Started
Labbook 2025.
June 12, 2024
- Looked if pc-unreal is still functional. I last used it on February 28, 2016, when I used Ubuntu 14.04 from a ScanDisk.
- The computer needed a battery replacement to boot up. After that, the Windows and Suse Linux 10.1.
- I gave the permission to upgrade to Ubuntu 14.04.
June 4, 2024
- The Nanosaur doesn't startup, although I found the Jonkuu powerbank. Note that we never mounted the slide-switch at the expansion board.
- On March 21, 2022 I had an activated Nanoaur.
- On November 29, 2022 I used the stick of the NanoSaur to boot the spare Jetson Nano.
- Looked at the specs, the Jetson Nano can handle a power between 5W and 10W. Nota that a 12V or 19V powersupply will fry the board.
- Checked the Jetson Naon Troubleshooting. Only indicates: use a quality power supply.
- Used the TEA09E-09100 Switching Adapter (with crocodile DNT sticker), which was used for the Netgear router.
That power adapter provides 9V at 1.0A, nearly the 5V / 2.5 A of Adafruit adapter.
- Could look for the OAK-D power supply, but should first remove the flap and head.
May 27, 2024
May 24, 2024
- The 12V Powerbank arrived, but still the 5.5 mm connector didn't fit.
- The Technology center extended the Telescope cable with a connector that fits, so it works now both for the Velodyne and Hokuyo ULM30.
- The Powerbanks seem only to deliver 12V with the Telescope cable, not on the USB-B output (although it is specified on the bank that it can).
May 23, 2024
May 21, 2024
- On November 19, 2021 I still worked with the D435i. Where is that sensor now, I only see the RealSense D435.
May 16, 2024
- Measured the connector of the Velodyne. Outside is 5.5 mm, inside is 1.8 mm. Nearly the specs of 12V Powerbank.
May 14, 2024
- Looking into a battery for the Velodyne VPL-16. According to specifications, the power can be between 9 and 18V DC / 5W. That is less than 1 A. The connector seems to be DC3 or DC5.
- Found this 12V Powerbank, which has a (5,5x2,1 centrumpositief) connector. It can deliver 1.5A. It can be charged via the micro-USB or USB-C port. The USB-ports can also be used as output.
May 6, 2024
- At page 61, in note 26, in the Tutorial from Joan Solà, the following advice is given: "
We give the simplest form of the covariance update, P ← (I−KH)P. This form is known to have poor
numerical stability, as its outcome is not guaranteed to be symmetric nor positive definite. The reader
