Wishlist
- 3D user-interface (open)
- 3D-Mapping (open
- Joint Rescue Forces list of tasks
- small tasks
- Reconnect when in range
- Use status message to select view.
Started
Labbook 2018.
November 16, 2017
- Following the instructions of CoSpace 2016 installation guide, I am installing Microsoft Robotics Studio 4 at my home computer (296 Mb).
- Could select the D-drive for the Studio (other dependencies such as Nvidea PhysiX are installed on the C-drive).
- The code sample gives "Mime type not found". Even wget couldn't it.
- Luckely there is a code sample in How to use CoSpace Rescue.
- Found the 2017 instructions on seperate page. Unfortunatelly, there you have to register.
- Followed the instructions of Singapore, and reserved the port 50000 for CoSpace with the command httpreserve /Force /x:127.0.0.1 /p:50000 /u:arnoud(user everyone was not known at my computer).
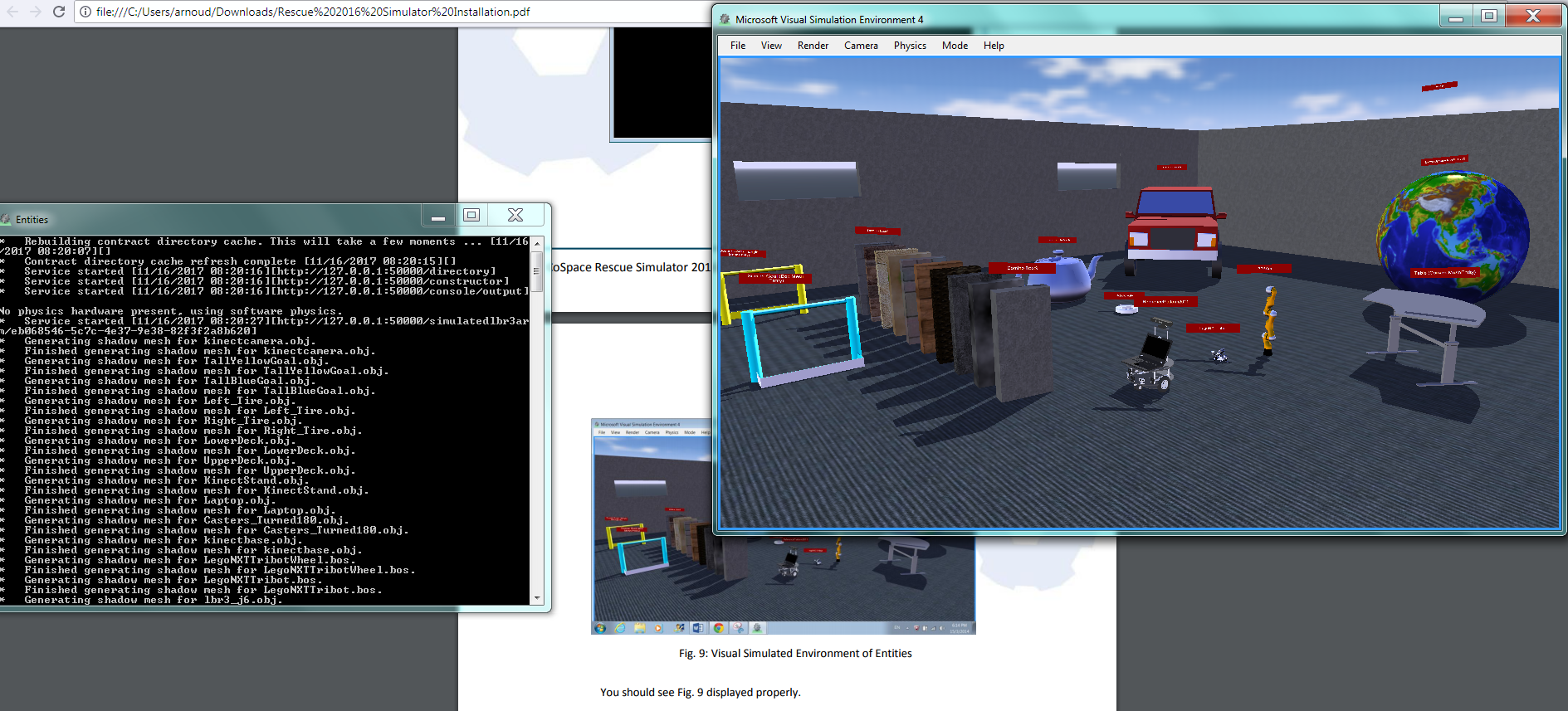
- Unzipped the 2017.zip, but this file doesn't have the CSR-Rescue.exe
- Trick is to run from the zip the Setup.exe, which allow you to select your Microsoft Robotics Studio directory and creates a startup icon on your desktop, which exectues the command D:\Programs\MicrosoftRoboticsDevStudio4\bin\DssHost32.exe /p:40011 /t:40013 /m:"CS\System\2017\CS_Rescue.manifest.xml".
