|
I n t e r p r e t a t i e v
a n d e o p d r a c h t
:
"Go where no one has gone before".
Hoewel menig medestudent verder ging met pad-planning of praktische
tests uitvoerden met de UMI-rtx robot (zie afbeelding), besloten
wij tot het bouwen van een ondersteunende tool voor de 'volgende
generatie' eerstejaars en hun kennismaking met de lesstof
uit week 2 en 3. Waarschijnlijk 'did no one go here
before'?
k n u t s e l e n m
e t u n i v e r s e l e v
i r t u e l e r o b o t a r m e n :
In de tw eede
en derde week kregen we te maken met de UMI-rtx robotarm,
welke gebruikt zou worden voor het verzetten van de schaakstukken
(opdracht week 3). Deze robotarm werd bij het testen van de
door ons geïmplementeerde software (uit week 3) niet
daadwerkelijk gebruikt. Een simulator werd gebruikt: de "umirtxsimulator"
(software variant). eede
en derde week kregen we te maken met de UMI-rtx robotarm,
welke gebruikt zou worden voor het verzetten van de schaakstukken
(opdracht week 3). Deze robotarm werd bij het testen van de
door ons geïmplementeerde software (uit week 3) niet
daadwerkelijk gebruikt. Een simulator werd gebruikt: de "umirtxsimulator"
(software variant).
Deze simulator diende tevens als exploratieve tool om te
leren van hoe de mechanische gewrichten van de robotarm samenwerken
tot een ruimtelijk uitvoerend artefact. In week twee leerden
wij reeds de parameters van een robotarm te beschrijven volgens
het Denavit
Hartenberg conventie. Daarbij wordt elke gewricht
van de robot beschreven volgens een ruimtelijk assen-st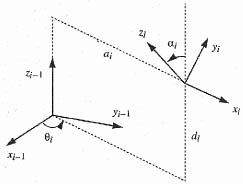 elsel,
relationeel gepositioneerd ten opzichte van het gewricht hoger
in de robotarm. elsel,
relationeel gepositioneerd ten opzichte van het gewricht hoger
in de robotarm.
Omdat de umirtxsimulator zich slechts beperkte tot de specifiek
robot zelf, wilden wij onderzoeken of een meer generaliseerbare
applicatie konden bouwen.
D o e l s t e l l i n g :
Wij beogen een stukje software te bouwen waarbinnen naar
eigen wensen een DH-conventie configuratie kan worden ingevoerd,
om vervolgens een drie dimensionale weergave van de bijbehorende
robotarm te laten zien. Het zou daarbij interessant zijn wanneer
deze tool als ondersteuning kan dienen voor het leren koppelen
van parameters en daadwerkelijke visuele weergave in de ruimte.
Een dergelijke tool kan uiteindelijk ook gebruikt worden om
kinematische berekeningen te controleren of uit te voeren.
|
