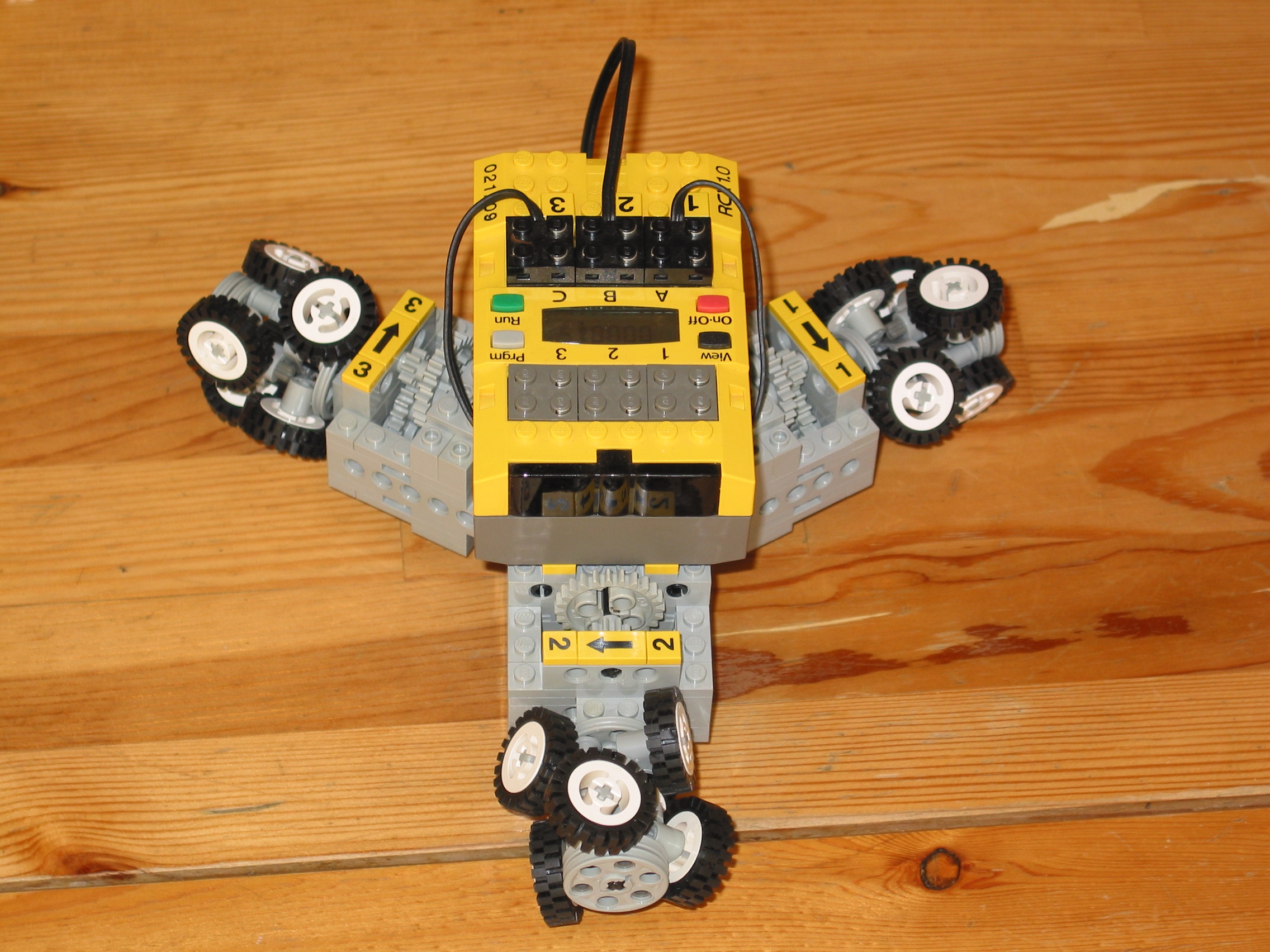
This has only three motors, symmetrically placed, to govern the three degrees of freedom for a planar motion: two translation parameters, and a rotation.
It does this by making `linear wheels', which are powered in one direction and free to move in the perpendicular direction. (Normal wheels can be powered in one, and block sideways motion.) The inventor, Killough, achieves this by powering wheels 'sideways'. This demands a special construction: one 'linear wheel' is made with two real wheels, with ideally a circular cross-section, turned 90 degrees relative to each other, so that when one leaves contact with the floor, the other takes over. (If you find this hard to follow, try the movie at Markus Matern's site listed below.)
Aren't we lucky: Lego has such spherical wheels as well, and they are just big enough so that we can suspend them and rotate them. Here is the design:
The powering can be done in many ways; here I have used the old motor. As long as you make sure that it turns the wheels in each wheel assembly simultaneously, and with a 90 degree phase difference.
When you are done you can power any combination of the motors; they generate motions in each of the wheels assemblies, and the linearity of the wheels means that these add as vectors, producing the total motion. Ideally, no component of motion gets lost (in ideal normal wheels, the motion component in the direction of the axle gets absorbed completely), though it may get canceled by a similar component of opposite sign. For instance, all motors turning in the same direction gives a rotation of the platforms; two turning in opposite directions and the third motor static gives a translation in the direction of the third.
To be a little more precise: the wheels are not rotated by the motors around their axles, but the axles are rotated in a plane. If the axle of the wheel is originally in the z direction, it rotates in the y-z plane. This will create motion in the y-direction, due to the fact that the wheels touches the ground 'sideways'. Also the wheel will be totally free to move in the x-direction, since that is how it spins on the (now rotated) axle. The second wheel in each assembly is just to make this always true: when the first leaves the ground due to its rotation, the second takes over. (Hope this helps, this is hard to explain, and even hard to believe when you see it move around: build it!)
Inspired by the above, Markus Matern built a much smaller and more manageable version, permitting even remote control using the IRS. Since the wheels I used are somewhat hard to get, check this out! He also includes some video of the operation of the platform.
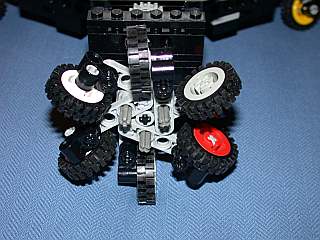
So I had to make it smaller too. I did this by reducing the wheels to a single axis, rather than two. The ride is even a bit less bumpy than with Markus' design.
 (Picture thanks to Jennifer Clark 2004)
(Picture thanks to Jennifer Clark 2004)
But of course, Markus was not beaten. He redesigned the wheel for an even smoother ride within the week, and sent me the result:

He did not have enough wheels to make the supersmooth wheels all around, but you get the idea.

031022
And in May 2005, Philo improved it once more, making it even smaller using non-technic wheels.
Check it out!