The Future of Robot Rescue Simulation - Software day 5
Installation requirements
The workshop has several tutorials and hands-on assignments, which require simulation and programming environments. This page describes the software-packages which should be installed on your computer for the fourth day of the workshop.
What is needed to be prepared for the workshop, is Linux laptop with Ubuntu 14.04.4 LTS (Trusty 64bits), with ROS Indigo and Gazebo5. On top of that you have installed the GazeboUSARSim plugin and the Matlab Robotics System Toolbox. On this page we assume that you installed those packages following the previous instructions.
Software for day 5
To have multiple robots in their own namespace, you could follow the instructionof the pioneer3at_demo provided by Stefan Kohlbrecher and Nate Koenig. Yildiz demonstrated that this worked with their example code.
What is needed for to control a real robot is a working version of the simulation of a Nao robot.
- Follow the steps of the ros Nao installation
- mkdir ~/naoqi
- Download pynaoqi-python2.7-2.1.4.13-linux64.tar.gz
- cp ~/Downloads/pynaoqi-python2.7-2.1.4.13-linux64.tar.gz ~/naoqi
- cd ~/naoqi
- tar xzf pynaoqi-python2.7-2.1.4.13-linux64.tar.gz
- echo 'export PYTHONPATH=~/naoqi/pynaoqi-python2.7-2.1.4.13-linux64:$PYTHONPATH' >> ~/.bashrc
- python
inside python shell
>>> from naoqi import ALProxy
>>> quit()
- sudo apt-get install ros-indigo-nao-robot
- sudo apt-get install ros-indigo-nao-bringup
- sudo apt-get install ros-indigo-naoqi-bridge
- sudo apt-get install ros-indigo-nao-extras
- ROS_IP=
roscore - rosrun naoqi_driver naoqi_driver_node --qi-url=tcp://
:9559 --roscore_ip --network_interface - rosnode info /nao_robot
- kill driver
- rosrun naoqi_driver naoqi_driver_node --qi-url=tcp://
- Download world.stl
- roslaunch nao_bringup nao_full_py.launch nao_ip:=
roscore_ip:= - rosrun rviz rviz
- add the MoveIt as MotionPlanner. add world.stl as Scene Object:
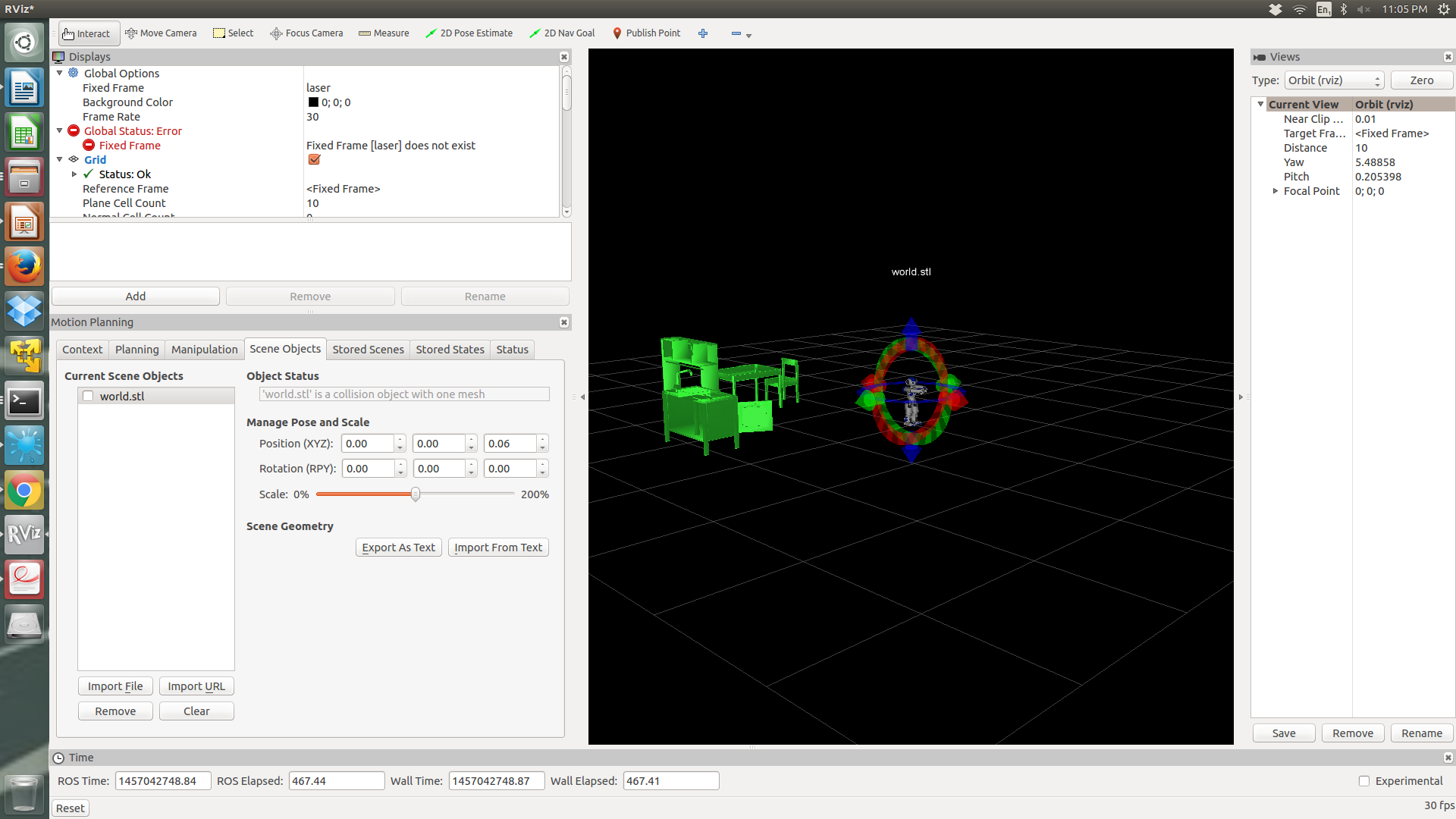