is free to use more stable forms such as 1) the symmetric form P ← P − K(HPH > + V)K > and 2) the
symmetric and positive Joseph form P ← (I − KH)P(I − KH) > + KVK
"
- There is no urdf in the unilidar_sdk github.
- The transform is specified in the point-lio unilidar github. Note that there is also a configuration for the velodyne 16.
-
- On June 19, 2023 I connected the Velodyne Puck to my Windows-partition of nb-dual. I also did it later with the Linux-partition, actually in the atwork labbook. Somewhere after April 22, 2024; when I received the instructions of Joey. The ~/catkin_ws/src/velodyne is from April 23 - which corresponds with the labbook entry.
- Found the GPS sensor in the AI Kit box.
- Found way to connect the Velodyne Puck VLP-16 back:
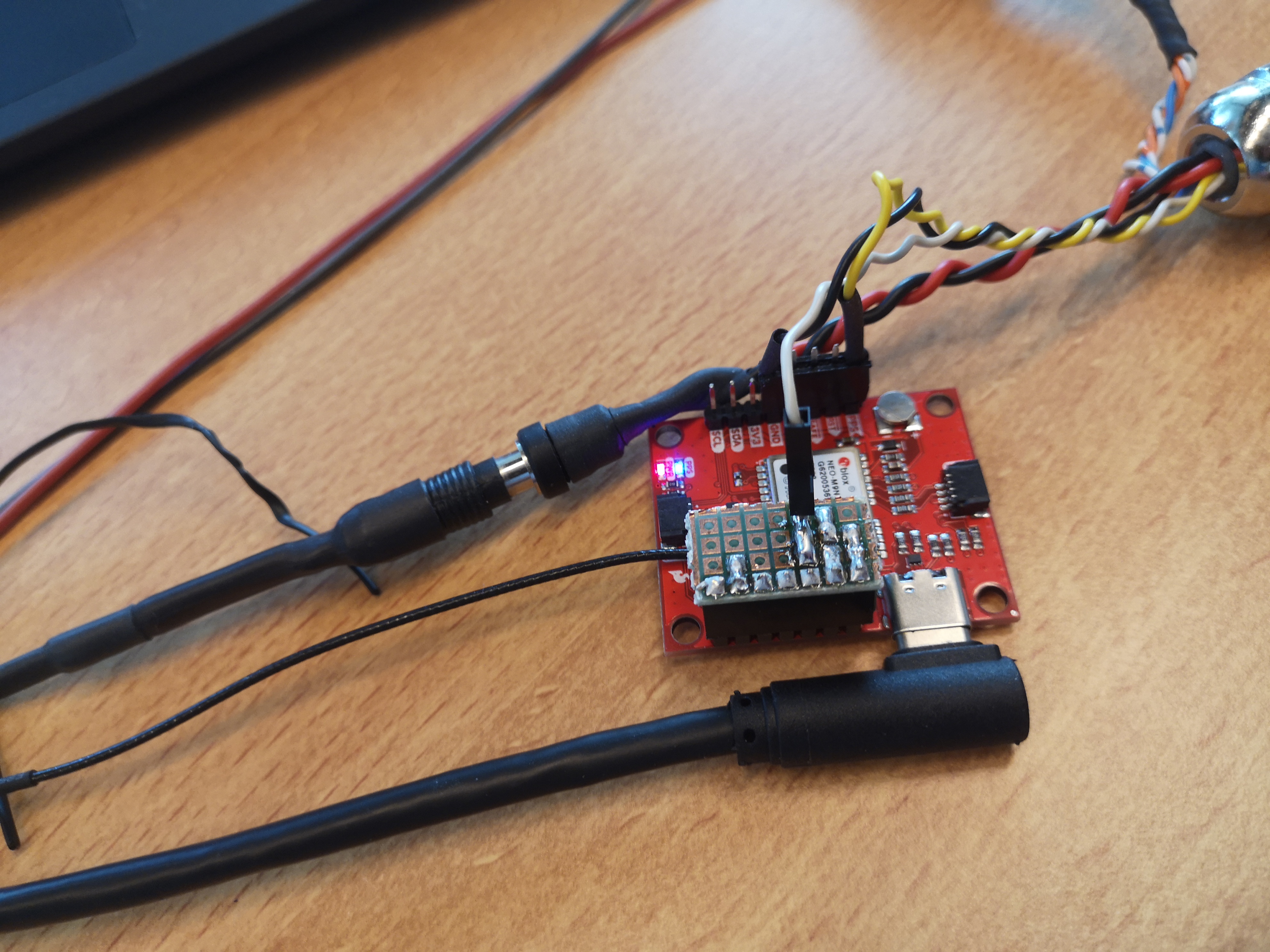
- With the cover on it, the connection should be as follows:

- For ROS noetic, I could follow Getting Started
- Tried roslaunch velodyne_pointcloud VLP16_points.launch. I see logmessage "Opening UDP socket: port 2368", have not checked the ip yet.
- Following the instruction and setting up a route to Velodyne ip worked. Did not get any view in RVIZ, because the velodyne frame was not known.
- Tried roslaunch velodyne_pointcloud transform_nodelet.launch, but that failed because it needed the service advertised by velodyne_nodelet_manager.
- Could have started velodyne_nodelet_manager velodyne_driver nodelet_manager.launch, but gave the Velodyne to Basille.
- Looked into the code of the transform, but it looks like applying the calibration data to compensate for the RPM. Also handy, but I could also have used rosrun tf static_transform_publisher 0 0 0 0 0 0 map velodyne 100
- Should look for a robot_description to get a better defined transform (xyz="0 0 0.0377").
May 5, 2024
- Continued with launch of the RVIZ viewer of the point-cloud of the Unitree L1 Lidar.
- The command roslaunch unitree_lidar_ros run.launch gives an error:
process[unitree_lidar_ros_node-3]: started with pid [30031]
terminate called after throwing an instance of 'serial::IOException'
what(): IO Exception (13): Permission denied, file /home/mlb/ut_workspace/202207_unitree_selfmade_lidar/unitree_lidar_sdk/unitree_lidar_sdk/src/serial/impl/unix.cc, line 151
- Strange, because the default /dev/ttyUSB0 is of group dailout (rw), so am I.
