
|
|||||

|

|
||||
| Research | Vision | Intelligent Robotics Lab | Artificial Intelligence | Education | ||||
| Arnoud's | Research |
| Education |
| Activities |
| Publications |
| Projects |
Educational work
See also the courses of the Intelligent Robotics Lab and my Educational C.V.. When needed, a free educational room can be booked at Science Park.
Teaching
Future
 Robots that Learn (2027) - 3rd year Bachelor AI
Robots that Learn (2027) - 3rd year Bachelor AI
Currently
 Autonomous Mobile Robots (2012-2016, 2025 - now) ) - 3th year Bachelor AI
Autonomous Mobile Robots (2012-2016, 2025 - now) ) - 3th year Bachelor AI
Finished
 Behavior-Based Robotics (2015 - 2025) - 3th year Bachelor PsychoBiology
Behavior-Based Robotics (2015 - 2025) - 3th year Bachelor PsychoBiology

 Inleiding Kunstmatige Intelligentie (2019 - 2023) - 1st year Bachelor AI
Inleiding Kunstmatige Intelligentie (2019 - 2023) - 1st year Bachelor AI

Information Revolutions (2020) - honours Interdisplinair Bachelor
 Probabilistic Robotics (2008-2011, 2017-2018) - Master AI
Probabilistic Robotics (2008-2011, 2017-2018) - Master AI Media Understanding (2017) - 3th year Bachelor AI
Media Understanding (2017) - 3th year Bachelor AI Computer Systems
(2003 -
2004,
2009 -
2016) - 2nd year Bachelor AI
Computer Systems
(2003 -
2004,
2009 -
2016) - 2nd year Bachelor AI
 Search, Navigate, and Actuate (Zoeken, Sturen, Bewegen) (2004 - 2012),2015-2017
Search, Navigate, and Actuate (Zoeken, Sturen, Bewegen) (2004 - 2012),2015-2017
- 1th year Bachelor AI  Honours project - 2nd & 3th year Bachelor AI (-2015-2016)
Honours project - 2nd & 3th year Bachelor AI (-2015-2016) Introduction to AI Robotics (2008-2009)- 1th year Bachelor AI.
Introduction to AI Robotics (2008-2009)- 1th year Bachelor AI. Design and Organisation of Autonomous Systems (1995-2009) - 4th year
Design and Organisation of Autonomous Systems (1995-2009) - 4th year  Bachelor graduation project
(2002,
-
2004,
2007 -
,
2010)
Bachelor graduation project
(2002,
-
2004,
2007 -
,
2010)
- 3rd year Bachelor AI
 Introduction to the workstations at the UvA (2003-2013)- 1th year Informatics Institute.
Introduction to the workstations at the UvA (2003-2013)- 1th year Informatics Institute. C++ programmeermethoden
(
2012-2015) - College of Science (1th years and above)
C++ programmeermethoden
(
2012-2015) - College of Science (1th years and above)
Graduation projects
Running Master projects
| Student |
Subject |
Started |
|
|
Julio Smidi
|
Tree classification through sensor-fusion. | (Januari 2026) |
|
|
Emo Maat
|
Assessing robustness of RGB to IR diffusion models | (December 2025) |
Finished Msc-theses
Research project Master
- Alejandro Guereña Gonzalez, development an autonomous cleaning robot based on a quadruped platform, Sherpa Digital, Nov 2025 - May 2026.
- Eva Gmelich Meijling, AI4EO: Task-Specific and Foundation Models, project report, visit ESA φ-lab, May 1, 2025.
- Marina Orozco Gonzalez, Ricardo Chavez Torres, Danilo Toapanta Barahona, Robin Reitsma, Gijs de Jong, Harold Ruiter, Occupancy and Flow challenge CV2 project, Universiteit van Amsterdam, June 13, 2024.
- Lucas Ponticelli, Taiki Papandreou-Lazos, Erik Meijer, Bart de Zwart, Luuk Versteeg, Tobie Werner, Mapless Driving challenge, CV2 project, Universiteit van Amsterdam, June 12, 2024.
- Milan La Riviere, Mark Honkoop, Gideon Pol, ROS2 Rerun, Research Project MscCS, Universiteit van Amsterdam, June 2024.
- Leon Eshuijs, SpotMicroAI: a micro step towards intelligent locomotion, project report, Universiteit van Amsterdam, February 10, 2023.
- Ryan Amaudruz, Dorian Bekaert, Milena Kapralova, Darie Palfi, Bogdan Petcu, Alexandru Turcu, Robotic Vision Scene Understanding Challenge , CV2 project, Universiteit van Amsterdam, June 2, 2023.
