
RoboCup Rescue
Description
The assignment for the RoboCup Rescue Simulation League is to build an Multi-Agent Community for Rescue Operations in Simulated Systems. The Universiteit van Amsterdam has participated in the 2003 competition, both in Germany and Italy, and participate remotely in the Rescue Middle Earth competition 2004. In 2006, the UvA participates in the new Virtual League in Bremen. Publications related to the Virtual League can be found at the wiki-site.Our approach, as prelimenary outlined in our Team Description Paper can be summerized as follows:
- Scan Matching
- Iterative Closest Point algorithm with a probabilistic approximation of the correspondence error.
- Localization and Mapping
- Create a topological map with distinctive laser scans and estimated displacements
- Ground them to global map based on RFID detections
- Loop closure based on inverse of the correspondence error matrix.
Day1
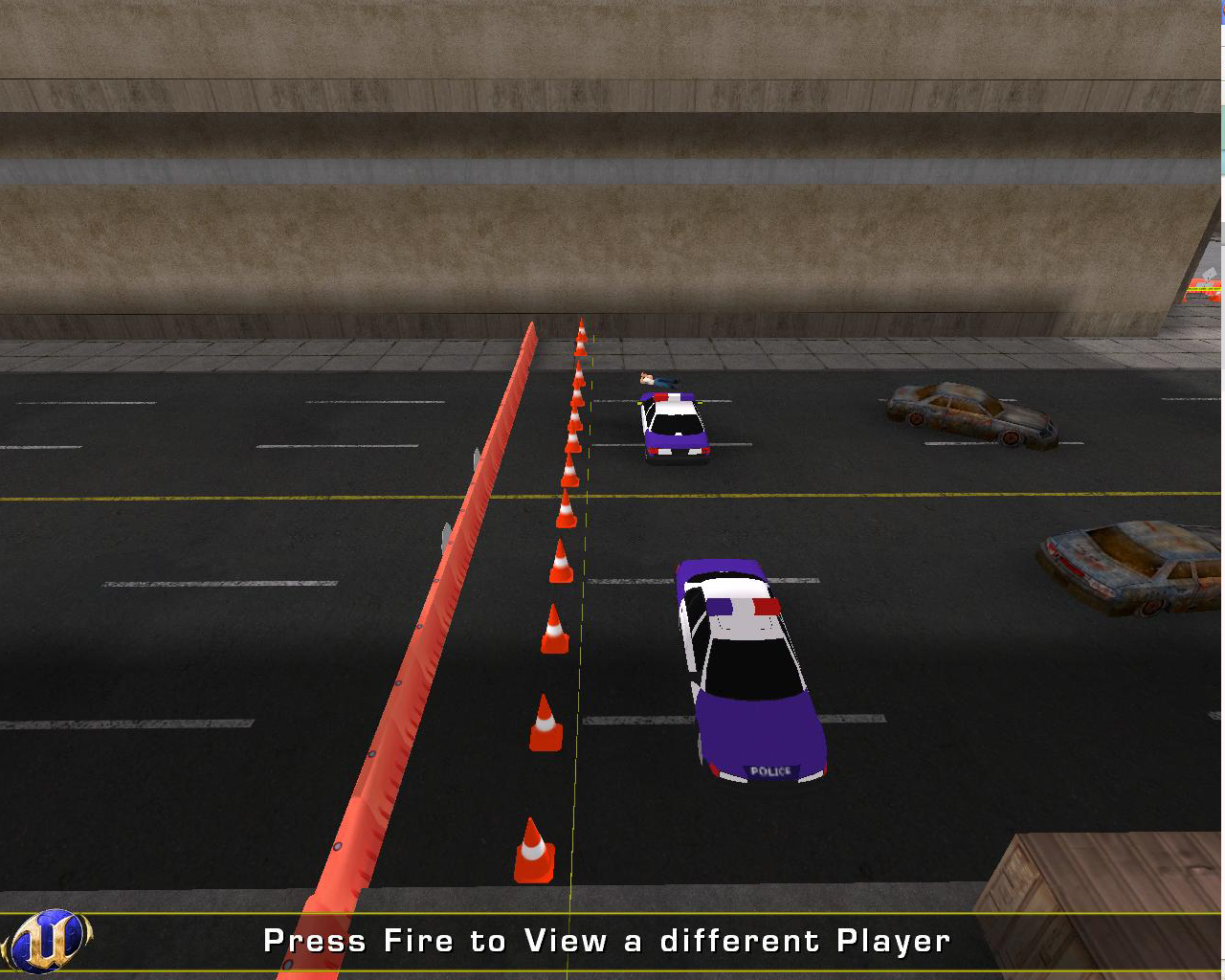
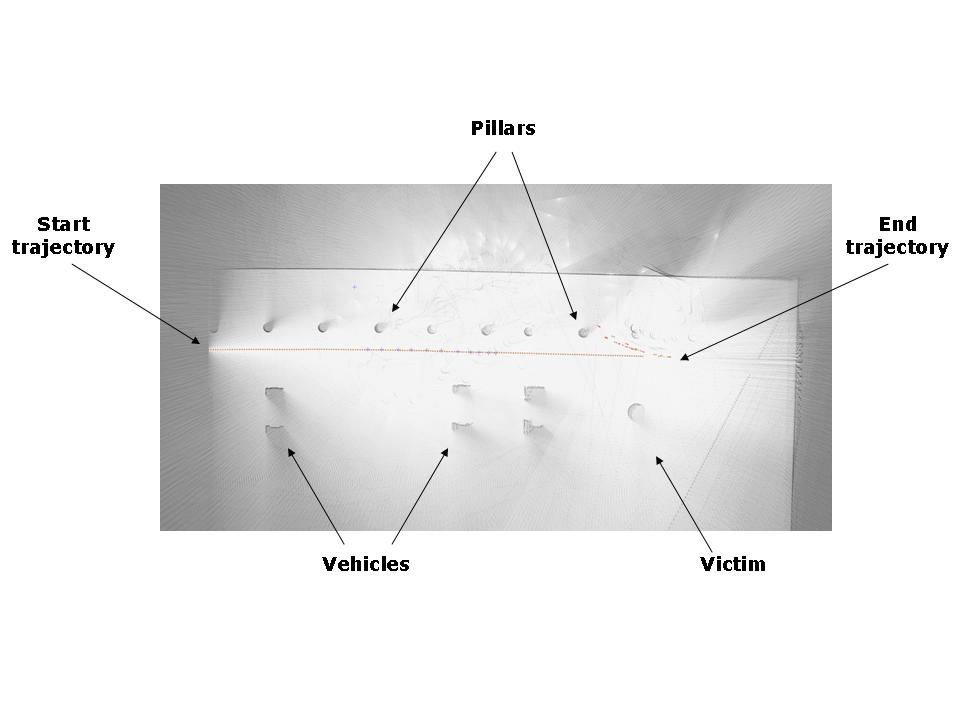
Max and Bay made the best map of the scene outside. The scene was a piece of road between four buildings, with broken cars and victims spread allover. They spanned in the allowed 20 minutes 2 robots, one after each other. They selected the map from the second robot, crossing the street between a lines of pilars and a few vehicles. With their robots they explored 25% of the area.
The result of the 1th day was a 4th place with 35.5 points, 7.38 points behind teleoperated Steel, but with 20.69 points more than SPQR.
