to date. This left the stage of installation half-way. Rebooting resulted in a xserver-loop. Tried to solve it by installing xubuntu, switching from lightdm to gdm, etc, but the result got worse. At the end removed both 14.04 partitions.
- Converted the stick to Wily (15.10), which should work with Gazebo6 and Ros Jade. At the same time Francesco is testing Gazebo7.2 with Ros Kinetic.
- Even with Wily the boot didn't work. Starting with nomodeset I got the details that Gallium was found.
- Downloaded Nvidia run-package. Trick to switch off xserver was sudo service lightdm stop. Still, black screen.
- After a lot of trouble I had control again of Wily: advanced ubuntu, upstart with nomodeset added to linux-line. Did a sudo apt-get update, which updated lightdm, xserver-xorg-core and linux-firmware.
- A positive post suggested to do the nvidia installation from Preferences|Additional drivers. Should try after a purge nvidia*
- Tried to come back in control, but even with noapic apci=off nomodeset the login freezes. Removed the partition with Gparted.
- Could start with nosetmode. The /var/crash filew as from linux-generic (kernel). Changed the nouveau-display driver to nvidia-352.63. The package nvidia-prime was already installed.
- Checked with lspci -v and dmesg, but only warning was about the drm of nvidia tainting the free kernel. Did a nvidia-xconfig and a sudo prime-select nvidia and rebooted.
- Black screen, but control with F1. Did a sudo prime-select intel; service lightdm stop; service ligthdm start. Result is working xserver with Intel graphics. sudo prime-select intel; service lightdm stop;: system freezes. Tried again. This time the system nicely booted (without any editing of the linux-line). This was due to the prime-select intel (I hope). Crash was actually in /var/run/lightdm ... -novtswitch.
- Did a sudo apt-get update; upgrade (hoping up an improved lightdm).
April 7, 2016
April 6, 2016
March 16, 2016
- pc-unreal survived its fall, and is still functional. Found several interesting install packages, and copied them the FreeCom stick.
- For UT3 there are several maps, although nearly all seem to be also on svn.
- For UDK there are only three maps: ExampleMap, ImprovedTestRoom and VMAC2011.
March 11, 2016
- DM-Arda has the same start-script as the Black Arena on nb-unreal (and nb-udk_, but also failed a second time with "Can't find file for package D3D9Drv". Had the same problem in 2013. Solved it by modifying Usarsim.ini (RenderDevice from D3D9 to D3D).
March 10, 2016
- Made some nice pictures of the Black Arena at nb-udk:
- Failed to run the Yellow Arena on nb-udk:
UT2004 Build UT2004_Build_[2005-11-23_16.22]
OS: Windows NT 6.1 (Build: 7601)
CPU: GenuineIntel PentiumPro-class processor @ 2795 MHz with 4095MB RAM
Video: NVIDIA GeForce GT 525M (4752)
Assertion failed: GIsEditor || GetSuperClass() || this==UObject::StaticClass() [File:.\UnClass.cpp] [Line: 881]
History: UClass::Bind <- (Class DM-USAR_yellow_250.VictRFIDTag0) <- ULinkerLoad::CreateExport <- (VictRFIDTag0 14526) <- IndexToObject <- ULinkerLoad<
- DM-Arda failed on nb-unreal with "Can't find file for package D3D9Drv".
March 3, 2016
- Downloaded husky_launch.zip from the The Construct blog. Unzipped it into catkin_ws/src, but catkin_make didn't see the CMakeLists.txt.
- Performed roslaunch husky_launch main.launch, but the response was 'ResourceNotFound: husky_gazebo'
- Tried to install apt-get install ros-indigo-husky-gazebo, but this depends on ros-indigo-gazebo-plugins
March 1, 2016
February 29, 2016
- Masaru uses in is start_all.launch usarsim_inf to to be able to connect ros to his interface.
February 28, 2016
- pc-unreal still works, although it runs Windows-XP. It also has a Suse Linux 10.1 partition. On the system drive only 1.36 Gb is left, but on scratch there is still 28.3 Gb available.
- Downloaded Ubuntu 14.04 LTS on one of the ScanDisks, so that I can reboot from that disk. First checked if Windows could read the disk of 32Gb. The download is 1.1 Gb.
- Shutdown is slow with 53 updates to be installed. I used pc-unreal for rescue the last time on November 18, 2011.
- Continuing with usarsimros. Following Catkin CMakeLists.txt tutorial. Should look how to migrate from rosbuild.
- Made a fresh workspace with the beginners_tutorial and usarsimros-code by the commands catkin_create_pkg beginner_tutorials std_msgs rospy roscpp and catkin_init_workspace. Removed all unneeded bin, Makefiles, etc. Renamed the manifest.xml to package.xml. Made the modifications where catkin complained about (based on beginner_tutorials/package.xml). Made the modifications on CMakelist.txt inspired by beginner_tutorials. Finally I receive:
[100%] Building CXX object usarsimros-code/usarsim_inf/CMakeFiles/usarsim_node.dir/src/usarsim.cpp.o
In file included from /home/arnoud/catkin_usarsimros_ws/src/usarsimros-code/usarsim_inf/src/usarsimInf.hh:34:0,
from /home/arnoud/catkin_usarsimros_ws/src/usarsimros-code/usarsim_inf/src/servoInf.hh:44,
from /home/arnoud/catkin_usarsimros_ws/src/usarsimros-code/usarsim_inf/src/usarsim.cpp:32:
/home/arnoud/catkin_usarsimros_ws/src/usarsimros-code/usarsim_inf/src/usarsimMisc.hh:42:37: fatal error: usarsim_inf/SenseObject.h: No such file or directory
#include
^
compilation terminated.