- You should be able to see the camera image inside rviz.
Hands-on
If you like to have fun, try to plan to grab the door with the Nao robot or to recognize a tomato.
Alternatively, try rocon gateway, multimaster fkie or topic proxy.
If this communication works, it could be included into a new version of the Rules.
Alternative versions
The packages used during this workshop have complex dependencies. It is well possible that you don't have to downgrade from ROS Gravy or upgrade from Gazebo5 and still be succesfull in the workshop. Actually, such alternative installation could give usefull information on the sensitivities and dependencies of the packages, so please record your experience. Yet, our experience is that the least time is wasted when you upgrade/downgrade to the versions which are recommended here.
Workshop Program
Day 1 - Monday Feb 29
Day 2 - Tuesday March 1
Day 3 - Wednesday March 2
Day 4 - Thursday March 3
Day 5 - Friday March 4
Tutorial Preparation
- Masaru Shimizu, Chukyo University, Aichi, Japan
- Lauren Tabolinsky & Arie Weeren - MathWorks
- Nate Koenig - Open Source Robotics Foundation
- Satoshi Kochiyama - New Energy and Industrial Technology Development Organization, Japan
- Stefan Kohlbrecher - TU Darmstad, Germany
- Ricardo Tellez - The Construct Sim
- Arnoud Visser, Universiteit van Amsterdam, The Netherlands
The organizing committee
- Arnoud Visser, Universiteit van Amsterdam, The Netherlands
- Francesco Amigoni, Politecnico di Milano, Italy
- Masaru Shimizu, Chukyo University, Aichi, Japan
This workshop is made possible by contributions of a number of companies and organizations: the Lorentz Center, the Intelligent Robotics Lab, the Intelligent Autonomous Systems fund, the Autonomous Intelligent Robots foundation, the Benelux Association for Artificial Intelligence, the RoboCup Federation, The Construct Sim and MathWorks.
.
![]()

![]()
![]()
The background image is an artist impresion of NASA's Valkyrie Robot (courtesy NASA's Johnson Space Center).