- Tried the same command from the DSS Command line, but that doesn't seem to work for the 64bits version.
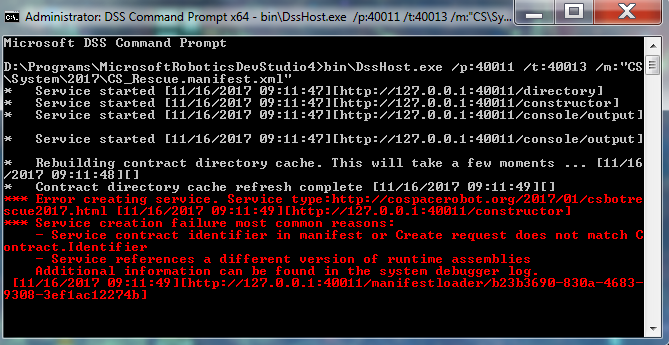
- With the same command from the 32bits DSS Command line (run as admin), there are no error messages, but not clear how to test the services.
November 1, 2017
October 29, 2017
- Read the an article in Field Robotics, about a robust humanoid called WALK-MAN.
- Central in their approach is a network-server, which understands if communication is direct or via a two-way bridge. The actuation control is via yarp-modules, the sensor contorol is via ros-modules (Figure 17).
- Inside Gazebo, a number of yarp device drivers are bundled into gazebo-lugins (section 3.3).
- At the Pilot Station a GUI is developed with a number of windows which are compination of Qt libraries and ROS LibRVIz libraries.
October 26, 2017
October 16, 2017
- Saw an article in Field Robotics, about a robust humanoid called WALK-MAN, including simulation in Gazebo (and an extensive sensor suite).
- Yet, the robotology repository contains a lot of iCub branches, for the Walk-Man they point to gazebo-yarp-plugins. There is documentation availiable, but this points for the robot models to tutorial models, which contains several sensor suites, but no walkman robot.
September 26, 2017
September 15, 2017
- Reevaluated part of my survey of January 2016.
- Found several high-impact articles outside the RoboCup Rescue community refering to the Agent competition.
- Babuska has a survey paper with an high impact, although from RoboCup only Soccer is mentioned.
- Reading A Comprehensive Survey of Multiagent
Reinforcement Learning. Good description of the challenge, although I suspect that Oliehoek's introduction was better.
However, several new
challenges arise for RL in multiagent systems. Foremost among
these is the difficulty of defining a good learning goal for the
multiple RL agents. Furthermore, most of the times each learn-
ing agent must keep track of the other learning (and therefore,
nonstationary) agents. Only then will it be able to coordinate its
behavior with theirs, such that a coherent joint behavior results.
The nonstationarity also invalidates the convergence properties
of most single-agent RL algorithms. In addition, the scalability
of algorithms to realistic problem sizes, already problematic in
single-agent RL, is an even greater cause for concern in multia-
gent reinforcement learning (MARL).
- Also:
A classification of the MARL algorithms along several taxon-
omy dimensions is also included. ... Besides single-agent RL, MARL has strong connections with
game theory, evolutionary computation, and optimization the-
ory, as will be outlined next.