- Missing file is in ./usarsim_inf/msg_gen/cpp/include/usarsim_inf/SenseObject.h. Now it compiles. Next error message is about Linking:
[100%] Building CXX object usarsimros-code/usarsim_inf/CMakeFiles/usarsim_node.dir/src/usarsim.cpp.o
Linking CXX executable usarsim_node
CMakeFiles/usarsim_node.dir/src/usarsim.cpp.o: In function `rosThread(void*)':
usarsim.cpp:(.text+0x1d): undefined reference to `ServoInf::msgIn()'
CMakeFiles/usarsim_node.dir/src/usarsim.cpp.o: In function `main':
usarsim.cpp:(.text+0x1c2): undefined reference to `ServoInf::ServoInf()'
usarsim.cpp:(.text+0x1db): undefined reference to `UsarsimInf::UsarsimInf()'
usarsim.cpp:(.text+0x2d9): undefined reference to `ulapi_init(int)'
usarsim.cpp:(.text+0x3f3): undefined reference to `ServoInf::init(GenericInf*)'
usarsim.cpp:(.text+0x406): undefined reference to `UsarsimInf::init(GenericInf*)'
usarsim.cpp:(.text+0x40b): undefined reference to `ulapi_task_new()'
usarsim.cpp:(.text+0x414): undefined reference to `ulapi_prio_lowest()'
usarsim.cpp:(.text+0x431): undefined reference to `ulapi_task_start(void*, void (*)(void*), void*, int, int)'
usarsim.cpp:(.text+0x442): undefined reference to `UsarsimInf::msgIn()'
usarsim.cpp:(.text+0x54e): undefined reference to `GenericInf::getNH()'
usarsim.cpp:(.text+0x563): undefined reference to `ulapi_exit()'
collect2: error: ld returned 1 exit status
- Added the files from the usarsim_inf library. ulapi.cpp, genericInf.cpp, servoInf.cpp, usarsimMisc.cpp, simware.cpp compile fine. Problem is in servoInf.cpp:
1325:34: error: ‘usarsim_inf::ToolchangerStatus’ has no member named ‘tool_name’
sw.name = effector->status.tool_name;
- Could not find the tool_name in msg_gen/cpp/include/usarsim_inf/ToolchangerStatus.h, so commented out reference to tool_name (should generate new msgs?). The library is now build, missing is reference to actionlib and tf (as indicated in the package.xml, but not in the CMakefile.txt
- Made a new package with command catkin_create_pkg pkg_with_messages tf geometry_msgs nav_msgs actionlib sensor_msgs control_msgs. Adding those suggestions to package.xml and CMakelist.txt solves the issue, the code is made.
- Checked the Msg creation tutorial: I should also add message_generation to those two files.
- Started on nb-udk DutchOpen20120Final from UDK-2012-05. Could check with telnet 192.168.178.19 3000; GETSTARTPOSES that it has startPosition Robot1-8. Started roslaunch usarsim_inf usarsimP3AT.launch hostname:=192.168.178.19 startPosition:=Robot1, but failed because ROS_MASTER_URI is http://localhost:11311, which gave earlier problems. Should check NetworkSetup.
- Did export ROS_HOSTNAME=192.168.178.19; export ROS_MASTER_URI=http://192.168.178.19:11311. Still crash. Checked log. Problem was that I runned the ~/ROS/indigo_setup.sh, instead of the ~/catkin_usarsimros_ws/devel/setup.sh, so the old usarsim_node in ~/ROS/packages was launched. In the correct workspace roslaunch usarsim_inf usarsimP3AT.launch hostname:=192.168.178.19 startPosition:=Robot1 complains about tweety, which means that hostname and startPostion are not overruled.
- With roslaunch usarsim_inf myP3AT.launch I get:
arnoud@nb-ros:~/catkin_usarsimros_ws/src/usarsimros-code/usarsim_inf$ roslaunch usarsim_inf myP3AT.launch
... logging to /home/arnoud/.ros/log/f926de74-dc0a-11e5-8856-c8f7339f539e/roslaunch-nb-ros-7959.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://192.168.178.39:50424/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.16
* /usarsim/hostname: 192.168.178.19
* /usarsim/odomSensor: GndTruth
* /usarsim/port: 3000
* /usarsim/robotType: P3AT
* /usarsim/startPosition: Robot1
NODES
/
RosSim (usarsim_inf/usarsim_node)
ROS_MASTER_URI=http://192.168.178.39:11311
core service [/rosout] found
process[RosSim-1]: started with pid [7977]
[ERROR] [1456696390.080545089]: Unknown conf type Camera
Error: TF_SELF_TRANSFORM: Ignoring transform from authority "unknown_publisher" with frame_id and child_frame_id "" because they are the same
at line 217 in /tmp/binarydeb/ros-indigo-tf2-0.5.12/src/buffer_core.cpp
Error: TF_NO_CHILD_FRAME_ID: Ignoring transform from authority "unknown_publisher" because child_frame_id not set
at line 223 in /tmp/binarydeb/ros-indigo-tf2-0.5.12/src/buffer_core.cpp
Error: TF_NO_FRAME_ID: Ignoring transform with child_frame_id "" from authority "unknown_publisher" because frame_id not set
at line 229 in /tmp/binarydeb/ros-indigo-tf2-0.5.12/src/buffer_core.cp
[ERROR] [1456696390.621569652]: Got status for INS sensor "InsTest" but have not yet received status for expected ground truth sensor "GndTruth"
- The P3AT landed nicely on StartPosition Robot1:

- Uploaded correct package.xml and CMakeLists.txt.