Day2
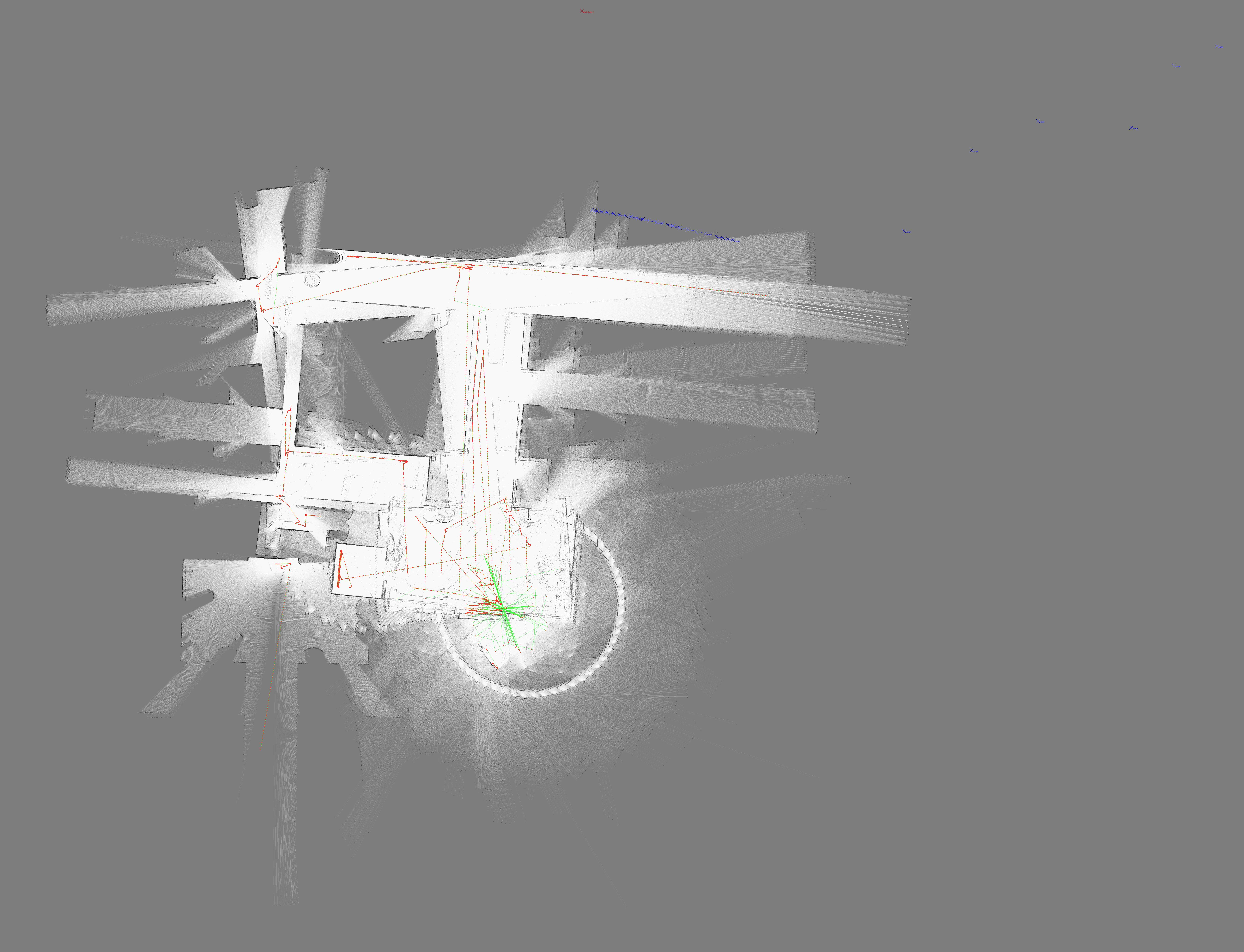
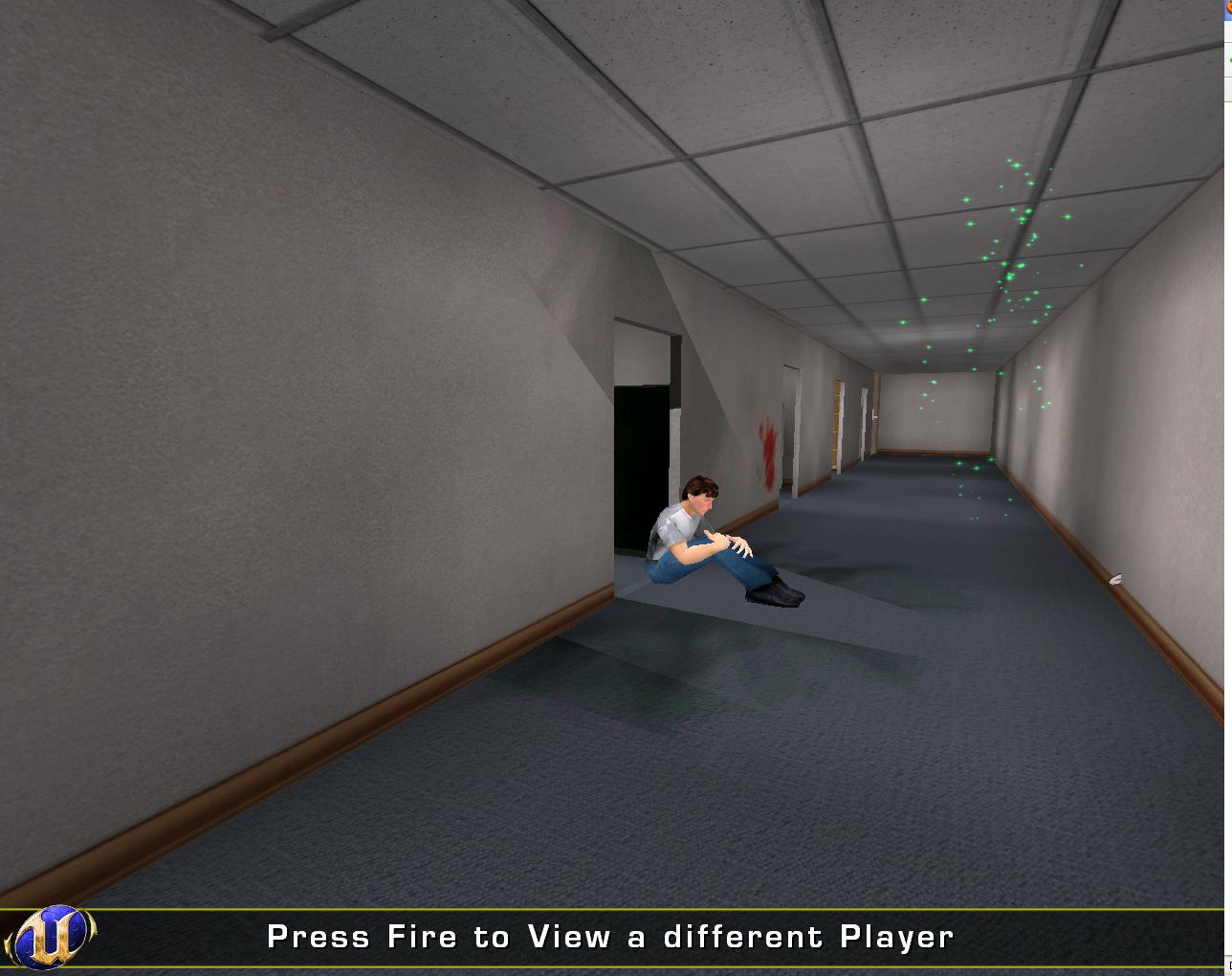
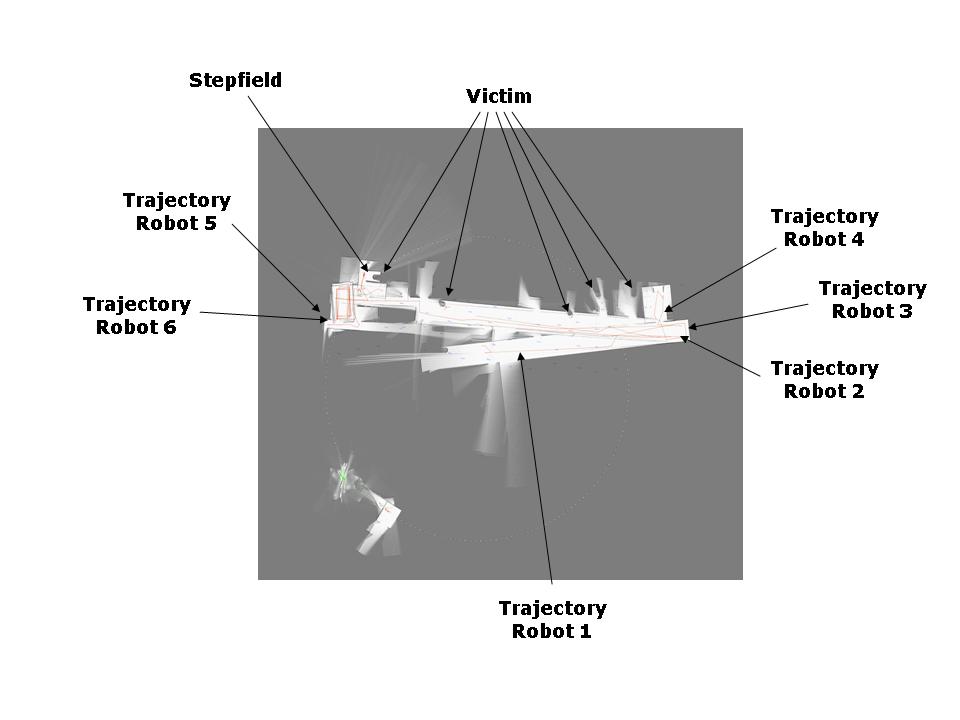
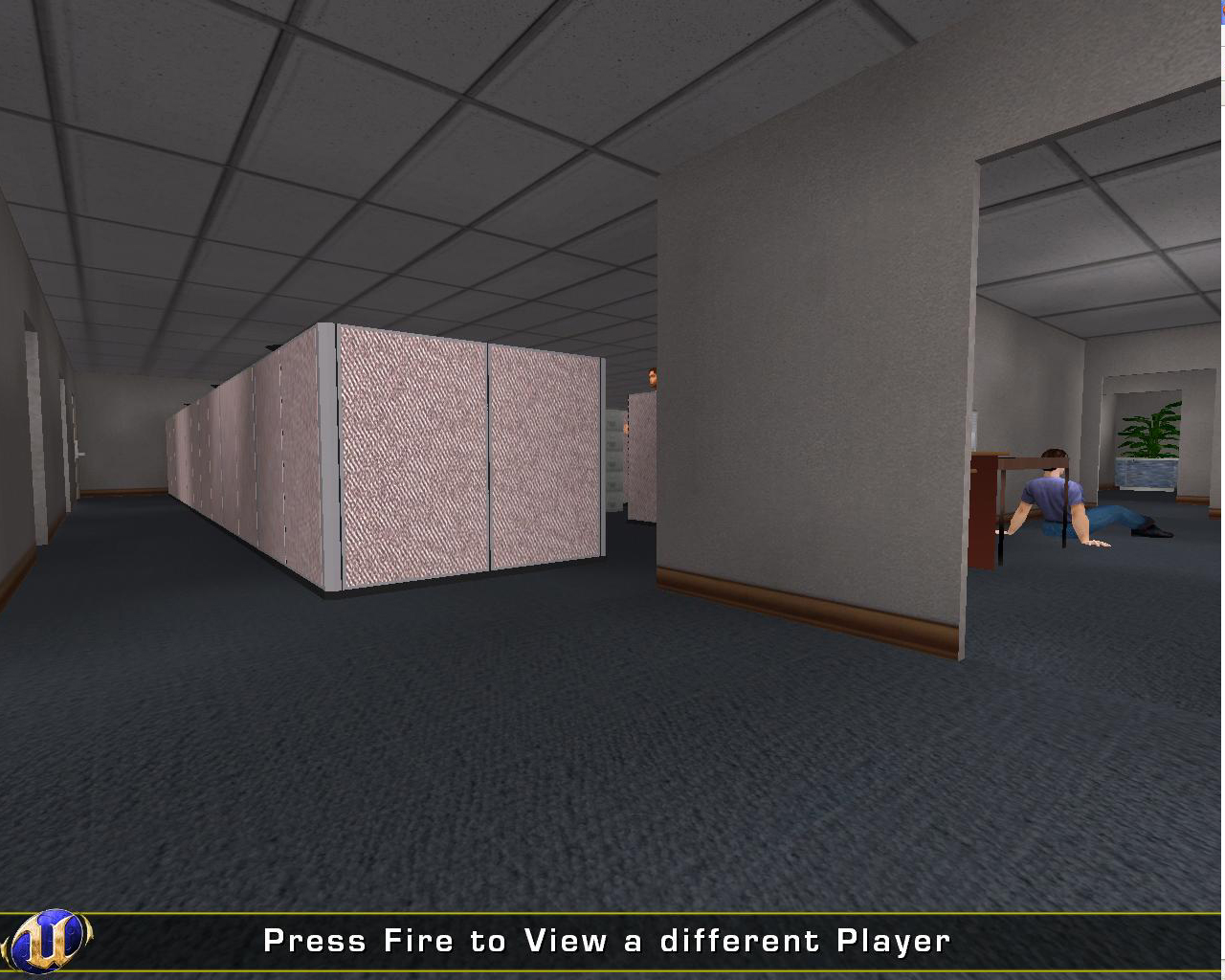
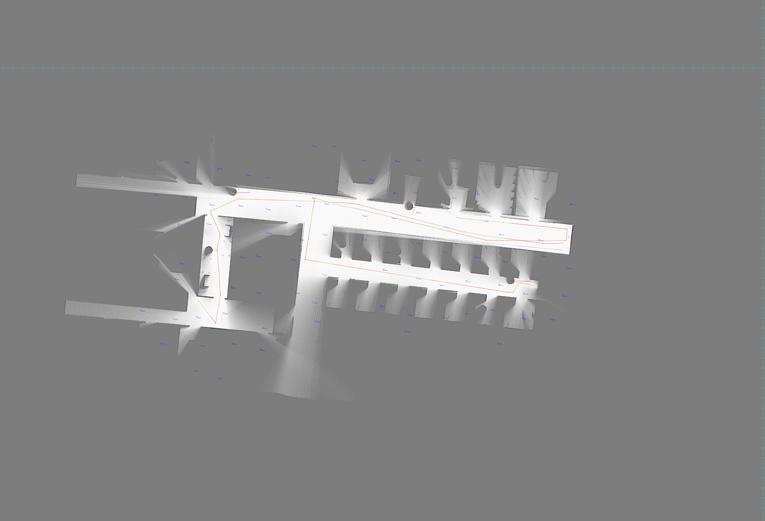
On the second day the tournament went inside. The scene was an office environment, with victims in the corridors and rooms. Max and Bayu used today 6 robots, and merged the map together. The individual maps were very good, except for the one in the lower right corner. This robot fell upside down and continued mapping with its wheels in the air. The result is the circle. Also the merging of the individual maps can still be improved. The robots explored half of the area, and found one of the victims.