- Finished the introduction. Section V contains the taxonomy. Section VIII contains the suggestions for future research.
- A lot of focus on stateless games and communication as something special. Good observation:
Coordination typically boils down to consis-
tently breaking ties between equally good actions or strategies.
- For exploration, Babuska points to Mataric: Reinforcement learning in the multi-robot domain. Cited 554x.
- Babuska overview paper is #4 pointing to Mataric. One and Two are Thrun, #3 is Cooperative multi-agent learning: The state of the art. Cited 932x.
- Looked for recent papers to the latter paper. Most I have encountered before, new was Cooperative control and potential games, cited 302x.
September 14, 2017
- Still one week to write an abstract for Delft Workshop on Robot Learning.
- Looked at a good approach for the article.
- It would be nice to highlight the work of some of my graduates, such as:
- The article 16 years can be found at overleaf.
- For style, I could use IJCAI format.
- Or the AAMAS, but that has no special format (or Springer LNAI)
Start working in ShareLaTeX.
April 11, 2017
March 9, 2017
- Uploaded the generated msg from nb-ros and made them available on the website.
- Still, catkin_make fails on the c++-version (because /home/student/RoboCupRescuePackage/robot_teleop.cc was compiled).
- The CMakelists.txt in catkin_usarsimros_ws is symbolic link to the /opt/ros/kinetic/share/catkin/cmake/toplevel.cmake. Added add_compile_options(-std=gnu++11) to the end of CMakelists.txt.
- Still, compilation fails on:
/home/student/catkin_usarsimros_ws/src/usarsimros-code/usarsim_inf/src/servoInf.cpp:1325:34: error: usarsim_inf::ToolchangerStatus {aka struct usarsim_inf::ToolchangerStatus_ >} has no member named tool_name