- Yet, according to a forum-post of kr1zz still a lot has to be done to control a P3AT around.
February 27, 2016
- The Iros 2009 USARSim workshop is only to reach via the Wayback Machine.
- Found the ICRA 2006 workshop on the USARSim MOAST inferface (including v2.1 of the USARSim manual).
- Also found the schedule of the IROS 2004 workshop.
- Added user workspace to pc-udk. Could login on the terminal, but not via the login screen (or Switch user screen). Performing sudo apt-get install ubuntu-session solved this issue.
- Updated from 14.04.02 tot 14.04.04. This version has already many ros-indiogo packages.
- Did sudo apt-get autoremove: many of the links in grub seems to be broken. Performed sudo update-grub (already edited /etc/default/grub and enabled the saved method).
- Finished the workshop installation instructions (day0).
February 26, 2016
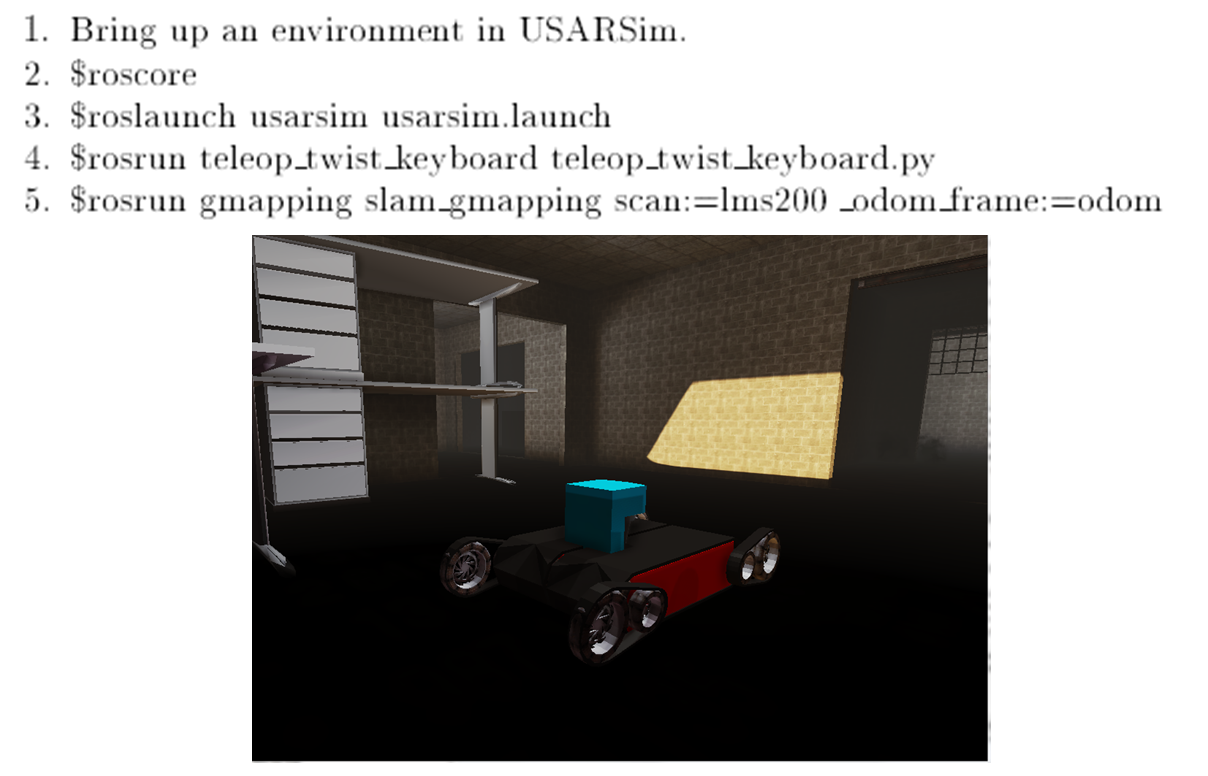
- Preparing a short USARSimROS tutorial based on wiki on sourceforge.
- Worked on it in March 25, 2013, based on ROS fuerte. Had in May 23 problems with compiling usarsim_joint_gui with a Java maven-plugin.
- ~/ROS/fuerte_setup.sh is a broken link, I only have hydro or indigo in /opt/ros.
- Updated my usarsimros-code directory. Teddy Weisman had still updated it until Augustus 2013 (mainly the robotarm).
- Tried to make a catkin_make CMakelist.txt, but my project is ignored. Should follow the cmake tutorial.
- In ~/ROS/packages, just typing cmake . failed. Same for make in build
- Will look first at the presentation. Found it on nb-udk:
February 22, 2016
- Following the instructions of Team Vigir. A prerequisite is the installation of drcsim, which fails on dependencies on gazebo4.