The result of the 2nd day was a 3th place with 43.4 points, 24.85 points less then Virtual IUB, but 9.77 points more than STEEL.
Day3
On the third day the tournament difficulties like stepfields were introduced. Max and Bayu progress continued. They found three of the victims, and explored 60% of the map. This could have been more, because the collision avoidance was set too sensitive; three robots failed to pass a victim in one of the corridors.
With this result they reached the semi-finals of the competition. The cumulative score of the prelimanary rounds was:
| Team | Day1 | Day2 | Day3 | Total |
|---|---|---|---|---|
| Freiburg | 120.00 | 86.00 | 125.00 | 331.00 |
| Virtual IUB | 56.50 | 68.25 | 115.36 | 240.11 |
| UvA | 35.50 | 43.40 | 60.00 | 138.90 |
| STEEL | 42.88 | 33.63 | 54.43 | 130.94 |
| SPQR | 14.81 | 31.49 | 7.05 | 53.35 |
| GROK | 10.94 | 10.06 | 30.12 | 51.12 |
| ITANDROIDS | - | - | - | 0.00 |
| SBCE Saviour | - | - | - | 0.00 |
Semi-Finals
During the semi-finals two maps were explored. Max and Bayu improved their collision avoidance and were able to explore 87% and 100% of the map.
In the second run we failed to merge the results of the different robots, which explains the relative low score. In contrast, Freiburg was able to create their first map of the competition.
| Team | Run1 | Run2 | Total |
|---|---|---|---|
| Freiburg | 220.00 | 442.09 | 662.09 |
| Virtual IUB | 326.83 | 266.07 | 592.90 |
| UvA | 235.23 | 99.00 | 334.23 |
| STEEL | 88.58 | 122.34 | 210.93 |
| SPQR | 58.66 | 95.49 | 154.14 |
| GROK | 41.98 | 46.13 | 88.10 |
With this result the UvA Rescue team became 3rd, and received a prize for their mapping software. The Steel Team received a prize for their inspiring user interface.
Thesis
- Bayu Slamet and Max Pfingsthorn: ManifoldSLAM: a Multi-Agent Simultaneous Localization and Mapping System for the RoboCup Rescue Virtual Robots Competition. Master's thesis, Universiteit van Amsterdam (December 2006) (PDF)
See the list of this year publications at Amsterdam Oxford Joint Rescue Forces website.