sw.name = effector->status.tool_name;
- Should try p3at_for_ros package.
- There is now also a kinetic package from Hector thermal camera.
- Actually, you could check the version of gazebo with gazebo --version. The current version is actually 7.5.0.
- Checked for worlds in the default ros installation, but only found:
/opt/ros/kinetic/share/gazebo_plugins/test/p3d_test/worlds
- After installing rosbash, rosrun gazebo_ros gazebo works (but need to start roscore first; rosversion: 1.12.6)
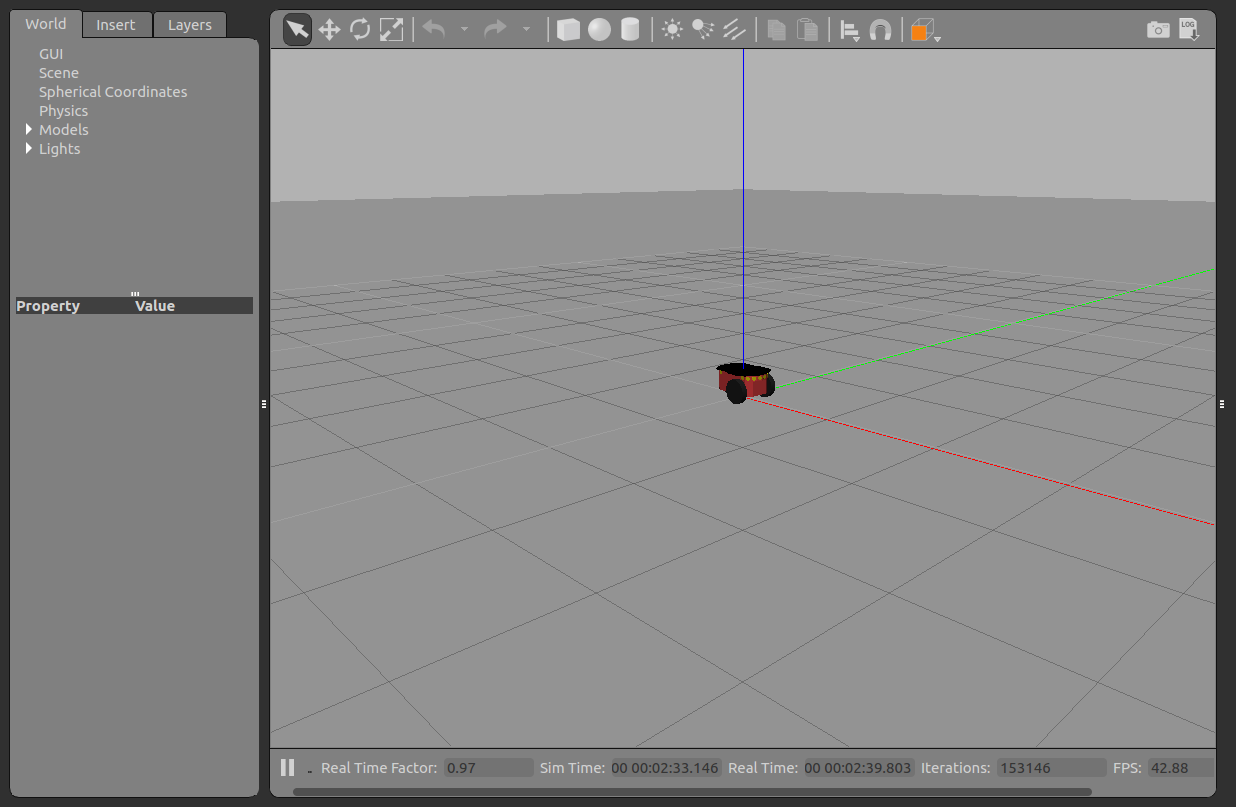
- Tested rosrun gazebo_ros gazebo worlds/pioneer2dx.world with success:
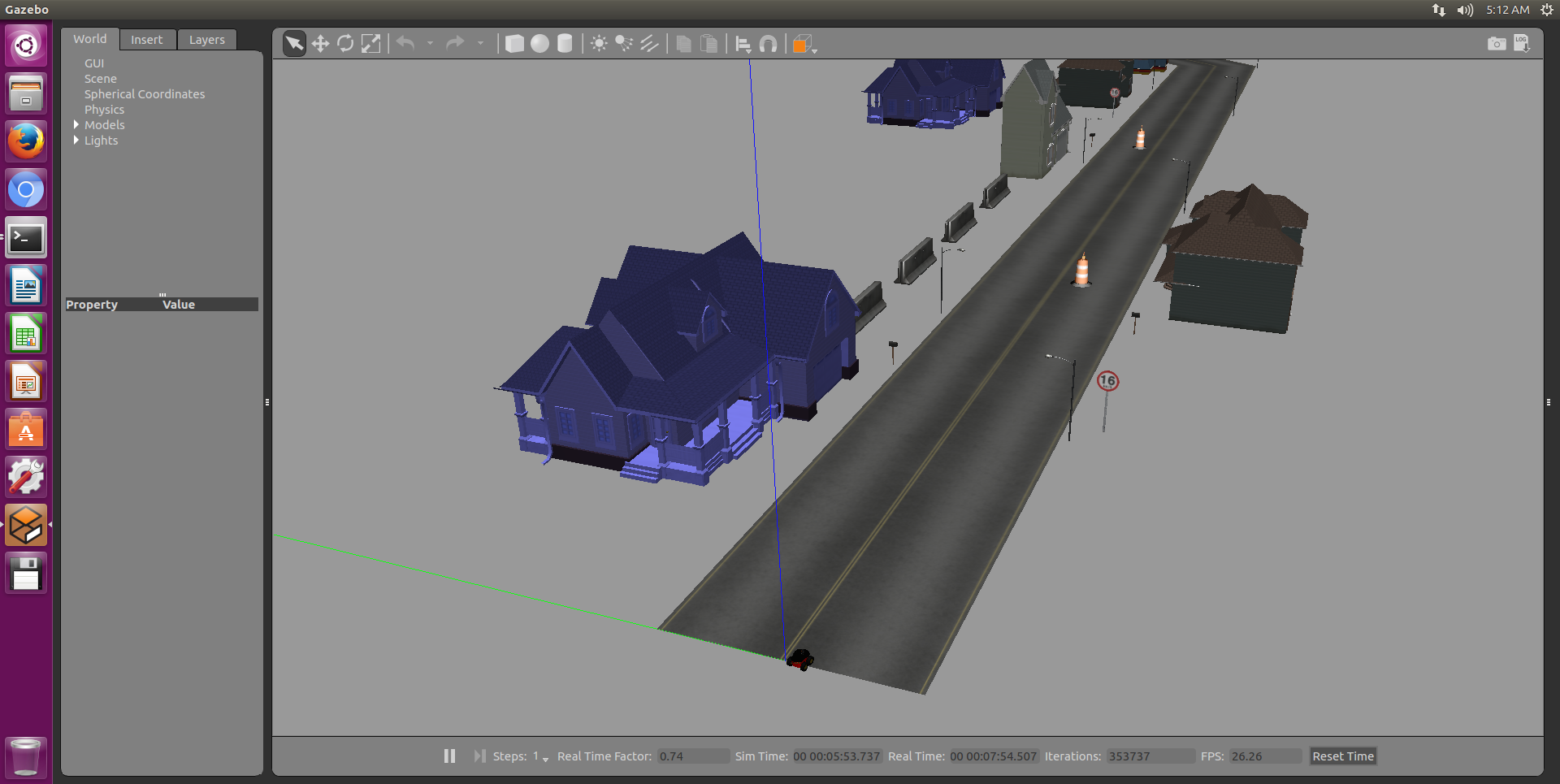
- Continue with day2. Was able to launch a P3AT in the Darpa Challenge environment:
March 8, 2017
- Continue with checking update 2017 day 1
- Same problem as February 28, 2016: SenseObject.h is missing.
- message_generation is already one of the specified PACKAGES. Added SenseObject.msg to add_message_files in CMakeLists.txt. Still same error.
- Checked the suggestions of 2016 and the documentation, but seems that both package.xml and CMakeLists.txt are updated with all steps in the tutorial, but still the SenseObject.h is not generated yet from the messages.
- Will try tomorrow with the msg_gen from nb-ros.
-
- Continue with the instructions from RoboCupRescuePackage.
- After uncommenting add_compile_options(-std=gnu++11) in ../CMakeLists.txt the compilation works fine.
March 4, 2017
- Testing the new installation instructions. Completed the instructions until sudo apt-get install ros-kinetic-gazebo-ros-pkgs. Didn't get a response for ros-kinetic-gazebo8-ros-pkgs or ros-kinetic-gazebo9-ros-pkgs