- Executed command grep Broken /var/log/dist-upgrade/apt.log, but I have many broken dependencies (1261 lines). Serious looks the conflict between libboost1.54-dev and libboost1.46-dev. Another conflict is between libopenmip1.6 and libopenmpi1.3.
February 19, 2016
- The current version of Ubuntu is now 14.04.4 LTS. Check the .4 version on nb-ros.Checked with command lsb_release -a and version is 14.04.03 (although aptitude upgrade is still busy). When the upgrade is ready the version is 14.04.04.
- Performed a aptitude remove ros-indigo-desktop-full, followed by a aptitude remove ros-indigo-desktop. Now aptitude install ros-indigo-gazebo7-ros-pkgs gives an confict between libxerces-c-dev and 2.8.0+deb1-3build1. Removing libxerces-c2-dev solved this issue.
- Installing aptitude install ros-indigo-gazebo7-ros-pkgs failed because ros-indigo-gazebo7-plugins was virtual, but aptitude install ros-indigo-gazebo7-ros seems to work, and installs both gazebo7. Not clear if ros-indigo-gazebo7-ros-pkgs is needed.
- So, removed ros-indigo-gazebo7-ros and installed ros-indigo-gazebo5-ros-pkgs. Corrected the installation page.
-
- Continued with Installing the RoboCupRescuePackage.
- Went to ~/git/RoboCupRescuePackage and did a git pull.
- Changed .bashrc.USARGazebo from hydro to indigo.
- Commanded gazebo USARGazebo.world and saw an empty world with a box.
- Telnet couldn't connect to port 3000. Is this a firewall problem or is the plugin not loaded? Forget to build!
- Make failed on No rule to make target `/usr/lib/libboost_system-mt.so', needed by `libUSARGazebo.so'. Created a new build directory, which solved the issue. Had to comment out line 437 of USARGazeboStream (just a logmessage).
- Continued with the RoboCup2012 world. Got a bind error, but that is because both the plugin was loaded twice (lines 36-42 in the world file). Got the RoboCup2012 world, but my nb-ros crashed completely (full restart).
February 8, 2016
- Matlab R2015a is still working under Ubuntu 14.04.
- Following the instruction to install ROS Indigo:
-
- sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list' (commented out during update from precise (12.04) to trusty (14.04)
- sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116 (no change, was still up to date).
- Performed sudo apt-get update
- Performed sudo apt-get install ros-indigo-desktop-full, which returend an error due to a conflict between libyami-cpp-dev and libyami-cpp. Unfortunatelly, this is a difficult problem to solve. Solution was to dpgk -r yaml-cpp
- Continue with the instruction to install Gazebo:
- sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list'
- wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add -
- sudo apt-get update
- sudo apt-get install gazebo7 which fails, based on broken dependencies. Installed ros with aptitude, so performed sudo aptitude full-upgrade, which upgraded gazebo2 (with upgrades from osrfoundation.org I presume). If I perform sudo aptitude gazebo7, the suggestion is to deinstall gazebo2 and ros-full-desktop.
- I assume that I have to follow the instructions at gazebosim and
leave for the moment the ros-indigo-gazebo4-ros-pkgs, ros-indigo-gazebo5-ros-pkgs and ros-indigo-gazebo6-ros-pkgs alone.
- Tomorrow I will try to continue with Installing the RoboCupRescuePackage
February 3, 2016
- do-release-upgrade has found that I modified /etc/modprobe.d/iwlwifi.conf. I had disabled the option IEEE 802.11n (with options iwlwifi 11n_disable=1), while the new configuration suggest to either load iwldvm or iwlmvm depending on the microcode installed on the system. The suggestion is to remove first iwl?vm and the iwlwifi with the line remove iwlwifi \ (/sbin/lsmod | grep -o -e ^iwlmvm -e ^iwldvm -e ^iwlwifi | xargs /sbin/rmmod) \ && /sbin/modprobe -r mac80211. I will keep my old /etc/modprobe.d/iwlwifi.conf. The rational for the new code for the Intel Wireless driver can be found in this linux-wireless post. With modinfo iwlwifi and modinfo iwldvm as indicated by askubuntu. I actually have a Intel Centrino Advanced-N 6235 Wireless chip, with the current configuration 802.11abg. Yet, it seems from its name that it should be able to support 802.11ang, which could make use of the advanced ANG-modules iwlmvm or iwldvm of the iwlwifi.
- Chose the new gnome/default settings and the init.d/casper service.
- Also the /etc/NetworkManager/NetworkManager.conf had new settings (new plugin ofono set by plugins=ifupdown,keyfile,ofono and no no-auto-default=9C:EB:E8:16:45:42. Chose the original NetworkManager.conf. Ofono is meant for mobile phones.
- I have Ubuntu 14.04 LTS (with working network!) on my Dell XPS 13 Development version (Sputnik project). Major change is the color of the sitebar:

February 2, 2016
- Upgrading nb-ros to Ubuntu 14.03.3 LTS.
- Some third party entries in your sources.list were disabled. Re-enable them after the upgrade with the software-properties tool or your package manager.
- Ubuntu couldn't calculate the size of the upgrade, due to unofficial software packages not provided by Ubuntu.