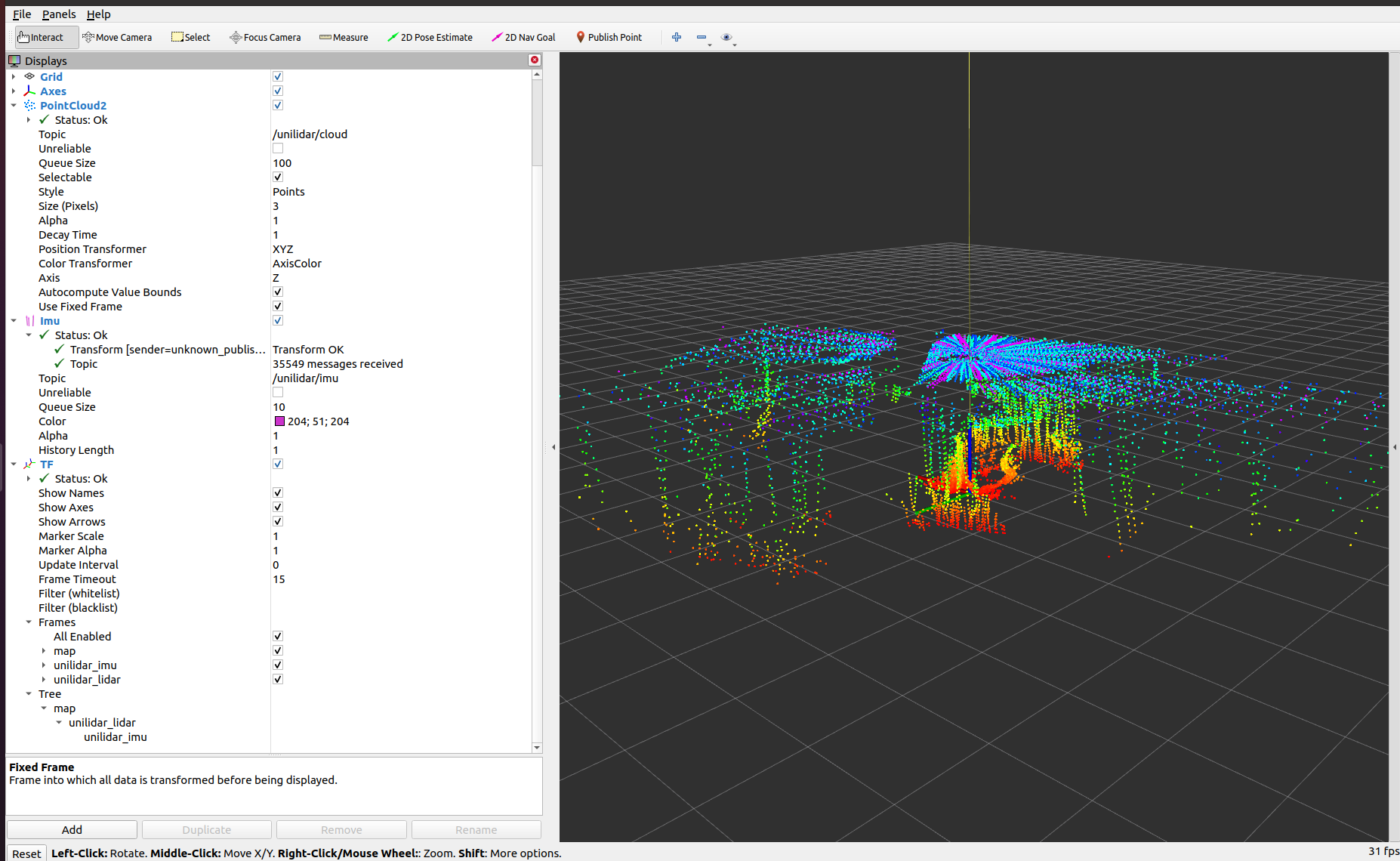
- After sudo chmod o+rw /dev/ttyUSB0 the sensor can be read out. Only missing is the transform to frame unilidar_lidar.
- Running rosrun tf static_transform_publisher 0 0 0 0 0 0 map unilidar_lidar 100 solves this partly. The lidar frame is now known, the unilidar_imu is still unknown.
- That could be solved with rosrun tf static_transform_publisher 0 0 10 0 0 0 unilidar_lidar unilidar_imu 100:
- Should look up the correct transforms in the documentation, or see if there is description. I have saw a 3D model in the downloads.
May 4, 2024
- Found the github for the Unitree L1 Lidar.
- The Start Guide and SDK can be found download page.
- As official software they indicate a Windows-based viewer.
- Yet, there are also instructions for ROS Noetic.
- Started with the dependencies mention in Point LIO SLAM github. Both pcl-conversions and libeigen3-dev were already installed.
May 3, 2024
- This Tutorial from IRI, Barcelona explains the use of EKF with quaternions.
- According to this blog, the Orbbec Gemini 2L is more stable than the RealSense D455.
March 11, 2024
- A list of Robotics and Automation IEEE Keywords can be found here
February 16, 2024
January 16, 2024
- ROS2 Navigation has now tagged 'good first issues' at their github page.
Labbook 2023
Labbook 2022
Labbook 2021
Labbook 2020
Labbook 2019
Labbook 2018
Labbook 2017
Labbook 2016
Labbook 2015
Labbook 2014
Labbook 2013
Labbook 2012
Labbook 2011
Labbook 2010
Labbook 2009
Labbook 2008
Labbook 2007
Labbook 2006
Labbook 2005
Labbook 2004