Running Bachelor projects
| Student |
Subject |
Started |
|
| Irem Afacan | RGB-D Salient Object Detection | March 2026 | |
| Finn van Bakel | RGB-D Navigation with the Avular Origin | March 2026 | |
| Fleur van Teijlingen | Localization of the Flapper Nimble+ | March 2026 |
Finished Bsc-theses
Julia A. de Vries, Symmetry-Aware RL Kick - Incorporating Symmetry into Reinforcement Learning to Train a Kicking Policy for the Booster K1, Bachelor thesis, Universiteit van Amsterdam, February 7, 2026.Dário Xavier Catarrinho, Boosting Perception - Comparative Analysis of Transformer, One-Stage and Two-Stage Based Object Detection Architectures for Real-Time Object Detection on the Booster K1 Platform, Bachelor thesis, Universiteit van Amsterdam, February 1, 2026.
Harmen Siezen, MLP-Based Torque Estimation from Decomposed HD-sEMG Signals, Bachelor thesis, Universiteit van Amsterdam, July 4, 2025.
Felix Hoekstra, Unsupervised Semantic Segmentation for Autonomous Driving Cars, Bachelor thesis, Universiteit van Amsterdam, July 26, 2024.
Junis Nagel, Teaching a Nao robot to balance on one leg using reinforcement learning, Bachelor thesis, Universiteit van Amsterdam, July 5, 2024.
Thomas Brouwer, Human Imitation by a Nao Robot using Optical Motion Capture and Unity, Bachelor thesis, Universiteit van Amsterdam, July 5, 2024.
Peter Soulard, Stochastic Test for Accelerated Robot Motion Planner Completeness, Bachelor thesis, Universiteit van Amsterdam, July 1, 2024.
Chris de Hart, Comparing the newest version of YOLO with YOLOv5 in landmark based visual SLAM, Bachelor thesis, Universiteit van Amsterdam, June 28, 2024.
Fabian Ivulić, LiDAR Inertial Odometry with the Unitree 4D LiDAR L1 sensor, Bachelor thesis, Universiteit van Amsterdam,June 24, 2024.
Madelon Bernandy, Introducing object detection to EKF SLAM on a Nao-robot football field, Bachelor thesis, Universiteit van Amsterdam,June 24, 2024.
Julian Blaauboer, Performance of LTCs in Adapting to Joint Wear , Bachelor thesis, Universiteit van Amsterdam, February 16, 2024.
Pearl Owusu, Recognizing All Opponents: A Real-Time Object Detection Approach for Robotic Soccer Jerseys, Bachelor thesis, Universiteit van Amsterdam, February 2, 2024.
Gijs de Jong, A Soft-Actor-Critic approach to quadruped locomotion, Bachelor thesis, Universiteit van Amsterdam, June 30, 2023.
Angelo Broere, Monocular Navigation for a Duckiebot Using a High-Resolution Encoder-Decoder Architecture, Bachelor thesis, Universiteit van Amsterdam, June 30, 2023.
Erik Meijer, Autonomous Navigation Training with Dynamic Obstacles for Deployment in Highly Constrained Environments, Bachelor thesis, Universiteit van Amsterdam, June 30, 2023.
Lex Bolt, Predicting a robot’s position on a football field by training a machine learning algorithm on artificially generated data, Bachelor thesis, Universiteit van Amsterdam, June 23, 2023.
Tobie Werner, Exploring the Effectiveness of Object Detection Training in Virtual Environments, Bachelor thesis, Universiteit van Amsterdam, June 23, 2023.
Fyor Klein Gunnewiek, Quantifying the Reality Gap in Abstracted Pedestrian Detection in Simulated Environments, Bachelor thesis, Universiteit van Amsterdam, June 23, 2023.
Jasper Mulder, Intersection Navigation utilizing Bird’s Eye View representations from 3D Image Features , Bachelor thesis, Universiteit van Amsterdam, March 2023.
Xavier Monté, Neural Factorization of Shape and Reflectance of a football Under an Unknown Illumination, Bachelor thesis, Universiteit van Amsterdam, February 2023.
Wim Pilkes, Real-time obstacle avoidance for micro aerial vehicles in 2D and 3D narrow spaces, Bachelor thesis, Universiteit van Amsterdam, July 2022.
Daniël van Dijk, Soccer behaviour prediction with deep neural networks in Soccer Simulation 2D, Bachelor thesis, Universiteit van Amsterdam, July 2022.
Abel J. Oakley, Using Geometric Gradient Analysis to detect Out of Distribution Data for YOLO, Bachelor thesis, Universiteit van Amsterdam, July 2022.