- The upgrade manager gives the following list of other software:
- http://archive.canonical.com/lucid partner
- http://ppa.launchpad.net/ubuntu-toolchain-r/test/ubuntu precise
- http://linux.dropbox.com/ubuntu precise
- http://ppa.launchpad.net/timn/clips/ubuntu precise
- http://ppa.launchpad.net/fkrull/deadsnakes/ubuntu precise
- http://dell.archive.canonical.com/updates/precise-dell public
- http://packages.osrfoundation.org/gazebo precise main
- http://ppa.launchpad.net/texlive-backports/ppa/ubuntu precise main
- http://packages.ros.org/ros/ubuntu precise main
- http://repo.steampowered.com/steam/ precise steam
- http://private-ppa.launchpad.net/commercial-ppa-uploaders/steam/ubuntu precise
- http://ppa.launchpad.net/webupd8team/java/ubuntu precise main
- http://ppa.launchpad.net/canonical-hwe-team/sputnik-kernel/ubuntu precise main
- Received an error the upgrade, with the explanation that some packages have umet depedencies.
- Performed the upgrade from the commandline with apt-get dist-upgrade. 43 packages will be upgraded, 6 will be newly installed. No success.
- Executed sudo dpkg --get-selections | grep hold and found that ros-hydro-household-objects-database-msgs was the package that caused the break (this maybe caused by held packages). Removed the package by sudo apt-get remove ros- hydro-household-objects-database-msgs. After an additional sudo apt-get update this seems to solve the issue (but actually failed a bit later). Also did an additional sudo apt-get autoremove.
- The logfile can be inspected from /var/log/dist-update.
- Removed all old ros-fuerte packages, followed by an apt-get update; apt-get upgrade . Performing the release-upgrade from the commandline with sudo do-release-upgrade. Still, the same error message (couldn't calculate the upgrade).
- More handy aptitude search is sudo dpkg --get-selections | grep ros-groovy. Removed all groovy-packages.
- Found the trick to look for broken installations with the command grep Broken /var/log/dist-upgrade/apt.log. Found out that many were broken. The first to be removed was libboost-mpi1.46.dev, which had as side-effect that 264 hydro-packages were removed. The command sudo apt-get autoremove deleted several other packages, such as gazebo4 and libboost-mpi1.46. Tried another sudo do-release-upgrade. Now the release-update is possible.
January 29, 2016
- Checked the impact of several old RoboCup symposium papers. RoboCup 2000 Symposium:
- Gary Au, Simon Goss, Clint Heinze and Adrian R. Pearce - RescueModel: A Multi-Agent Simulation of Bushfire Disaster Management, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 285-290 Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (7 citations)
- Toshiyuki Kaneda, Fumitoshi Matsuno, Hironao Takahashi, Takeshi Matsui, Masayasu Atsumi, Michinori Hatayama, Kenji Tayama, Ryousuke Chiba and Kazunori Takeuchi - Simulator Complex for Robocup Rescue Simulation Project - As Test-Bed for Multi-Agent Organizational Behavior in Emergency Case of Large-Scale Disaster, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 321-326, Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (7 citations)
- Yoshitaka Kuwata and Atsushi Shinjoh - Design of Robocup-Rescue Viewers - Towards a Real World Emergency System, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 159-168, Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (20 citations)
- Robin R. Murphy, Jenn Casper and Mark Micire - Potential Tasks and Research Issues for Mobile Robots in RoboCup Rescue, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 339-344, Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (43 citations)
- Masayuki Ohta, Tomoichi Takahashi and Hiroaki Kitano - Robocup-Rescue Simulation: in Case of Fire Fighting Planning, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 351-356, Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (11 citations)
- Peter Stone, Minoru Asada, Tucker Balch, Masahiro Fujita, Gerhard Kraetzschmar, Henrik Lund, Paul Scerri, Satoshi Tadokoro and Gordon Wyeth - Overview of Robocup-2000, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 1-29, Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (4 citations)
- Tomoichi Takahashi, Ikuo Takeuchi, Tetsuhiko Koto, Satoshi Tadokoro and Itsuki Noda - RoboCup-Rescue Disaster Simulator Architecture, in "RoboCup 2000: Robot Soccer World Cup IV", pp. 379-384, Lecture Notes in Computer Science 2019, Springer, Berlin-Heidelberg, 2001. (20 citations)
- RoboCup 2001 Symposium:
- Ian Frank, Kumiko Tanaka-Ishii, Hitoshi Matsubara and Eiichi Osawa - Walkie-Talkie MIKE, in "RoboCup 2001: Robot Soccer World Cup V", pp. 191-207, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (2 citations)