- Tried to run rosrun gazebo_ros gazebo, but rosrun first has to be installed with sudo apt install rosbash (and I lost my internet-connection of my virtual machine).
- The command gazebo worlds/pioneer2dx.world, although it is empty world due to the warning Unable to find uri[model://ground_plane].
February 19, 2017
- Had to update my bashrc at nb-ros because /usr/share/gazebo5.3/setup.sh was no longer available. Choose /usr/share/gazebo5.4/setup.sh instead (was already installed).
- nb-ros is crashing repeatingly. Seems to be due to init: at-spi2-registryd respawning too fast, stopped in .xsession.errors. Tried to solve it with a new ./conf/dconf, but to no avail. For a bugfix I seem to need to update to 16.04. Did first a normal Ubuntu base-update, hope that helps (is now stable for 15 minutes).
- The At-Spi2 Core package is a part of the GNOME Accessibility Project. It provides a Service Provider Interface for the Assistive Technologies available on the GNOME platform and a library against which applications can be linked.
January 21, 2017
- Was cited by a genomics paper, which used Nao robots as models of gene movement. The paper refered to other simulation environments to USARSim (our humanoid robot in USARSim paper and "J. Alemany, "Design of high quality, efficient simulation environments for USARSim", Technical Report ICC 2011-10-01, Universitat Jaume I,
Castello, Spain, October 2011". Should check if this Technical Report is in the RoboRescue publications list.
Labbook 2016
Labbook 2015
Labbook 2014
Labbook 2013
Labbook 2012
Labbook 2011
Labbook 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004