Niels Sombekke, Monocular Depth Estimation for Light-Weight Real-Time Obstacle Avoidance, Bachelor thesis, Universiteit van Amsterdam, July 2022.
Daniël Vermaas, RoboCup - The Visual Referee Challenge, Bachelor thesis, Universiteit van Amsterdam, July 2022.
Sebastiaan Aflaki Teaching a Virtual Duckietown Agent to Stop, Bachelor thesis, Universiteit van Amsterdam, April 2022.
Henk Schaapman Reconstructing vehicle tracks from a fish-eye lens dataset, Bachelor thesis, Universiteit van Amsterdam, January 2022.
Emiel Sanders, Understanding Behavior of the Nao Robot, Bachelor thesis, Universiteit van Amsterdam, June 2021.
Thomas van Orden, Cheating by Segmentation, Bachelor thesis, Universiteit van Amsterdam, June 2021.
Emily Mes, Point planning and drift correction based on reliable door detection, Bachelor thesis, Universiteit van Amsterdam, June 2021.
Imre Fodi, Building motion prediction models for self-driving vehicles, Bachelor thesis, Universiteit van Amsterdam, February 2021.
Marlon de Jong, SLAM at the Katwijk beach, Bachelor thesis, Universiteit van Amsterdam, July 2020.
Carmen Veenker, Segmenting Continuous Gestures, Bachelor thesis, Universiteit van Amsterdam, July 2020.
Hidde Lekanne gezegd Deprez, Enhancing simulation images with GANs, Bachelor thesis, Universiteit van Amsterdam, July 2020.
Midas Amersfoort, Improving CNN classification performance for small datasets - Post-natural disaster building damage assessment from high-resolution satellite imagery, Bachelor thesis, Universiteit van Amsterdam, June 2020.
Jesper van Duuren, RoboCup Rescue Agent Simulation: Max-Sum as a Decentralized Solution to the Distributed Constraint Optimisation Problem with the use of the AIT-extension, Bachelor thesis, Universiteit van Amsterdam, January 2020.
Donald Nikkessen, Predicting the Visual Cortices Responses by Mixing Perceptual and Categorical Approaches, Bachelor thesis, Universiteit van Amsterdam, January 2020.
Anne-Ruth José Meijer, Simulating the human visual brain using deep neural networks, Bachelor thesis, Universiteit van Amsterdam, June 2019.
Jasper van Eck, NAO RoboCup: Classification of Sound Localization , Bachelor thesis, Universiteit van Amsterdam, June 2019.
Jeroen van Wely, Opponent Detection By Humanoid Robots For The RoboCup SPL Using Multi-scale Color Local Binary Patterns , Bachelor thesis, Universiteit van Amsterdam, June 2019.
Jimmy Badrie, Ball Localization in Humanoid Soccer using Machine Learning, Bachelor thesis, Universiteit van Amsterdam, February 2019.
Julian Main, Finding occluded animals from an aerial point of view, Bachelor thesis, Universiteit van Amsterdam, January 2019.
Tobias Garritsen, Using the Extended Information Filter for Localization of Humanoid Robots on a Soccer Field, June 2018.
Ruben van Heusden, Making a robot stop a penalty - Using Q Learning and Transfer Learning, June 2018.
Max Crous, Combining Weakly and Strongly Supervised Segmentation Methods for Wind Turbine Damage Annotation, June 2018.
Jonathan Gerbscheid, 'People detection on the Pepper Robot using Convolutional Neural Networks and 3D Blob detection', June 2017
Tirza Soute, 'Discovering Available Drinks Through Natural, Robot-Led, Human-Robot Interaction Between a Waiter and a Bartender', June 2017
Dion Oosterman, Improving automatic object detection performance for wildlife conservation drones, June 2016.
Robin Bakker, A Comparison of Decision Trees for Ingredient Classification, June 2016.
Mustafa Karaalioğlu, Real-time 3-D Weighted Scan Matching with Octrees, August 2015.
Sébastien Negrijn, RoCKIn @ Work Visual Servoing - Active vision using template matching on RGB-D sensor images, June 2015.
Areg Shahbazian, Taking up the RoCKIn@Work Object Recognition Challenge With The Bag of Keypoints Approach, June 2015.
Ruben Seggers, People Tracking in Outdoor Environments - Evaluating the Kinect 2 Performance in Different Lighting Conditions, June 2015.
Victor I.C. Hofstede, The importance and purpose of simulation in robotics, June 2015.
Freddy de Greef, A KUKA youBot simulation in USARSim, June 2015.
Duncan S. Ten Velthuis, Nao detection with a cascade of boosted weak classifier based on Haar-like features, July 2014.