- Yoshitaka Kuwata and Atsushi Shinjoh - Building User Models for RoboCup-Rescue Visualization, in "RoboCup 2001: Robot Soccer World Cup V", pp. 111-116, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (1 citation)
- Takeshi Morimoto, Kenji Kono and Ikuo Takeuchi - YabAI The First Rescue Simulation League Champion, in "RoboCup 2001: Robot Soccer World Cup V", pp. 75-99, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (11 citations)
- Ranjit Nair, Takayuki Ito, Milind Tambe and Stacy Marsella - Task Allocation in the RoboCup Rescue Simulation Domain: A Short Note, in "RoboCup 2001: Robot Soccer World Cup V", pp. 1-22, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (66 citations)
- Itsuki Noda, Tomoichi Takahashi, Shuji Morita, Tetsuhiko Koto and Satoshi Tadokoro - Language Design for Rescue Agents, in "RoboCup 2001: Robot Soccer World Cup V", pp. 125-166, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (12 citations)
- Lin Padgham, John Thangarajah, David Poutakidis and Chandaka Fernand - Team Description for RMIT-on-Fire: Robocup Rescue Simulation Team 2001, in "RoboCup 2001: Robot Soccer World Cup V", pp. 189-246, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (1 citation)
- Taku Sakushima, Tetsuya Esaki, Yoshiki Asai, Nobuhiro Ito, Koichi Wada - A Design of Agents for the Disaster Simulator on RoboCup-Rescue, in "RoboCup 2001: Robot Soccer World Cup V", pp. 205-236, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (3 citations)
- Tomoichi Takahashi, Satoshi Tadokoro, Masayuki Ohta, Nobuhiro Ito - Agent Based Approach in Disaster Rescue Simulation - From Test-Bed of Multiagent System to Practical Application, in "RoboCup 2001: Robot Soccer World Cup V", pp. 63-74, Lecture Notes in Computer Science 2377, Springer, Berlin-Heidelberg, 2002. (45 citations)
- RoboCup 2002 Symposium:
- Ranjit Nair, Milind Tambe and Stacy Marsella - Team Formation for Reformation in Multiagent Domains Like RoboCupRescue, in "RoboCup 2002: Robot Soccer World Cup VI", pp. 150-161, Lecture Notes in Computer Science 3020, Springer, Berlin-Heidelberg, 2003. (47 citations)
- Tomoichi Takahashi - RoboCupRescue Simulation League, in "RoboCup 2002: Robot Soccer World Cup VI", pp. 477-481, Lecture Notes in Computer Science 3020, Springer, Berlin-Heidelberg, 2003. (6 citations)
- RoboCup 2003 Symposium:
- Alessandro Farinelli, Giorgio Grisetti, Luca Iocchi, Sergio Lo Cascio and Daniele Nardi - RoboCup Rescue Simulation: Methodologies Tools and Evaluation for Practical Applications, in "RoboCup 2003: Robot Soccer World Cup VII", pp. 645-653, Lecture Notes in Computer Science 3020, Springer, Berlin-Heidelberg, 2004. (6 citations)
- Hiroaki Kitano - Challenges in Robust Situation Recognition Through Information Fusion for Mission Criticial Multi-Agent Systems, in "RoboCup 2003: Robot Soccer World Cup VII", pp. 35-42, Lecture Notes in Computer Science 3020, Springer, Berlin-Heidelberg, 2004. (1 citation)
- Stef B. M. Post, Maurits L. Fassaert and Arnoud Visser - The High-Level Communication Model for Multi-Agent Coordination in the RoboCupRescue Simulator, in "RoboCup 2003: Robot Soccer World Cup VII", pp. 503-509, Lecture Notes in Computer Science 3020, Springer, Berlin-Heidelberg, 2004. (12 citations)
- Kousuke Shinoda, Itsuki Noda, Masayuki Ohta and Susumu Kunifuji - Application of Parallel Scenario Description for RoboCupRescue Civilian Agent, in "RoboCup 2003: Robot Soccer World Cup VII", pp. 628-636, Lecture Notes in Computer Science 3020, Springer, Berlin-Heidelberg, 2004. (1 citation)
- RoboCup 2004 Symposium:
- Stefano Carpin and Andreas Birk - Stochastic Map Merging in Rescue Environments, in "RoboCup 2004: Robot Soccer World Cup VIII", pp. 483-490, Lecture Notes in Computer Science 3276, Springer, Berlin-Heidelberg, 2005. (18 citations)
- Çtin Meriç, I. Osman Tufanogullari and H. Levent Akin - World Modeling in Disaster Environments with Constructive Self-Organizing Maps for Autonomous Search and Rescue Robots, in "RoboCup 2004: Robot Soccer World Cup VIII", pp. 467-473, Lecture Notes in Computer Science 3276, Springer, Berlin-Heidelberg, 2005. (1 citation)
- Timo A. Nü Alexander Kleiner and Michael Brenner - Approaching Urban Disaster Reality: The ResQ Firesimulator, in "RoboCup 2004: Robot Soccer World Cup VIII", pp. 474-482, Lecture Notes in Computer Science 3276, Springer, Berlin-Heidelberg, 2005. (24 citations)
- Martijn N. Rooker and Andreas Birk - Combining Exploration and Ad-Hoc Networking in RoboCup Rescue, in "RoboCup 2004: Robot Soccer World Cup VIII", pp. 236-246, Lecture Notes in Computer Science 3276, Springer, Berlin-Heidelberg, 2005. (37 citations)
- Sanem Sariel and H. Levent Akin - A Novel Search Strategy for Autonomous Search and Rescue Robots, in "RoboCup 2004: Robot Soccer World Cup VIII", pp. 459-466, Lecture Notes in Computer Science 3276, Springer, Berlin-Heidelberg, 2005. (11 citations)
- RoboCup 2005 Symposium:
- Max Pfingsthorn and Andreas Birk - A HMI Supporting Adjustable Autonomy of Rescue Robots, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 255-266, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (11 citations)
- Stefano Carpin, Jijun Wang, Michael Lewis, Andreas Birk and Adam Jacoff - High Fidelity Tools for Rescue Robotics: Results and Perspectives, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 301-311, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (90 citations)
- Alexander Kleiner, Michael Brenner, Tobias Brär, Christian Dornhege, Moritz Göbecker, Mathias Luber, Johann Prediger, JöStü and Bernhard Nebel - Successful Search and Rescue in Simulated Disaster Areas, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 323-334, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (30 citations)
- Itsuki Noda - Consistency Management Framework for Database Used in Integrated Simulations, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 279-289, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (1 citation)
- Séstien Paquet, Ludovic Tobin and Brahim Chaib-draa - An Online POMDP Algorithm Used by the PoliceForce Agents in the RoboCupRescue Simulation, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 196-207, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (no citations)
- Martijn N. Rooker and Andreas Birk - Communicative Exploration with Robot Packs, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 267-278, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (20 citations)
- Mohammad Nejad Sedaghat, Leila Pakravan Nejad, Sina Iravanian and Ehsan Rafiee - Task Allocation for the Police Force Agents in RoboCupRescue Simulation, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 656-664, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (9 citations)
- Cameron Skinner and Mike Barley - Robocup Rescue Simulation Competition: Status Report, in "RoboCup 2005: Robot Soccer World Cup IX", pp. 632-639, Lecture Notes in Computer Science 4020, Springer, Berlin-Heidelberg, 2006. (15 citations)
- RoboCup 2006 Symposium:
- Giuliano Polverari, Daniele Calisi, Alessando Farinelli and Daniele Nardi - Development of an Autonomous Rescue Robot Within the USARSim 3D Virtual Environment, in "RoboCup 2006: Robot Soccer World Cup X", pp. 491-498, Lecture Notes in Computer Science 4434, Springer, Berlin-Heidelberg, 2007. (5 citations)
- Marco Zaratti, Marco Fratarcangeli and Luca Iocchi - A 3D Simulator of Multiple Legged Robots Based on USARSim, in ""RoboCup 2006: Robot Soccer World Cup X", pp. 13-24, Lecture Notes in Computer Science 4434, Springer, Berlin-Heidelberg, 2007. (74 citations)
- RoboCup 2007 Symposium:
- Omid Aghazadeh, Maziar Ahmad Sharbafi and Abolfazl Toroghi Haghighat - Implementing Parametric Reinforcement Learning in Robocup Rescue Simulation, in "RoboCup 2007: Robot Soccer World Cup XI", pp. 409-416, Lecture Notes in Computer Science 5001, Springer, Berlin-Heidelberg, 2008. (9 citations)
- S. La Cesa, A. Farinelli, L. Iocchi, D. Nardi, M. Sbarigia and M. Zaratti - Semi-autonomous Coordinated Exploration in Rescue Scenarios, in "RoboCup 2007: Robot Soccer World Cup XI", pp. 286-293, Lecture Notes in Computer Science 5001, Springer, Berlin-Heidelberg, 2008. (4 citations)
- Winai Chonnaparamutt and Andreas Birk - A Fuzzy Controller for Autonomous Negotiation of Stairs by a Mobile Robot with Adjustable Tracks, in "RoboCup 2007: Robot Soccer World Cup XI", pp. 196-207, Lecture Notes in Computer Science 5001, Springer, Berlin-Heidelberg, 2008. (11 citations)
- Max Pfingsthorn, Bayu Slamet and Arnoud Visser - A Scalable Hybrid Multi-Robot SLAM Method for Highly Detailed Maps, in "RoboCup 2007: Robot Soccer World Cup XI", pp. 457-464, Lecture Notes in Computer Science 5001, 2008. (64 citations)
- RoboCup 2008 Symposium:
- Andreas Birk, Jann Poppinga, Todor Stoyanov and Yashodhan Nevatia - Planetary Exploration in USARsim: A Case Study Including Real World Data from Mars, in "RoboCup 2008: Robot Soccer World Cup XII", pp. 463-472, Lecture Notes in Computer Science 5399, Springer, Berlin-Heidelberg, 2009. (5 citations)
- Tijn Schmits and Arnoud Visser - An Omnidirectional Camera Simulation for the USARSim World, in "RoboCup 2008: Robot Soccer World Cup XII", pp. 296-307, Lecture Notes in Computer Science 5399, Springer, Berlin-Heidelberg, 2009. (20 citations)
- Dali Sun, Alexander Kleiner and Thomas M. Wendt - Multi-robot Range-Only SLAM by Active Sensor Nodes for Urban Search and Rescue, in "RoboCup 2008: Robot Soccer World Cup XII", pp. 318-330, Lecture Notes in Computer Science 5399, Springer, Berlin-Heidelberg, 2009. (13 citations)
- RoboCup 2009 Symposium:
- Ashkan Radmand, Eslam Nazemi and Mohammad Goodarzi - Integrated Genetic Algorithmic and Fuzzy Logic Approach for Decision Making of Police Force Agents in Rescue Simulation Environment, in "RoboCup 2009: Robot Soccer World Cup XIII", pp. 288-295, Lecture Notes on Artificial Intelligence 5949, Springer, Berlin-Heidelberg, 2010. (5 citations)
- Fares Alnajar, Hanne Nijhuis and Arnoud Visser - Coordinated action in a Heterogeneous Rescue Team, in "RoboCup 2009: Robot Soccer World Cup XIII", pp. 1-10, Lecture Notes on Artificial Intelligence 5949, Springer, Berlin-Heidelberg, 2010. (4 citations)
- Masaru Okaya, Shigeru Yotsukura, Tomoichi Takahashi - A Hybrid Agent Simulation System of Rescue Simulation and USARSim Simulations from Going to Fire-Escape Doors to Evacuation to Shelters, in "RoboCup 2009: Robot Soccer World Cup XIII", pp. 414-424, Lecture Notes on Artificial Intelligence 5949, Springer, Berlin-Heidelberg, 2010. (4 citations)
- RoboCup 2010 Symposium:
- Okke Formsma, Nick Dijkshoorn, Sander van Noort and Arnoud Visser, - Realistic Simulation of Laser Range Finder Behavior in a Smoky Environment, in "RoboCup 2010: Robot Soccer World Cup XIV", pp. 336-349, Lecture Notes in Artificial Intelligence 6556, Springer, Berlin-Heidelberg, 2011. (19 citations)
- RoboCup 2011 Symposium:
- Mohammad Norouzi, Freek Bruijn and Jaime Valls MiróPlanning Stable Paths for Urban Search and Rescue Robots, in "RoboCup 2011: Robot Soccer World Cup XV", pp. 90-101, Lecture Notes in Computer Science 7416, Springer, Berlin-Heidelberg, 2012. (3 citations)
- Masaru Okaya and Tomoichi Takahashi - Proposal for Everywhere Evacuation Simulation System, in "RoboCup 2011: Robot Soccer World Cup XV", pp. 246-257, Lecture Notes in Computer Science 7416, Springer, Berlin-Heidelberg, 2012. (1 citation)
- RoboCup 2012 Symposium:
- Francesco Amigoni, Nicola Basilico and Alberto Quattrini Li - How Much Worth Is Coordination of Mobile Robots for Exploration in Search and Rescue?, Proceedings of the 16th RoboCup Symposium, Mexico, June 2012. (12 citations)
- Masaru Okaya and Tomoichi Takahashi - Evacuation Simulation with Guidance for Anti-disaster Planning, Proceedings of the 16th RoboCup Symposium, Mexico, June 2012. (6 citations)
- Sander van Noort and Arnoud Visser - Virtual Robots towards RoboCup Soccer Simulation and @Home, Proceedings of the 16th RoboCup Symposium, Mexico, June 2012. (12 citations)
- RoboCup 2013 Symposium:
- Toshinori Niwa, Masaru Okaya and Tomoichi Takahashi - Parallel Computation using GPGPU to Simulate Crowd Evacuation Behaviors - planning effective evacuation guidance at emergencies, Proceedings of the 17th RoboCup Symposium, Eindhoven, July 2013. (1 citation)
- Khudaydad Mahmoodi, Muhammet Balcilar, Fatih Amasyali, Sirma Yavuz, Yüzun and Feruz Davletov - Routing with Dijkstra in Mobile Ad-Hoc Networks, Proceedings of the 17th RoboCup Symposium, Eindhoven, July 2013. (no citations)
- Zeid Kootbally, Stephen Balakirsky and Arnoud Visser - Enabling codesharing in Rescue Simulation with USARSim/ROS, Proceedings of the 17th RoboCup Symposium, Eindhoven, July 2013. (5 citations)
- Alain Caltieri and Francesco Amigoni - High-Level Commands in Human-Robot Interaction for Search and Rescue, Proceedings of the 17th RoboCup Symposium, Eindhoven, July 2013. (1 citation)
- Matteo Luperto, Alberto Quattrini Li and Francesco Amigoni - A System for Building Semantic Maps of Indoor Environments Exploiting the Concept of Building Typology, Proceedings of the 17th RoboCup Symposium, Eindhoven, July 2013. (9 citations)
- RoboCup 2014 Symposium:
- Victor Spirin, Julian de Hoog, Arnoud Visser and Stephen Cameron - MRESim, a multi-robot exploration simulator for Rescue Simulation League, in RoboCup 2014: Robot World Cup XVIII, Springer Lecture Notes on Artificial Intelligence series 2015, p. 106-117. (no citations)
- Arnoud Visser, Nobuhiro Ito and Alexander Kleiner - RoboCup Rescue Simulation Innovation Strategy, Proceedings of the 18th RoboCup Symposium, Special Track on the advancement of the RoboCup Leagues, JoãPessoa - Brazil, July, 2014. (3 citations)
- Tomoichi Takahashi and Masaru Shimizu - How can the RoboCup Rescue Simulation contribute to emergency preparedness in real-world disaster situations?, Proceedings of the 18th RoboCup Symposium, JoãPessoa, July 2014. (no citations)
- IváRiañnd Arnoud Visser - Mid-Term report 'Establishing bonds for the advancement of the Rescue League', Proceedings of the 18th RoboCup Symposium, Projects Promoting RoboCup, JoãPessoa, July 13, 20144. (1 citation)
- RoboCup 2015 Symposium:
- Masaru Shimizu, Nate Koenig, Arnoud Visser and Tomoichi Takahashi - A realistic RoboCup Rescue Simulation based on Gazebo, Proceedings of the 19th RoboCup Symposium, Development Track, Hefei, July 23, 2015 (no citations)
Labbook 2015
Labbook 2014
Labbook 2013
Labbook 2012
Labbook 2011
Labbook 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004