Niels W. Backer, Horn And Whistle Recognition Techniques For NAO Robots, June 2014.
Fabian Voorter, A coaching robot in the Standard Platform League, June 2014.
Camiel R. Verschoor, Sensor Fusion on a mini Unmanned Vehicle. Integrating vision-based algorithms on an Parrot AR.Drone to autonomously follow linear shaped structures in a landscape. , July 2012.
Auke J. Wiggers, Recognizing Attack Patterns: Clustering of Optical Flow Vectors in RoboCup Soccer, June 2012.
Maarten P. de Waard, Combining RoboCup Rescue and XABSL, June 2012.
Sammie Katt, Introducing movements and animations to virtual victims in USARSim, June 2012.
Richard Rozeboom, Navigating using a radar sensor in USARSim, June 2012.
Robrecht Jurriaans, Flow based Obstacle Avoidance for Real World Autonomous Aerial Navigation Tasks, Universiteit van Amsterdam, August 2011.
Martijn van der Veen, Optimizing Artificial Force Fields for Autonomous Drones in the Pylon Challenge using Reinforcement Learning, Universiteit van Amsterdam, July 2011.
Olaf Zwennes, Adaptive Indoor Map Generator for USARSim, Universiteit van Amsterdam, June 2011.
Hessel van der Molen, Self-Localization in the RoboCup Soccer Standard Platform League with the use of a Dynamic Tree, Universiteit van Amsterdam, June 2011.
Chaim Bastiaan, Virtual victims in USARSim, Universiteit van Amsterdam, June 2010.
Niels Out, Virtual radar sensor for USARSim, Universiteit van Amsterdam, June 2010.
Rory Breuk, Learning by demonstration using physical manipulation of a robot model, Universiteit van Amsterdam, June 2009.
Quang Nguyen, A Color Based Range Finder for an Omnidirectional Camera, Universiteit van Amsterdam, June 2009.
Christiaan Walraven, Using path planning to grade the quality of a mapper, Universiteit van Amsterdam, June 2009.
Steven Roebert, Creating a bird-eye view map using an omnidirectional camera, June 2008.
Aksel Ethembabaoglu, Active target tracking using a mobile robot in the USARSim, June 2007.
B.A. Slamet, Attention Steering in Behavior-Based Vision, July 2005.
A. Abbo and S. Peelen, Progressive Deepening for GameTrees: An application for RoboRescue, June 2004.
C.A.M. Pieterse, Kleur invariantie voor de Robocup challenge - onderzoek naar een belichtings invariante methode voor object herkenning, June 2004.
Research project Bachelor
Juliette Faury and Basile Mollard, SLAM with the Velodyne Puck Lidar on the KUKA youBot, Internship project, École Nationale Supérieure de Techniques Avancées Bretagne, started April 2024
Joost Weerheim, Building a Compact Platform for Autounomous Driving Research, honours-projcect, Universiteit van Amsterdam, started March 2024
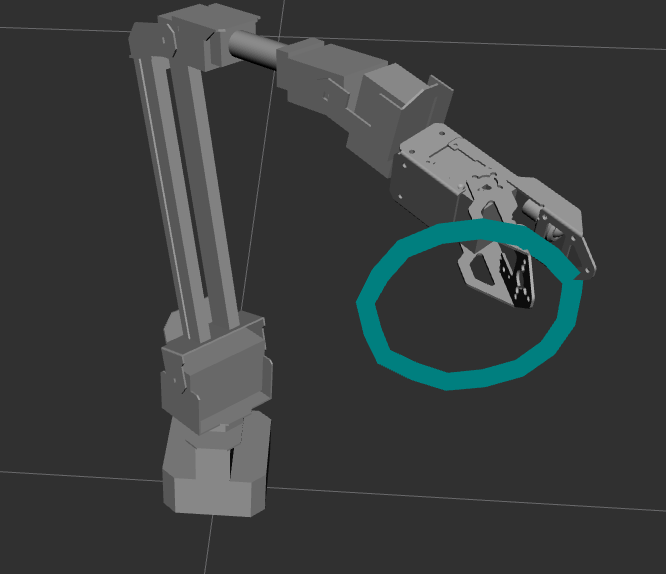
Guillaume Garde and Théo Massa, A ROS 2 Interface for the UMI-RTX robotic arm, Internship report, École Nationale Supérieure de Techniques Avancées Bretagne, August 21, 2023
Activities
Current
 Bachelorteam Artificial Intelligence
Bachelorteam Artificial Intelligence
Finished
ad-interim Chairman Verkenningscommissie Onderwijs 2 (2014-2015) - Life Science Informatics.
- @ See also A. Visser's Educational Curriculum Vitae.